

2.2.7. Динамические характеристики вращательного движения. Момент силы. Момент импульса.
При поступательном движении системы все ее точки проходят одинаковые пути, имеют в данный момент времени одинаковые скорости и ускорения. При вращательном движения твердого тела все эти характеристики различны для разных точек вращающегося тела, поэтому и математическая форма 2-го закона Ньютона будет иной. При вращательном движении существенно изменяются сами понятия причины, вызывающей вращение, и величины, определяющей инертность тела.
При поступательном движении динамическими характеристиками являются сила, масса, импульс. При вращательном движении динамическими характеристиками являются момент силы, момент инерции, момент импульса. Эти характеристики можно рассматривать относительно точки вращения (полюса) и относительно оси вращения. В дальнейшем будем рассматривать эти характеристики относительно оси вращения. Определим эти характеристики.
1.Момент силы, действующей на материальную точку, относительно оси вращения.
а) Пусть материальная точка массы m вращается относительно оси ОО΄. Обозначим r - радиус-вектор, проведенный от оси вращения до точки приложения силы F (Рисунок 10).
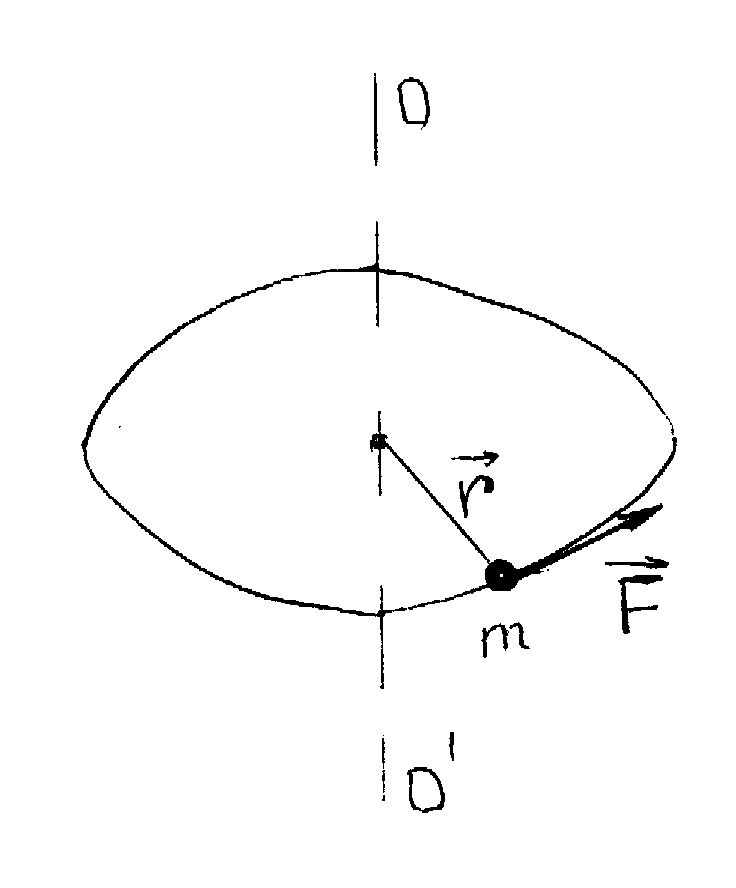
Рисунок 10. Вращение материальной точки
Моментом силы F относительно оси вращения называется вектор M, равный векторному произведению радиус-вектора на вектор силы M = [r∙F] и направленный по оси вращения в сторону, определяемую по правилу правого буравчика
Модуль вектора момента силы равен M = F∙r∙sinα, где α - угол между векторами r и F.
2. Момент импульса.
Моментом импульса материальной точки относительно точки называется вектор L, равный векторному произведению радиуса-вектора r на вектор импульса P: L = [r∙P] = [r∙mv],
где m, v - соответственно масса и вектор скорости точки. Направление L определяется по правилу правого буравчика. Модуль вектора L = mv∙r∙sinα, где α - угол между векторами r и v.
Проекцией момента импульса материальной точки относительно оси вращения называется величина L, равная произведению импульса Р на радиус окружности Rz, по которой движется точка относительно некоторой оси вращения Z.
Lz = mv∙Rz
3. Момент инерции материальной точки относительно оси вращения
Моментом инерции материальной точки относительно оси вращения называется физическая величина, численно равная произведению массы точки на квадрат расстояния точки до оси вращения (Рисунок 10).
I = m∙r2
Момент инерции - величина скалярная.
Единица измерения момента инерции является 1 кг∙м2
Моментом инерции механической системы относительно неподвижной оси называется физическая величина, равная сумме произведений масс всех точек системы на квадраты их расстояний до оси вращения.
I =
![]() mi∙ri2
mi∙ri2
Для твердого
тела, разбитого на элементарные массы
∆ mi ,
момент инерции относительно оси равен
I =
![]() ∆
mi∙ri2.
∆
mi∙ri2.
Моменты инерции тел правильной геометрической формы могут быть легко вычислены. Вычисления проводятся методом интегрирования бесконечно малых элементов инерции, выбираемых исходя из геометрической симметрии тел правильной формы. В Таблице 2 приведены результаты расчетов моментов инерции для тел правильной формы относительно оси вращения ОО', проходящей через их центр масс.

Для расчета моментов инерции вращающихся тел вокруг оси, не проходящей через центр масс тела, можно использовать теорему Гюйгенса-Штейнера. Применение этой теоремы позволяет экспериментально определить момент инерции тела произвольной формы по известному периоду колебаний тела правильной формы заданной массы, что весьма полезно на практике.