

2.8. Асинхронный двигатель как объект регулирования
Из структурной схемы (рис.2.10) следует, что для процессов в роторе в качестве входных переменных можно считать токи статора вдоль осей координат x и y. В этом случае процессы описываются уравнениями (2.58), которые в операторной форме записи приводятся к виду:
 (2.70)
(2.70)
Решая относительно потокосцеплений, находим:
 (2.71)
(2.71)
При вычислении электромагнитного момента воспользуемся одним из уравнений в (2.48)
![]() .
.
С учётом (2.68) после группировки отдельных переменных, получим:
 ,
или
,
или
 (2.72)
(2.72)
Введём понятие передаточной функции
 .(2.73)
.(2.73)
Постоянная времени
Т и коэффициент
демпфирования
![]() зависят от абсолютного скольжения и от
постоянной времени ротора:
зависят от абсолютного скольжения и от
постоянной времени ротора:
 (2.74)
(2.74)
Характеристическое уравнение имеет два сопряжённых комплексных корня
![]() ,
,
где коэффициент
затухания
![]() и угловая частота колебаний
и угловая частота колебаний
![]() рассчитываются по формулам:
рассчитываются по формулам:
 (2.75)
(2.75)
С учётом (2.74) получим:
 (2.76)
(2.76)
Период колебаний
![]() (2.77)
(2.77)
Частота собственных колебаний совпадает с частотой переменных в роторе
![]() (2.78)
(2.78)
Из приведенных уравнений видно, что электромагнитные процессы имеют колебательный характер, время затухания колебаний зависит от постоянной времени ротора (2.76), а частота колебаний пропорциональна абсолютному скольжению (2.78).
П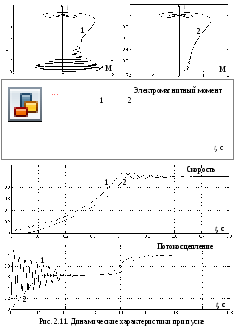 оведение
двигателя при пуске характеризуется
кривыми на рис. 2.11.
оведение
двигателя при пуске характеризуется
кривыми на рис. 2.11.
На приведенном рисунке рассматриваются два случая отмеченные цифрами 1 и 2.
В первом случае в
момент времени
![]() скачком прикладывается номинальное
напряжение с частотой 50 Гц.
скачком прикладывается номинальное
напряжение с частотой 50 Гц.
Во втором случае на
отрезке времени 0 < t
< 0,1c
напряжение меняется по линейному закону,
а далее остаётся постоянным и равным
номинальному значению. На начальном
участке потокосцепление
![]() ,
также как и напряжение, тоже нарастает
примерно по линейному закону. Благодаря
этому существенно уменьшаются колебания
электромагнитного момента возникающие
в начальный момент пуска. Устройства,
работающие по такому принципу, стали
называть устройствами плавного пуска.
,
также как и напряжение, тоже нарастает
примерно по линейному закону. Благодаря
этому существенно уменьшаются колебания
электромагнитного момента возникающие
в начальный момент пуска. Устройства,
работающие по такому принципу, стали
называть устройствами плавного пуска.
Выводы:
1. Асинхронный двигатель
представляет собой замкнутую систему
(рис. 2.10). Если его рассматривать со
стороны приложенного напряжения, то
это нелинейное колебательное звено
пятого порядка с переменными параметрами.
В качестве переменного параметра
выступает абсолютное скольжение
![]() .
.
2. Коэффициент затухания колебаний (2.76) α и время затухания процесса зависят от постоянной времени ротора.
3. Частота колебаний
(2.78) пропорциональна абсолютному
скольжению
![]() .
.
2.9. Модели асинхронного двигателя
Модели бывают математические и виртуальные.
В качестве примера на рис.2.12 приводится математическая модель в системе координат x,y. При составлении модели в качестве исходных данных принималась система дифференциальных уравнений (2.62) – (2.64) и структурная схема (рис.2.10). Модель состоит из двух частей.
В верхней части
располагаются элементы, моделирующие
процессы в статоре, а в нижней части –
процессы в роторе. Вычисление ЭДС,
наводимой в статоре, выполняется по
(2.60). Модель сложная, содержит большое
количество элементов, она повторяет
структурную схему и дополнена вычислениями
токов ротора и потокосцеплений воздушного
зазора. Предусмотрены узлы для задания
начальных условий. Параметры указываются
 в
рабочем окне параметров маски.
в
рабочем окне параметров маски.
Виртуальное моделирование [10] стало возможным с появлением современных средств вычислительной техники и пакета специализированных программ типа Matlab. Модель можно составить с помощью схем замещения на рис.2.6.
Наиболее простой является модель в системе координат a, b (рис.2.13)
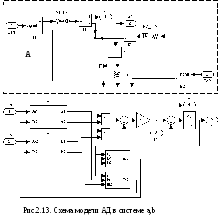
Модель содержит виртуальную часть и математическую.
В виртуальной части
для каждой фазы взята отдельная схема
замещения. В пространстве эти схемы
располагаются по двум взаимноортогональным
осям
![]() и
и
![]() .
.
Модель одной фазы
показана в раскрытом виде. В ней на вход
поступает напряжение:
![]() .
На вход второй фазы подаётся напряжение
.
На вход второй фазы подаётся напряжение
![]() .
.
Для вычисления электромагнитного момента достаточно взять в каждой фазе по два тока
![]() .
