

§ 2.16. Полярна система координат. Параметричні рівняння лінії.
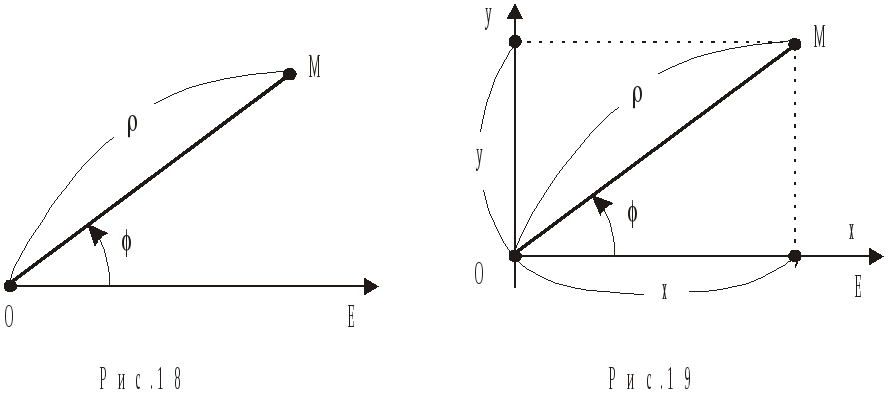
Найбільш важливою після прямокутної системи координат на площині вважається полярна система координат . Ця система також дозволяє визначати положення будь-якої точки на площині за допомогою двох чисел – її координат. Полярна система координат складається з деякої точки О, яка називається полюсом і напрямленої напівпрямої ОЕ, яка виходить із точки О і називається полярною віссю (рис. 18).
Крім того, необхідно задати відрізок одиничної довжини.
Нехай
на площині задані полярна система
координат і точка М. З’єднаємо полюс О
з точкою М. Довжина здобутого відрізку
ρ=|OM| називається полярним радіусом
точки М, а кут
![]() ( кут відлічується від осі ОЕ до відрізку
ОМ проти руху годинникової стрілки) –
полярним кутом (рис. 18). Числа
і є відповідно
першою й другою полярними координатами
точки М (пишеться М(,)).
Можливі значення полярних координат,
як правило, визначаються нерівностями
( кут відлічується від осі ОЕ до відрізку
ОМ проти руху годинникової стрілки) –
полярним кутом (рис. 18). Числа
і є відповідно
першою й другою полярними координатами
точки М (пишеться М(,)).
Можливі значення полярних координат,
як правило, визначаються нерівностями
![]() ,
,
![]() .
Інколи вказані області значень
розширюються. Наприклад, якщо кут
відлічувати від осі ОЕ за рухом
годинникової стрілки, то його значення
береться від’ємним. Існує узагальнення
полярної системи, в якому ρ також може
приймати від’ємні
значення.
.
Інколи вказані області значень
розширюються. Наприклад, якщо кут
відлічувати від осі ОЕ за рухом
годинникової стрілки, то його значення
береться від’ємним. Існує узагальнення
полярної системи, в якому ρ також може
приймати від’ємні
значення.
Якщо на площині задані прямокутна й полярна системи координат, причому полярна вісь ОЕ співпадає з додатною напіввіссю ОХ (рис. 19), то між полярними й прямокутними координатами існує зв’язок:
![]() (16.1)
(16.1)
![]() (16.2)
(16.2)
Формули (16.1) виражають декартові координати через полярні, а формули (16.2) – полярні через декартові. Друга з формул (16.2) дає два значення координати із проміжку [0;2). Необхідно взяти те з них, яке задовольняє рівнянням (16.1).
Приклад
1. Відмітити на площині точки
![]() ),
),
![]() що задані полярними координатами.
що задані полярними координатами.
Розв’язання.
Для побудови точки М![]() з полярного полюса проводимо промінь
під кутом
з полярного полюса проводимо промінь
під кутом
![]() до полярної осі і відкладаємо на ньому
відрізок довжиною 3. Точки М
до полярної осі і відкладаємо на ньому
відрізок довжиною 3. Точки М![]() і М
і М![]() будуються подібно (рис. 20).
будуються подібно (рис. 20).
Приклад
2. Побудувати лінію
![]() .
.
Розв’язання.
Врахуємо, що так як
![]() ,
то може приймати
значення лише на відрізку [0;]
(на цьому відрізку
,
то може приймати
значення лише на відрізку [0;]
(на цьому відрізку
![]() ).
Знаходимо координати деяких точок даної
лінії і записуємо їх у таблицю.
).
Знаходимо координати деяких точок даної
лінії і записуємо їх у таблицю.
-
0



0

2

0
Відмічаємо знайдені точки на площині і з’єднуємо їх плавною лінією (рис. 21).

Приклад
3 В прямокутній системі координат
коло задане рівнянням
![]() Знайти рівняння цього кола в полярних
координатах, вважаючи, що полярна вісь
співпадає з додатною напіввісью Ох.
Знайти рівняння цього кола в полярних
координатах, вважаючи, що полярна вісь
співпадає з додатною напіввісью Ох.
Розв’язання. Використовуючи формули (16.1), маємо
![]()
![]()
Як бачимо, в полярній системі координат рівняння кола значно простіше, ніж у декартовій.
При
розв’язанні багатьох прикладних задач
зручно використовувати так звані
параметричні рівняння лінії, тобто,
рівняння, в яких координати точок лінії
задаються у вигляді функцій від деякої
змінної величини t (параметра). Для таких
рівнянь прийнятий запис
![]()
![]() .
Якщо в параметричних рівняннях
виключити параметр t, то
здобудемо звичайне рівняння лінії.
.
Якщо в параметричних рівняннях
виключити параметр t, то
здобудемо звичайне рівняння лінії.
Приклад4.
Крива задана параметричними
рівняннями
![]()
![]() Побудувати дану криву і визначити
її тип.
Побудувати дану криву і визначити
її тип.
Розв’язання. Визначаємо координати деяких точок лінії і заносимо їх у таблицю (очевидно, що параметр t достатньо змінювати від 0 до 2).
|
t |
0 |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|

Використовуючи знайдені точки, будуємо криву (рис. 22).
Дана лінія дуже схожа на еліпс. Переконаємося, що це справді так (виключаємо параметр t):

![]()


![]() ,
,
![]() .
.