

2. Реконструкція фазового простору динамічної системи
2.1. Алгоритм відновлення простору станів динамічної системи
Метод,
що дозволяє відновлювати простір станів
системи та її динаміку, був запропонований
Н. Паккардом та ін., він полягає в
послідовному вимірі часу виходу y
(t)
[6]. Алгоритм
грунтується на реконструкції станів
системи з скалярного вихідного сигналу
з використанням тимчасових затримок
![]()
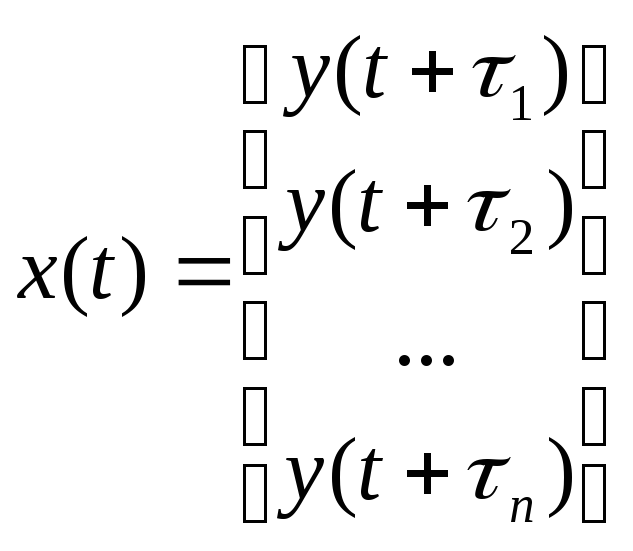 . (10)
. (10)
Ф.
Такенс показував [7],
що для скалярного вихідного процесу
(5), вибраного часу затримки
![]() і розмірності n
реконструйованого атрактора (
і розмірності n
реконструйованого атрактора (![]() ,
де
,
де
![]() – хаусдорфова розмірність) ідентифікується
відображення
– хаусдорфова розмірність) ідентифікується
відображення
![]() ,
яке забезпечує глобальне взаємно-однозначне
уявлення аттрактора.
,
яке забезпечує глобальне взаємно-однозначне
уявлення аттрактора.
У
результаті застосування методу
Паккарда-Такенса відновлюється
відображення (1) визначенням стану
![]() ,
де
,
де
![]() – час послідовних перетинань відповідним
чином обраного перерізу Пуанкаре в
просторі
– час послідовних перетинань відповідним
чином обраного перерізу Пуанкаре в
просторі
![]() відновлених станів x(t).
Теорема Такенса вводиться для досить
загального випадку систем
відновлених станів x(t).
Теорема Такенса вводиться для досить
загального випадку систем
2.2. Реконструкція фазового простору деяких динамічних систем в середовищі Maple
> > > > >
> > restart;with(plots):N:=400;L:=50; ### N:=4000;L:=500;
Warning, the name changecoords has been redefined
![]()
![]()
> for k from 1 to M do x[k]:=evalf(sin(4*Pi*k/N));od:
> for k from 1 to M-L do y[p]:=x[p+L];od:
> SQ:=[seq([x[j],y[j]],j=1..L-M)]:
> SQX:=[seq([j,x[j]],j=1..L-M*0)]:
> pointplot(SQX,symbolsize=20,symbol=point,axes=boxed,font=[TIMES,BOLD,12],labels=["n","x[n]"]);
> pointplot(SQ,symbolsize=20,symbol=cross,axes=boxed,font=[TIMES,BOLD,12],labels=["x[n]","x[n+L]"]);
> pointplot(SQ,symbolsize=20,symbol=cross,style=line,thickness=2,axes=boxed,font=[TIMES,BOLD,12],labels=["x[n]","x[n+L]"]);
> > >> >> >> >> >> >> >> >
> >
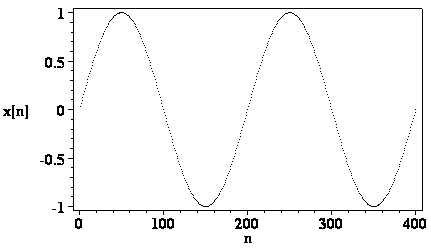
Рис.1. Часова еволюція координати математичного маятника
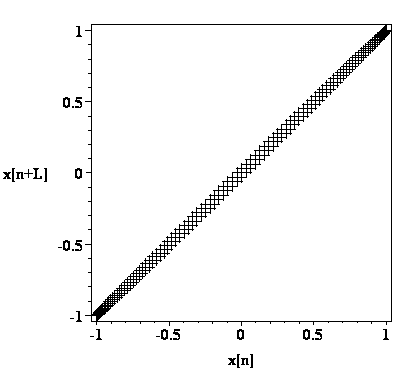
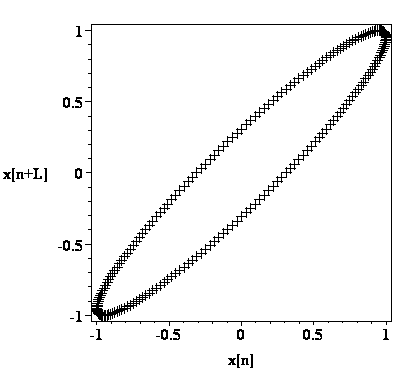
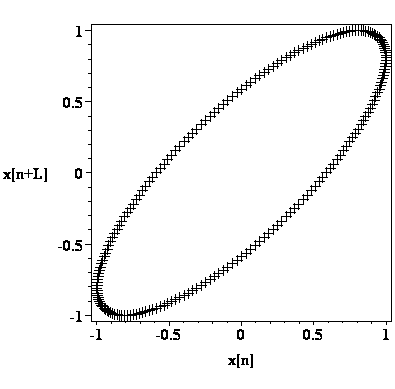
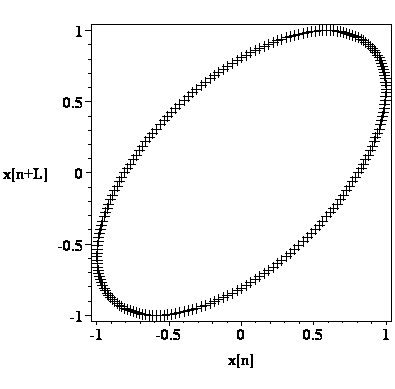