.
Дополнительные ЭДС по осям a, b вычисляются по формулам:
Е сли
модель поместить в “черный ящик”, то
она принимает компактный вид (рис.2.14).
сли
модель поместить в “черный ящик”, то
она принимает компактный вид (рис.2.14).
Напряжение к двигателю поступает от источника синусоидального напряжения, у которого можно регулировать амплитуду, частоту и фазу выходного напряжения, его модель приводится на рис.2.15.
Модель 3-х фазной
машины (рис.2.16) содержит три блока со
схемами замещения для каждой фазы. От
ранее рассмотренной модели эта модель
отличается наличием прямых и обратных
координатных преобразователей
![]() ,
,
![]() и
и
![]() .
.
Модель 2-х
фазной машины в системе координат
![]() ,
приводится на рис.2.17.
,
приводится на рис.2.17.
Рис.2.17.
Модель АД в системе координат
![]()
Добавочные ЭДС вводятся в статор и ротор. Они вычисляются по формулам:
Электромагнитный момент вычисляется по формуле
![]() .
.
Если взять виртуальную
часть модели и сравнить с виртуальной
частью модели в системе координат
![]() ,
то по внешнему виду они совпадают.
Отличие состоит в том, что здесь в статор
вводится дополнительная ЭДС. Эта
особенность придаёт модели новые
свойства.
,
то по внешнему виду они совпадают.
Отличие состоит в том, что здесь в статор
вводится дополнительная ЭДС. Эта
особенность придаёт модели новые
свойства.
Так как
система координат и пространственный
вектор напряжения
![]() вращаются с одной скоростью
вращаются с одной скоростью
![]() ,
то в этой системе координат вектор
напряжения можно представить в следующих
формах записи:
,
то в этой системе координат вектор
напряжения можно представить в следующих
формах записи:
![]() .
.
Здесь действительная ось комплексной плоскости совмещена с осью х.
Напряжения
![]() ,
поступающие на вход модели, не содержат
синусоидальных функций, это напряжения
для электрических цепей постоянного
тока.
,
поступающие на вход модели, не содержат
синусоидальных функций, это напряжения
для электрических цепей постоянного
тока.
Таким образом, при анализе процессов в системе координат х, у приходится оперировать с переменными для электрических цепей постоянного тока. Процессы представляются в более наглядном виде, управлять такими процессами проще. Это одно из достоинств модели в системе координат х, у.
Виртуальная часть рассмотренных моделей содержит активные сопротивления и индуктивности. Так как параметры этих элементов в общем случае могут быть переменными и нелинейными, то при моделировании возникает потребность в составлении их моделей (рис.2.18).
Модель активного сопротивления (а) содержит измеритель тока в электрической цепи, безынерционный элемент R и источник ЭДС. Здесь моделируется напряжение на активном сопротивлении для участка электрической цепи, выходная переменная описывается равенством
![]() .
.
Модель индуктивности (б) описывает напряжение на участке электрической цепи содержащей индуктивность
![]() .
.
Операция дифференцирования выполняется с помощью реального дифференцирующего звена. Малая постоянная времени этого звена характеризует точность моделирования.
Модель нелинейной индуктивности (в) отличается от ранее рассмотренной модели наличием нелинейного звена HZ. С помощью этой модели удобно учитывать насыщение магнитной системы. Здесь напряжение для рассматриваемого участка описывается равенством, которое описывает явление электромагнитной индукции (1.1)
![]() .
.
Система замкнутая,
ток протекает под действием приложенного
напряжения. Ток измеряется и его модуль
формируется нелинейным звеном. В качестве
нелинейного звена принимается кривая
намагничивания
![]() .
После дифференцирования формируется
напряжение на индуктивности. Получается,
что потокосцепление
.
После дифференцирования формируется
напряжение на индуктивности. Получается,
что потокосцепление
![]() становится пропорциональным приложенному
напряжению, а ток становится нелинейной
функцией от приложенного напряжения.
Особенность этого участка элект
становится пропорциональным приложенному
напряжению, а ток становится нелинейной
функцией от приложенного напряжения.
Особенность этого участка элект рической
прокомментируем с помощью рис.2.19.
рической
прокомментируем с помощью рис.2.19.
Здесь, в первом
квадранте изображена нелинейная функция,
состоящая из отрезков двух прямых. Во
втором квадранте представлен отрезок
синусоидальной функции
![]() .
Эта кривая пропорциональна приложенному
напряжению на индуктивности. В четвёртом
квадранте располагается кривая
мгновенного тока. При насыщении ток
становится несинусоидальным, возрастает
его амплитуда, появляются дополнительные
составляющие и дополнительные потери,
повышающие нагрев обмотки.
.
Эта кривая пропорциональна приложенному
напряжению на индуктивности. В четвёртом
квадранте располагается кривая
мгновенного тока. При насыщении ток
становится несинусоидальным, возрастает
его амплитуда, появляются дополнительные
составляющие и дополнительные потери,
повышающие нагрев обмотки.
Так как виртуальные модели состоят из обмоток расположенных в пространстве, то при необходимости можно проводить исследование процессов с учётом магнитной и электрической несимметрии, если таковые имеются.
Характеристику “вход-выход ” нелинейного звена можно представлять не только в графическом, но и в аналитическом виде. По этому же принципу составляется модель нелинейного сопротивления.