

-
7.3.2 Калибровка цифровых фотокамер по снимкам плоского тест-объекта.
-
При использовании для фотограмметрической калибровки цифровых фотокамер плоского тест-объекта, представляющего собой поле маркированных точек расположенных в плоскости, съемку тест-объекта необходимо выполнять при горизонтальном расположении камеры и с наклоном оптической оси камеры относительно плоскости тест-объекта (7.13).
Рекомендуется выполнить наклонную съемку со всех сторон тест-объекта при приблизительно равном угле наклона съемочной камеры.
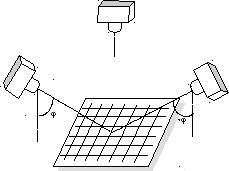
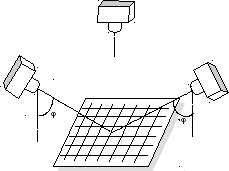
Рис. 7.13 Съемка плоского тест-объекта
Определение параметров фотограмметрической калибровки по полученным таким образом снимкам производится в результате совместной обработки результатов измерений по всем полученным снимкам, таким же образом, как и при обработке снимков пространственного тест-объекта.
-
7.3 Системы координат, применяемые в наземной фотограмметрии и элементы ориентирования наземных снимков.
В наземной фотограмметрии используются те же системы координат снимка, объекта и фотограмметрической модели, которые применяются при обработке аэро и космических кадровых снимков.
Дополнительно в наземной фотограмметрии используют базисную систему координат, представленную на рис. 7.14
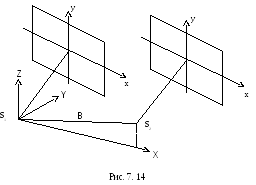
Начало базисной системы координат совмещено с центром проекции левого снимка S1. Ось Z совмещена с вертикалью, проведенной из центра проекции S1 . Ось X совпадает с проекцией базиса фотографирования на горизонтальную плоскость XY, проведенную через центр проекции S1. Ось Y дополняет систему до правой.
7.4 Основные случаи наземной стереофотограмметрической съемки
При выполнении наземной стереофотограмметрической съемки в зависимости от условий съемки (расположения объекта относительно точек фотографирования и его размеров) используется несколько основных вариантов съемки, которые в фотограмметрии называют основными случаями съемки.
.
К основным случаям наземной стереофотограмметрической съемки относят нормальный, равноотклоненный, равнонаклонный и конвергентный случаи съемки.
Нормальный случай съемки является наиболее распространенным в практике фотограмметрии случаем съемки.
В этом случае оси x, y и z систем координат съемочных камер (снимков) приблизительно параллельны соответственно осям X, Z и Y базисной системы координат (рис.7.15). При этом угловые элементы внешнего ориентирования снимков имеют следующие значения: 1 2 0o , 1 2 90o ,1 1 0o.
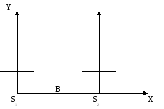
Рис. 7.15
Как показал практический опыт работ при съемке цифровыми камерами со штативом или без него значения угловых элементов внешнего ориентирования съемочных камер устанавливаются с точностью не хуже 3-7˚.
Нормальный случай съемки используют когда базис при съемке можно расположить приблизительно параллельно объекту съемки и по высоте объект полностью изображается на снимках стереопары.
Равноотклоненный случай съемки.
В отличие от нормального случая съемки в равноотклоненном случае оси z (оптические оси) съемочных камер приблизительно параллельны между собой и отклонены от оси Y базисной системы координат на угол (рис. 7.16). Угловые элементы внешнего ориентирования снимков в этом случае имеют следующие значения: 1 2 , 1 2 90o , 1 1 0o.
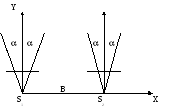
Рис. 7.16
Равнооотклоненный случай съемки используют в качестве дополнения к нормальному случаю при необходимости увеличить зону съемки по горизонтали. Для этого с одного базиса производят съемку стереопары нормального случая и одной или двух стереопар равноотклоненного случая съемки. Кроме того, равнотклоненный случай съемки целесообразно приметять при непараллельности базиса съемки объекту.
Равнонаклонный случай съемки.
В равнонаклонном случае съемки оси z (оптические оси) камер приблизительно параллельны между собой и наклонены относительно горизонтальной плоскости на некоторый угол (рис.7.17). Угловые элементы внешнего ориентирования снимков в этом случае имеют следующие значения: 1 2 0o , 1 2 , 1 1 0o.


