

7.8 Особенности наземной фотограмметрической съемки инженерных конструкций и сооружений
Методы и технологии фотограмметрической обработки наземных снимков горных районов, выполняемых с целью создания карт и цифровых моделей местности, архитектурных сооружений и строительных объектов практически ничем не отличаются от методов и технологий применяемых при обработке аэрофотоснимков.
При съемке инженерных конструкций, таких как автомобили, модели самолетов и космических кораблей, параболические антенны и других, подобных перечисленным, объектов, с целью максимальной достоверности и точности полученных результатов и обеспечения возможности автоматизации измерений снимков, используют специально разработанные для достижения этих целей методы наземной стереофотограмметрической съемки.
Рассмотрим некоторые из этих методов.
При изучении деформации инженерных конструкций под действием внешних нагрузок, на поверхность исследуемой конструкции наносят маркировочные знаки, форма которых, например, точка, окружность, обеспечивает возможность монокулярного измерения их изображений на снимках, как в интерактивном, так и автоматическом режимах. Это обстоятельство позволяет производить съемку объекта, используя конвергентный случай съемки. С целью автоматической идентификации номеров маркированных точек используют специальные кодированные марки, образцы которых приведены на рис. 7.25 и 7.26.
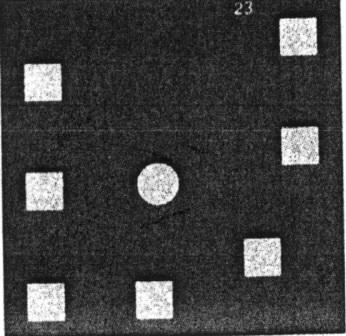
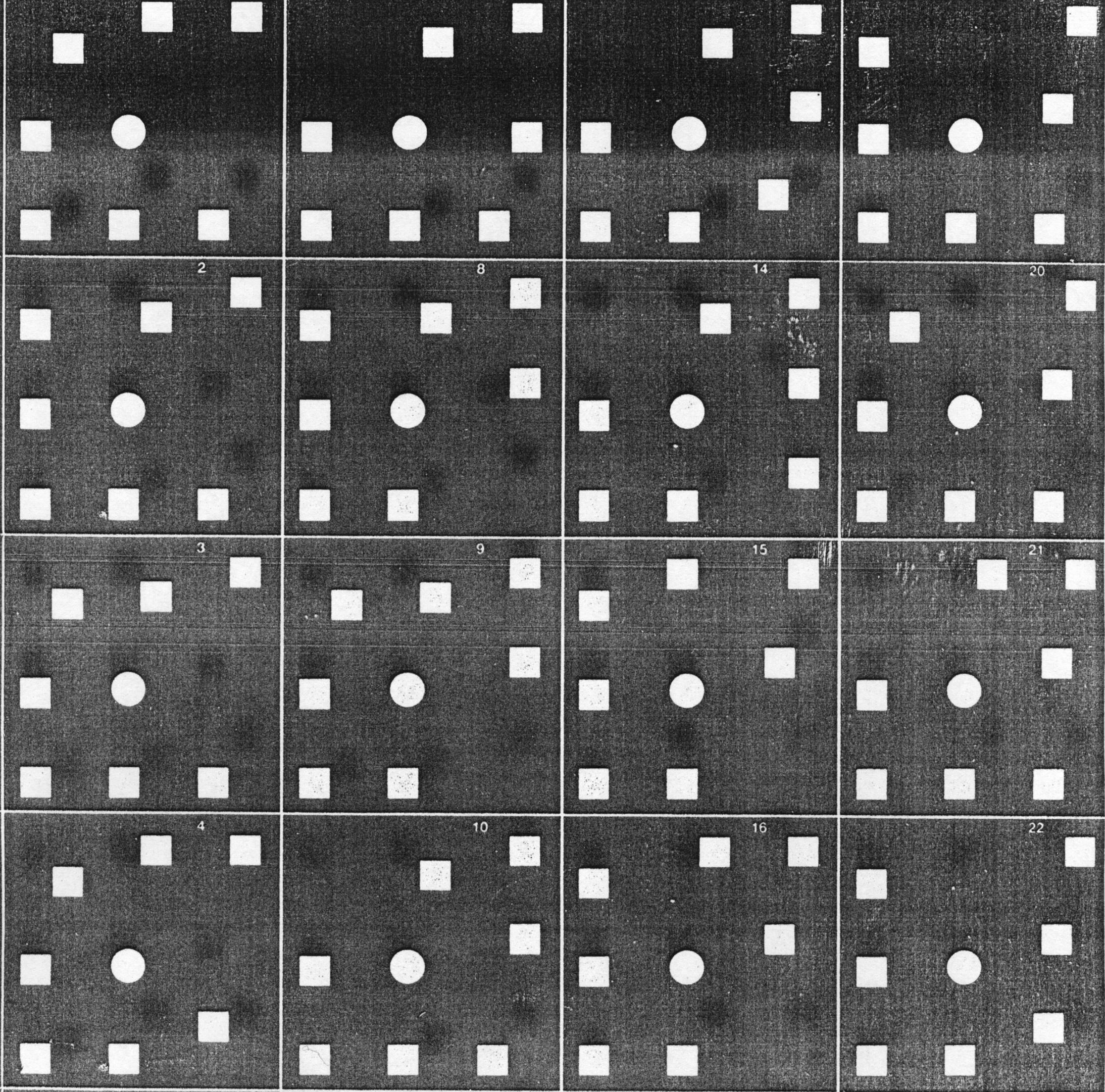
Рис.7.25 Кодированная марка фирмы Leica.
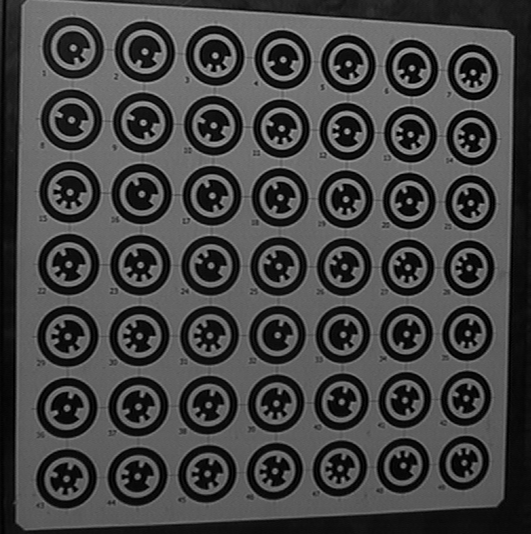
Рис.7.26 Кодированная марка ГосНИИ авиационных систем.
При съемке поверхностей объектов с малоконтрастными поверхностями для их маркировки используют метод оптического проектирования меток на эти поверхности. Например, в наземной фотограмметрической съемочной системе V-STARS фирмы Leica маркированных точек проектируются на поверхность объекта с помощью оптического проектора (Рис. 7.27).
С помощью оптического проектора на малоконтрастные поверхности исследуемого объекта проектируют структуированное изображение в виде случайного поля яркостей или в виде световых полос (Рис.7.28 и 7.29).
На рис.7.30 представлена мобильная стереофотограмметрическая система для определения профиля дорожного полотна «Mapvision». В этой системе лазерный луч сканирует поверхность дороги поперек направления движения, а каждое положение светового пятна от лазера фиксируется на стереопаре снимков. Автоматизированное измерение координат изображения на снимках не представляет трудностей, так как на снимках фиксируется только изображение светового пятна.