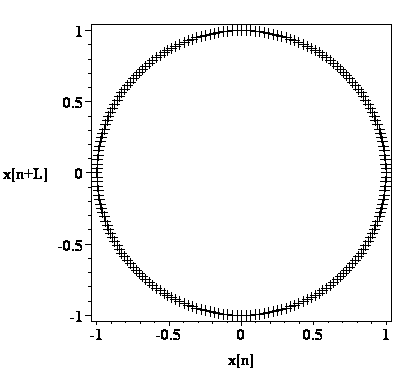
Рис.2. Реконструйований фоновий простір математичного маятника
при різних часових затримках
> restart;with(plots):with(stats):with(linalg):with(DEtools):sigma:=10.0:b:=8/3.:r:=27.0:eq1:=diff(x(t),t)=-sigma*x(t)+sigma*y(t):eq2:=diff(y(t),t)=r*x(t)-y(t)-x(t)*z(t):eq3:=diff(z(t),t)=x(t)*y(t)-b*z(t):
Warning, the name changecoords has been redefined
Warning, the protected names norm and trace have been redefined and unprotected
Warning, the name adjoint has been redefined
> T0:=0:DT:=0.05:TN:=450:tm:=[];whattype(tm); #TN=350
![]()
![]()
> for i from T0 by DT to TN do tm:=[op(tm),i]:end do:#end do = od
> UZL:=nops(tm);#сообщает,ск.подобъектов 1-го уровня находится в объекте tm (это число узловых точек)
![]()
> tm:=array(tm):whattype(tm);#поскольку вывод может быть array
![]()
> soln:=dsolve({eq1,eq2,eq3,x(0)=0,y(0)=1,z(0)=0},{x(t),y(t),z(t)},type=numeric,method=rkf45,maxfun=500000,output=tm):
> xm:=array(1..UZL);ym:=array(1..UZL);zm:=array(1..UZL);
![]()
![]()
![]()
> for i from 1 to UZL do xm[i]:=soln[2,1][i,2]: end do:
> for i from 1 to UZL do ym[i]:=soln[2,1][i,3]: end do:
> for i from 1 to UZL do zm[i]:=soln[2,1][i,4]: end do:
> xcL:=convert(xm,list):ycL:=convert(ym,list):zcL:=convert(zm,list):tcL:=convert(tm,list):
>
Проекции портретов реконструированного аттрактора
> for j from 1 to (UZL-1)/2 by 1 do
> a_x[j]:=op(2*j-1,xcL);
> od:
> for j from 1 to (UZL-1)/2 by 1 do
> b_x[j]:=op(2*j,xcL);
> od:
> for j from 1 to (UZL-1)/2 by 1 do
> a_y[j]:=op(2*j-1,ycL);
> od:
> for j from 1 to (UZL-1)/2 by 1 do
> b_y[j]:=op(2*j,ycL);
> od:
> for j from 1 to (UZL-1)/2 by 1 do
> a_z[j]:= op(2*j-1,zcL);
> od:
> for j from 1 to (UZL-1)/2 by 1 do
> b_z[j]:= op(2*j,zcL);
> od:
> AX:=[seq(a_x[j],j=1..(UZL-1)/2)]:BX:=[seq(b_x[j],j=1..(UZL-1)/2)]:N_AX:=nops(AX);N_BX:=nops(BX);is(N_AX=N_BX);
![]()
![]()
![]()
> P_X:=zip((a_x,b_x)->[a_x,b_x],AX,BX):plot(P_X,color=green);
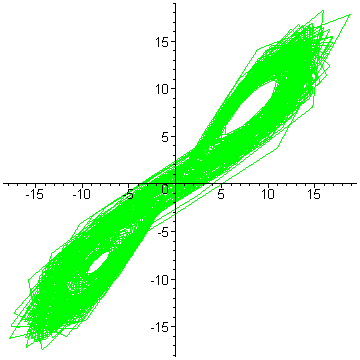

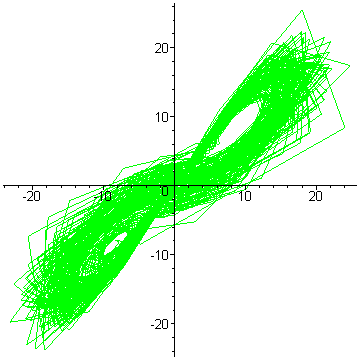
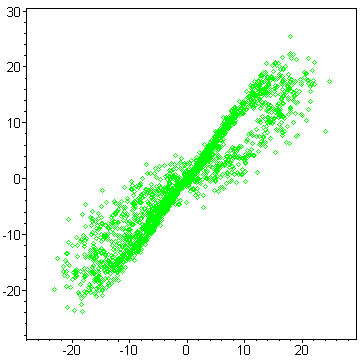
Рис.3. Проекція реконструйованого фазового простору системи Лоренца