Z

 Y
Y
Y
Рис. 7.17
Наклоном съемочной камеры на угол можно добиться оптимального расположения объекта на снимке. Равнонаклонный случай целесообразно использовать, например, при съемке высоких зданий.
Конвергентный случай съемки.
В конвергентном случае съемки с целью увеличения базиса фотографирования и как следствие точности фотограмметрических определений оптические оси съемочных камер повернуты друг к другу на углы и пересекаются под углом , называемом углом конвергентности (рис.7.18).
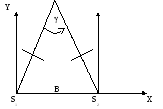
Рис.7.18
При значительных значениях угла конвергенции становится невозможным стереоскопическое наблюдение и измерение полученных стереопар снимков конвергентного случая съемки. Поэтому конвергентный случай используется для съемки объектов с четкими контурами или маркированными точками, что обеспечивает возможность монокулярных измерений. Стереоскопическое наблюдение и измерение стереопар снимков конвергентного случая съемки возможно в случае их предварительного цифрового трансформирования в стереопару снимков нормального случая съемки.
В ряде случаев практики, например, при съемке высоких сооружений, целесообразно производить получение стереопар снимков нормального, равноотклоненного и равнонаклонного случаев съемки с вертикального базиса. В этом случае в базисной системе координат ось Z горизонтальна.

Рис.7.19
На рис. 7.19, в качестве примера, представлена стереопара снимков нормального случая съемки с вертикального базиса.
Маршрутная и блочная съемки
При съемке протяженных объектов целесообразно производить маршрутную или блочную съемку объекта.
В качестве примера на рис. 7.20 представлен вариант маршрутной съемки здания.
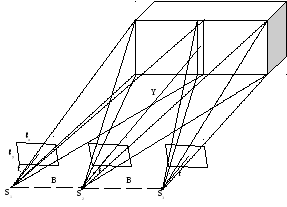
Рис. 7.20
В маршрутной съемке из смежных снимков маршрута, формируется стереопары снимков нормального или равнонаклонного случаев съемки. При этом съемка выполняется таким образом, чтобы у смежных стереопар имелась область так называемого тройного перекрытия. Для этого съемку выполняют таким образом, чтобы смежные снимки в маршруте перекрывались по направлению маршрута приблизительно на 60 %.
В случае если, проведении маршрутной съемки объект изображается на снимках по высоте не полностью, производят блочную ( многомаршрутную) съемку, в которой выполняют дополнительную маршрутную съемку объекта, формируя один или несколько параллельных первому маршрутов с поперечным перекрытием маршрутов не меньше 20 – 30 %. Возможны два варианта проведения блочной съемки. В первом варианте маршрутные съемки производят с разных высот, например с поверхности земли и крыши здания ( рис. 7.21 ). Во втором варианте с каждой точки фотографирования получают снимки при разных углах наклона , из которых формируют перекрывающиеся маршруты из стереопар снимков нормального и равнонаклонного случаев съемки (рис. 7.22 ).
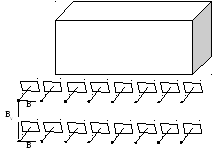
Рис. 7.21
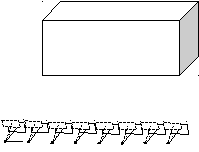
Рис. 7.22
При выполнении наземной стереофотограмметрической съемки могут возникнуть так называемые «мертвые зоны» (участки объекта не изобразившиеся на стереопаре снимков). Для съемки этих участков объекта производят съемку с дополнительных базисов. На рис. 7.23 мертвые зоны, возникающие при проведении съемки с точек фотографирования S1, S2 , S3 показаны серым цветом. Для съемки этой части объекта необходим дополнительный базис фотографирования (S4 – S5).
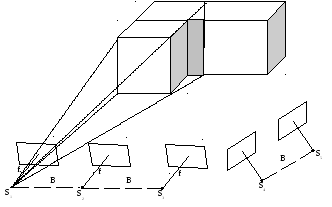
Рис. 7.23