

2.6. Дифференциальные уравнения ад
Ранее, с помощью схемы замещения АД были получены дифференциальные уравнения (2.41) и (2.42). Воспользуемся уравнениями в пространственной области
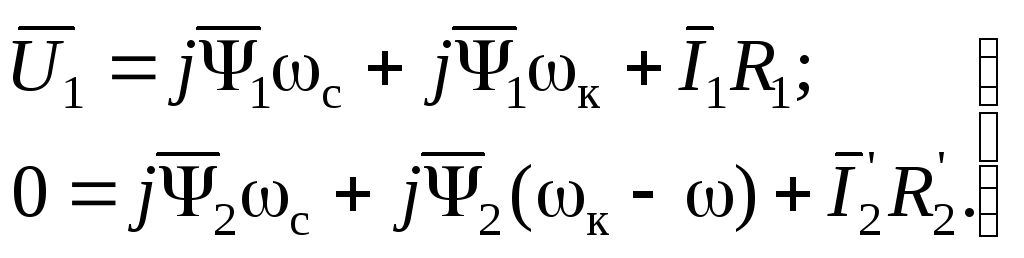 (2.49)
(2.49)
Обратим внимание на члены характеризующие ЭДС, наводимые в двигателе.
Выражения
![]() ,
,
![]() - характеризуют ЭДС самоиндукции, которые
наводятся в статоре и роторе
потокосцеплениями
- характеризуют ЭДС самоиндукции, которые
наводятся в статоре и роторе
потокосцеплениями
![]() и
и
![]() .
.
Выражения
![]() и
и
![]() - характеризуют ЭДС вращения, которые
наводятся в статоре и роторе.
- характеризуют ЭДС вращения, которые
наводятся в статоре и роторе.
В переходных процессах
каждая из переменных является функцией
времени. В технической литературе
мгновенные значения переменных обозначают
малыми буквами. Некоторые трудности
возникают с обозначениями для мгновенных
потокосцеплений. Для них вводят курсив
или жирный шрифт (Ψ
или Ψ).
Мы этого делать не будем, чтобы исключить
определённую путаницу в написании
переменных. Будем помнить, что
![]() и
и
![]()
Переходя в (2.49) к мгновенным значениям переменных, получим:
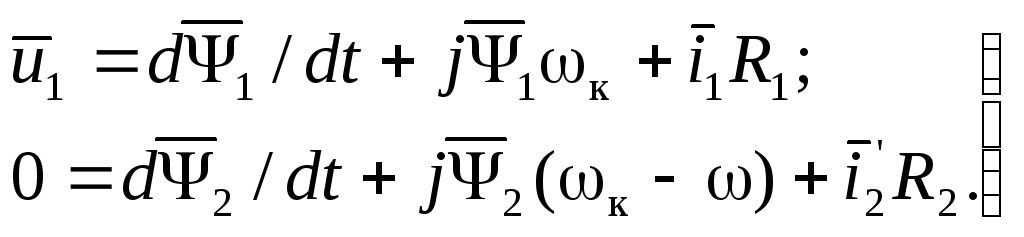 (2.50)
(2.50)
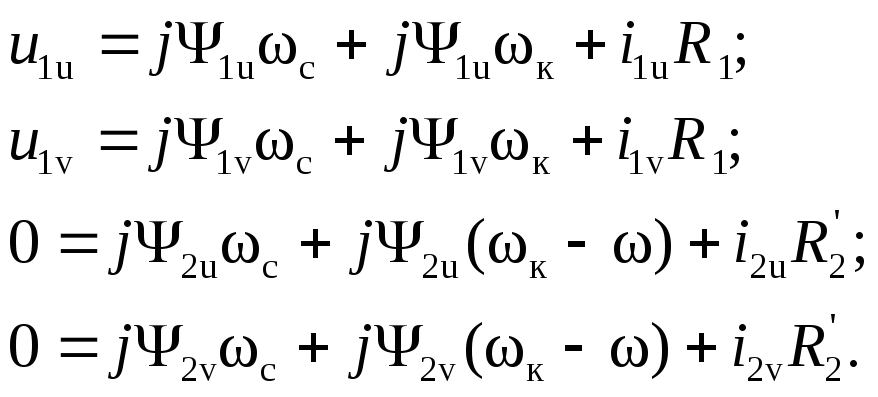
Перемене будем рассматривать на комплексной плоскости, действительную ось совместим с осью системы координат u, а мнимую ось совместим с осью v. Каждую из переменных представим в виде проекций на координатные оси:
![]()
В этом случае уравнения (2.50) принимают вид:

После группировки действительных и мнимых частей каждое из уравнений представляется в виде двух уравнений:
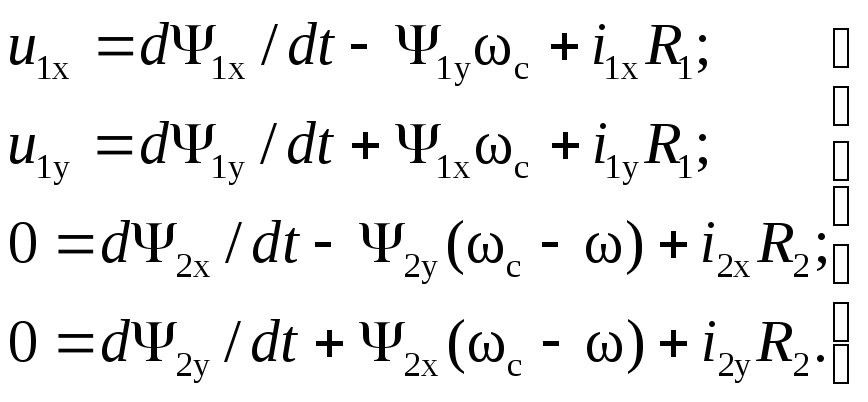
Таким образом, в исходном уравнении (2.49) выполнен переход к мгновенным значениям переменных, и каждая переменная рассматривается в виде проекций на координатные оси u, v. От комплексов перейдём к временной форме записи:
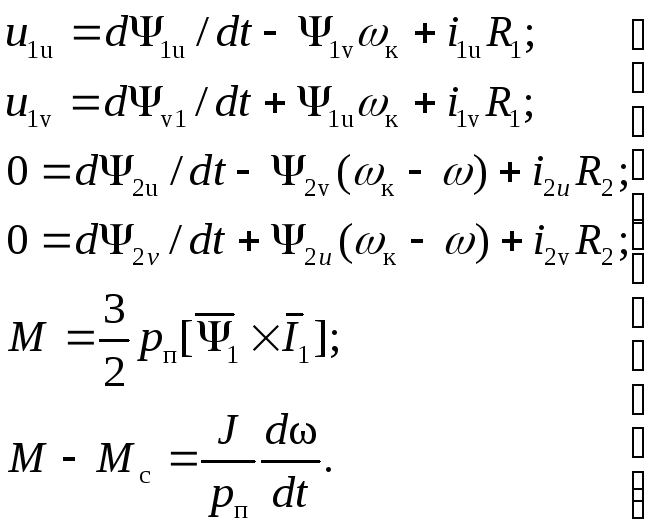 (2.51)
(2.51)
Здесь, в состав уравнений введено одно из уравнений для электромагнитного момента (2.48) и уравнение движения для вращающихся масс.
