

2. 1. Кинематика.
2.1.1. Механическое движение. Физические модели реальных тел, используемые в механике. Система отсчета. Траектория. Виды движений.
1. Механическое движение - изменение положения тела или отдельных его частей в пространстве с течением времени.
Внутреннее строение движущихся тел, их химический состав не влияет на механическое движение. Для описания движения реальных тел в зависимости от условий задачи пользуются различными моделями: материальная точка, абсолютно твердое тело, абсолютно упругое тело, абсолютно неупругое тело и т.д.
Материальной точкой называется тело, размерами и формой которого можно пренебречь в условиях данной задачи. В дальнейшем вместо термина "материальная точка" будем употреблять термин "точка". Одно и то же тело можно свести к материальной точке в одной задаче, и необходимо учитывать его размеры в условиях другой задачи. Например, расчет движения самолета, летящего над Землей, можно производить, считая его материальной точкой. А при расчете обтекания воздухом крыла того же самолета надо учитывать форму и размеры крыла.
Любое протяженное тело можно рассматривать как систему материальных точек.
Абсолютно твердое тело (а. т. т.) - тело, деформацией которого можно пренебречь в условиях данной задачи. А.т.т. можно рассматривать как систему жестко связанных между собой материальных точек, т.к. расстояние между ними не изменяются при любых взаимодействиях.
Абсолютно упругое тело - тело, деформация которого подчиняется закону Гука (см. § 2.2.2.), и после прекращения силового воздействия оно полностью восстанавливает первоначальные размеры и форму.
Абсолютно неупругое тело - тело, которое после прекращения силового воздействия на него не восстанавливается, а полностью сохраняет деформированное состояние.
2. Для определения положения тела в пространстве и во времени надо ввести понятие системы отсчета. Выбор системы отсчета произволен.
Системой отсчета называется тело или группа тел, считающиеся условно неподвижными и снабженные устройством отсчета времени (часами, секундомером и т.д.), относительно которых рассматривается движение данного тела.
Неподвижное тело (или группу тел) называют телом отсчета и для удобства описания движения с ним связывают систему координат (декартову, полярную, цилиндрическую и т.д.).
Выберем в качестве системы координат декартову прямоугольную систему XYZ (подробно см. [8]). Положение точки С в пространстве можно определить координатами х,y,z (Рисунок 1).
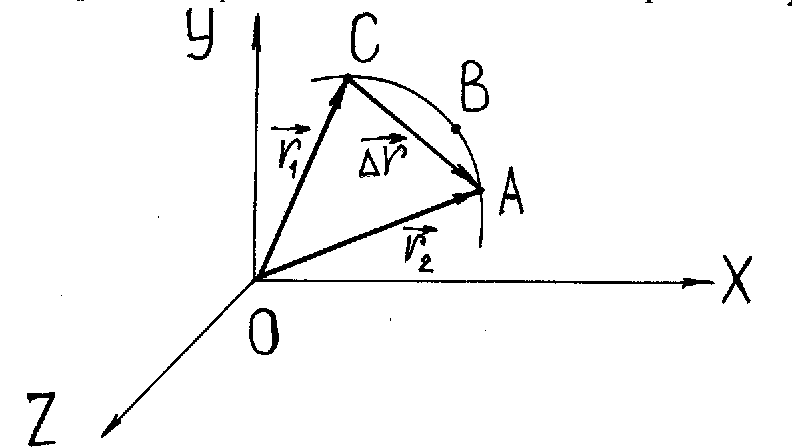
Рисунок 1 - Определение положения точки в декартовой
системе координат.
Однако положение той же точки в пространстве можно задать с помощью одной векторной величины r = r(x,y,z), называемой радиус-вектором точки С (Рисунок 1).
3. Линия, которую тело описывает при своем движении, называется траекторией. По виду траектории движения можно разделить на прямолинейные и криволинейные. Траектория зависит от выбора системы отсчета. Так, траектория движения точек винта самолета относительно летчика - окружность, а относительно Земли - винтовая линия. Другой пример: какова траектория движения кончика иглы проигрывателя относительно пластинки? корпуса проигрывателя? корпуса звукоснимателя? Ответы таковы: спираль, дуга окружности, состояние покоя (игла неподвижна).