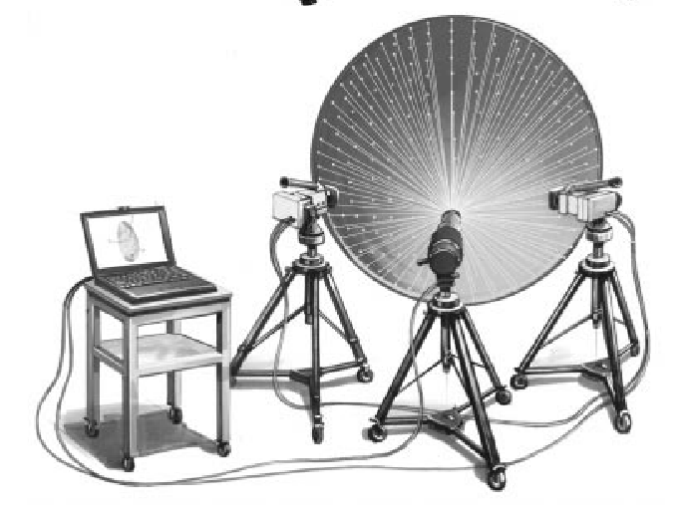
Рис.7.27 Проектирование маркированных точек в съемочной системе V-STARS фирмы Leica
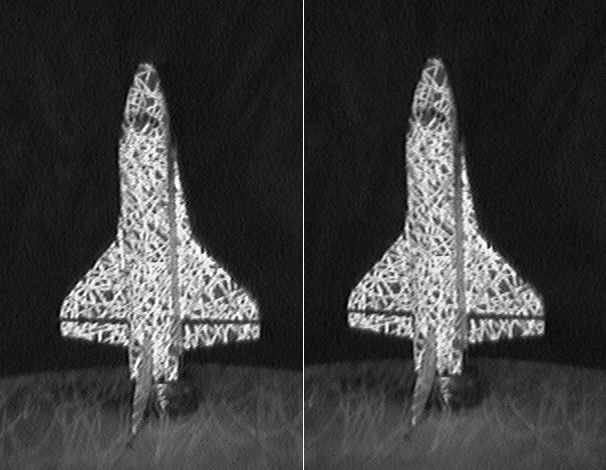
Рис.7.28
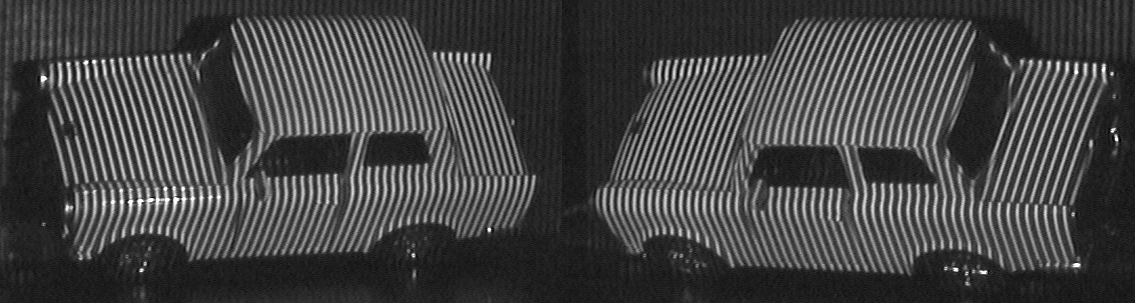
Рис.7.29
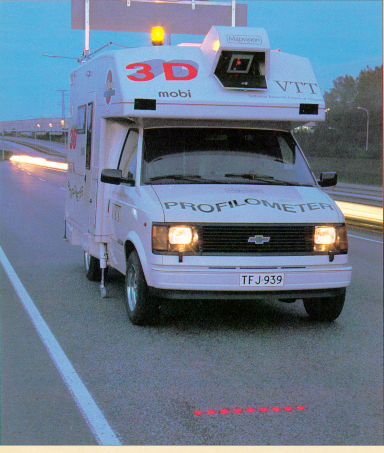
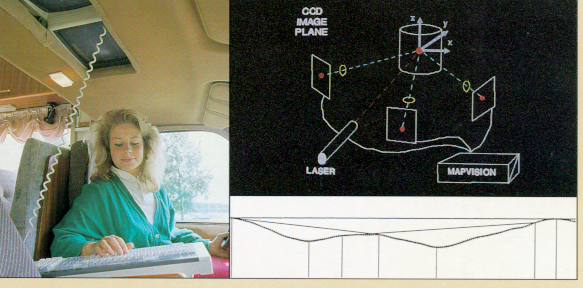
Рис. 7.30