В уравнениях для статора и ротора в явном виде присутствуют два вида ЭДС с разной физической природой: первые члены – ЭДС самоиндукции, а вторые – ЭДС вращения. Обратим внимание на расстановку знаков для отдельных членов. Знаки расставляются в соответствии с ранее рассмотренными правилами.
Потокосцепления связаны с токами статора и ротора равенствами:
 (2.52)
(2.52)
Выводы:
1. Дифференциальные уравнения получены из схемы замещения АД.
2. Вектор каждой переменной характеризуется двумя направлениями: положительным и фактическим. Эти направления могут не совпадать. Для исключения ошибок желательно не забывать о ранее рассмотренных правилах.
2.7. Структурная схема асинхронного двигателя
Структурную схему постараемся составить в таком виде, чтобы с её помощью можно было решать задачи анализа и синтеза разомкнутых и замкнутых систем. Кроме того, эта схема должна наглядно отражать сущность процессов.
Процессы будем
рассматривать во вращающейся системе
координат
![]() .
Переходя в (2.51) и (2.52) к системе координат
.
Переходя в (2.51) и (2.52) к системе координат
![]() ,
получим:
,
получим:
 (2.53)
(2.53)
 (2.54)
(2.54)
С целью сокращения числа переменных исключим токи ротора и потокосцепление статора. Из (2.54) найдём токи ротора:
 (2.55)
(2.55)
С помощью этих уравнений
из (2.54) находим связь между потокосцеплениями
![]() и
и
![]() :
:
 (2.56)
(2.56)
Здесь введены обозначения:
![]() - коэффициент
электромагнитной связи ротора;
- коэффициент
электромагнитной связи ротора;
![]() - переходная индуктивность
статора (рис.2.9).
- переходная индуктивность
статора (рис.2.9).
П ереходная
индуктивность
ереходная
индуктивность
![]() – это эквивалентная индуктивность
относительно клемм на входе схемы
замещения на рис.2.9.
– это эквивалентная индуктивность
относительно клемм на входе схемы
замещения на рис.2.9.
С учётом (2.55) и (2.56) исходная система уравнений приводится к виду:
 (2.57)
(2.57)
 (2.58)
(2.58)
где
![]() - постоянная времени ротора.
- постоянная времени ротора.
