

4.2 Составление функциональной и структурной схем цифрового электропривода
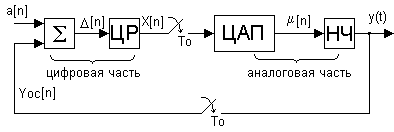
Рисунок 4.1 – Функциональная схема цифрового электропривода
На рисунке обозначены: a[n]
– код задания для
![]() ;
ЦР – цифровой регулятор в контуре
скорости;
;
ЦР – цифровой регулятор в контуре
скорости;
![]() – сумматор
– сумматор
![]() ;
;
![]() – код управляющего воздействия; y(t)
– аналоговый сигнал управляющего
воздействия; ЦАП – цифро-аналоговый
преобразователь; АЦП – аналогово-цифровой
преобразователь; НЧ – аналоговая
(непрерывная) часть цифрового
электропривода;
– код управляющего воздействия; y(t)
– аналоговый сигнал управляющего
воздействия; ЦАП – цифро-аналоговый
преобразователь; АЦП – аналогово-цифровой
преобразователь; НЧ – аналоговая
(непрерывная) часть цифрового
электропривода;
![]() – период квантования;
– период квантования;
![]() – код ошибки;
– код ошибки;
![]() – аналоговый сигнал обратной связи;
– аналоговый сигнал обратной связи;
![]() – код обратной связи; ОУ – объект
управления.
– код обратной связи; ОУ – объект
управления.
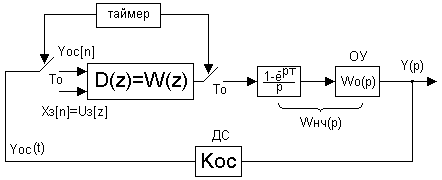
Рисунок 4.2 – Структурная схема цифрового электропривода
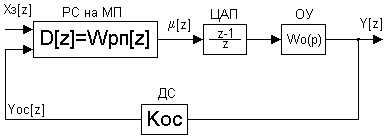
Рисунок 4.3 – Структурная схема РЭП в Z-преобразовании
4.3 Синтез регулятора скорости в цифровом электроприводе на основе технического оптимума
Синтез цифрового регулятора основан на оптимизации контуров управления аналоговых схем регулирования с дальнейшим преобразованием передаточных функций аналоговых регуляторов в передаточные функции цифрового регулятора на основании таблиц Z-преобразования.
Оптимизация аналоговых регуляторов осуществляется на основе идеи последовательной коррекции передаточной функции желаемой разомкнутой системы:
![]() (4.4)
(4.4)
где
![]() – передаточная функция непрерывной
неизменяемой части, в которую входят
двигатель, преобразователь и редуктор;
– передаточная функция непрерывной
неизменяемой части, в которую входят
двигатель, преобразователь и редуктор;
![]() – передаточная функция желаемой
разомкнутой системы.
– передаточная функция желаемой
разомкнутой системы.
![]() (4.5)
(4.5)
где
![]() – передаточная функция замкнутого
контура тока, тогда
– передаточная функция замкнутого
контура тока, тогда
![]() .
.
Желаемая передаточная функция разомкнутой системы составляется на основе технического оптимума:
![]() (4.6)
(4.6)
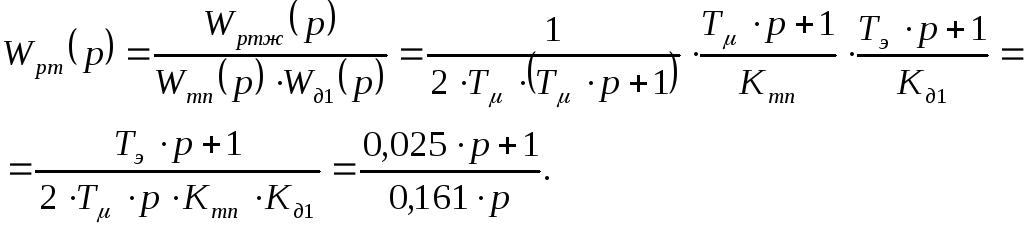
Отсюда можно определить передаточную функцию регулятора скорости:
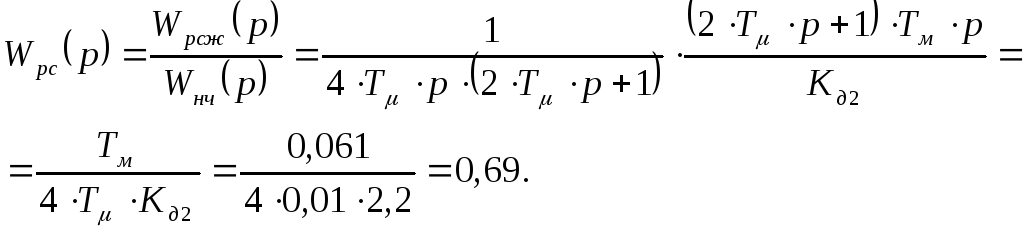 (4.7)
(4.7)
Таким образом регулятор скорости
представляет собой пропорциональное
звено системы автоматического управления
с коэффициентом передачи
![]() .