C
помощью (2.58) исключаем производные
![]() и
и
![]() в (2.57):
в (2.57):
 (2.59)
(2.59)
Эти уравнения принимают более простой вид, если ЭДС, наводимую в статоре, представить в виде отдельной переменной:
 (2.60)
(2.60)
С учётом (2.60) уравнения для цепей статора принимают вид:
 (2.61)
(2.61)
Переходя к изображениям, получим:
 (2.62)
(2.62)
Введём понятия передаточных функций для контуров статора и ротора. Они получаются из (2.58) и (2.62):
 (2.63)
(2.63)
 (2.64)
(2.64)
Здесь:
![]() - постоянная времени статора,
- постоянная времени статора,
![]() - постоянная времени
ротора.
- постоянная времени
ротора.
Выполненные преобразования позволяют изобразить структурную схему (рис.2.10).
Структурная схема состоит из двух частей, одна из них отражает процессы в статоре, а другая в роторе. Первую будем называть функциональным преобразователем статора ФПС, а вторую - функциональным преобразователем ротора ФПР. Вычисление составляющих ЭДС статора по (2.60) выполняет функциональный преобразователь ЭДС. Его будем называть ФПЕ.
Из схемы следует, что
асинхронный двигатель представляет
собой замкнутую систему пятого порядка.
Система нелинейная и 2-х канальная.
Нелинейность обусловлена наличием
блоков произведения. Между каналами
![]() имеются внутренние перекрёстные обратные
связи.
имеются внутренние перекрёстные обратные
связи.
С хема
содержит четыре сумматора, которые
отмечены цифрами. В сумматоры 1 и 3
заводится внутренняя обратная связь
по ЭДС статора. Обратим внимание на
расстановку знаков, обратные связи
поступают со знаком плюс. Знаки получены
в соответствии с ранее рассмотренными
правилами.
хема
содержит четыре сумматора, которые
отмечены цифрами. В сумматоры 1 и 3
заводится внутренняя обратная связь
по ЭДС статора. Обратим внимание на
расстановку знаков, обратные связи
поступают со знаком плюс. Знаки получены
в соответствии с ранее рассмотренными
правилами.
В сумматоры 2 и 4 поступают обратные связи по ЭДС ротора. Здесь тоже важно обращать внимание на знаки.
Одна из задач векторного управления сводится к компенсации имеющихся внутренних обратных связей.
Влияние внутренней обратной связи по ЭДС статора можно устранить с помощью внешней обратной связи с обратным знаком. Такой приём используют и в электроприводах постоянного тока.
Влияние внутренней обратной связи по ЭДС ротора можно устранить следующим образом. В сумматор с номером 4 поступают два сигнала. Допустим, что сумма этих сигналов описывается равенством:
![]() .
(2.65)
.
(2.65)
Из структурной схемы
следует, что в этом случае ось x
системы координат автоматически
ориентируется вдоль вектора
![]() ,
так как составляющая потокосцепления
,
так как составляющая потокосцепления
![]() обращается в нуль во всех режимах работы.
То есть выполняются условия:
обращается в нуль во всех режимах работы.
То есть выполняются условия:
![]()
![]() .
(2.66)
.
(2.66)
Решая (2.64) относительно
![]() ,
получим:
,
получим:
![]() .
(2.67)
.
(2.67)
Таким образом, регулируя
угловую частоту
![]() в
соответствии с (2.67) удаётся выполнить
условия (2.66) . В этом случае ось х
вращающейся системы координат
автоматически ориентируется вдоль
вектора
в
соответствии с (2.67) удаётся выполнить
условия (2.66) . В этом случае ось х
вращающейся системы координат
автоматически ориентируется вдоль
вектора
![]() и полностью устраняется влияние
внутренней обратной связи по ЭДС ротора.
и полностью устраняется влияние
внутренней обратной связи по ЭДС ротора.
Отмеченное явление можно прокомментировать и иначе.
Ранее было показано,
что в асинхронном двигателе во всех
режимах работы вектор тока
![]() ориентируется перпендикулярно вектору
ориентируется перпендикулярно вектору
![]() .
Эта особенность не зависит от закона
частотного регулирования. Если выполняются
условия (2.66), то реакция ротора по
отношению к вектору
.
Эта особенность не зависит от закона
частотного регулирования. Если выполняются
условия (2.66), то реакция ротора по
отношению к вектору
![]() становится поперечной и компенсируется
полностью составляющей тока статора
становится поперечной и компенсируется
полностью составляющей тока статора
![]() .
.
Из структурной схемы
следует, что при выполнении условий
(2.65) потокосцепление ротора
![]() определяется лишь составляющей тока
статора вдоль оси х
определяется лишь составляющей тока
статора вдоль оси х
![]() .
(2.68)
.
(2.68)
Таким образом, при
векторном управлении асинхронный
двигатель может представлять собой 2-х
канальную систему, в которой устранены
все внутренние обратные связи. По каналу
“х” регулируется составляющая тока
статора
![]() ,
которая создаёт потокосцепление
,
которая создаёт потокосцепление
![]() .
По каналу “у” регулируется составляющая
тока статора
.
По каналу “у” регулируется составляющая
тока статора
![]() ,
создающая электромагнитный момент
,
создающая электромагнитный момент
![]() .
(2.69)
.
(2.69)