.
Передаточная функция для разомкнутого контура тока имеет вид:
![]() (4.8)
(4.8)
где
![]() – передаточная функция регулятора
тока;
– передаточная функция регулятора
тока;
![]() – передаточная функция тиристорного
преобразователя.
– передаточная функция тиристорного
преобразователя.
Передаточная функция разомкнутого контура тока составляется на основе технического оптимума:
![]() (4.9)
(4.9)
Отсюда определяется передаточная функция регулятора тока:
 (4.10)
(4.10)
Таким образом регулятор тока представляет собой ПИ-регулятор, состоящий из интегральной и пропорциональной части:
![]() (4.11)
(4.11)
Определим частоты сопряжения для построения ЛАЧХ для полученных контуров скорости и тока:
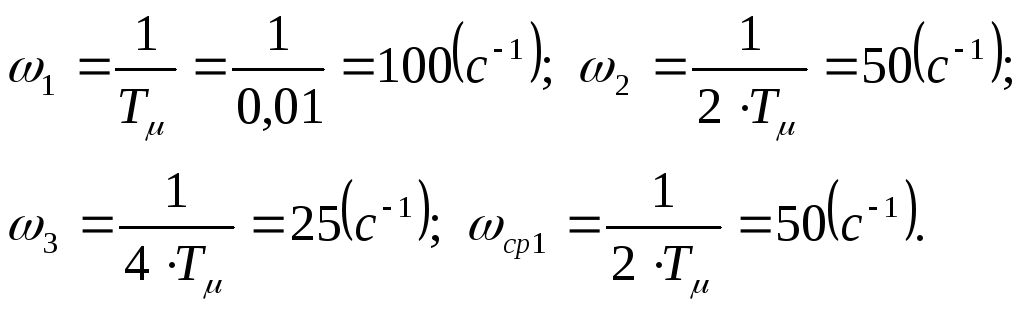 (4.12)
(4.12)

Рисунок 4.4 – ЛАЧХ контуров тока и скорости
На рисунке обозначены: 1 – ЛАЧХ регулятора тока; 2 – ЛАЧХ регулятора скорости.
4.4 Составление дискретной передаточной функции оптимального регулятора в соответствующем контуре
Пользуясь таблицей Z-преобразований получим дискретную передаточную функцию для регуляторов скорости и тока:
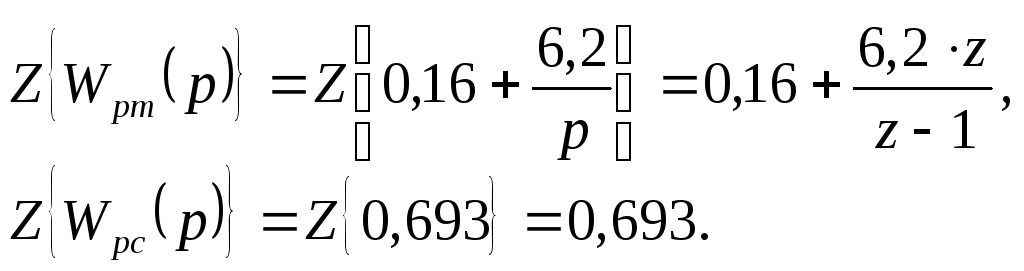 (4.13)
(4.13)
Для программной реализации регуляторы тока и скорости необходимо представить в разностных уравнениях:
![]() (4.14)
(4.14)
где
![]() – выходной сигнал регулятора;
– выходной сигнал регулятора;
![]() – входной сигнал регулятора.
– входной сигнал регулятора.
![]() (4.15)
(4.15)
Откуда получим:
![]() .
Представим полученное выражение в
конечных разностях:
.
Представим полученное выражение в
конечных разностях:
![]() ,
(4.16)
,
(4.16)
откуда
![]() .
.
Полученное выражение позволяет получить
значение выходного сигнала регулятора
![]() в любой момент времени
в любой момент времени
![]() ,
зная значение выходного сигнала в
предыдущий момент времени –
,
зная значение выходного сигнала в
предыдущий момент времени –
![]() ,
и значения входного сигнала –
,
и значения входного сигнала –
![]() и
и
![]() .
Т.е. регулятор может быть реализован
программно.
.
Т.е. регулятор может быть реализован
программно.
Проведя аналогичные преобразования для регулятора скорости, получим следующее:
![]() .
(4.17)
.
(4.17)