

1.3 Определение параметров якорной цепи электропривода
Активное сопротивление трансформатора, приведенное к цепи выпрямленного тока:
![]() (1.15)
(1.15)
где
![]() – число параллельных проводов,
– число параллельных проводов,
![]() – число фаз,
– число фаз,
![]() – выпрямленный ток.
– выпрямленный ток.
![]() (1.16)
(1.16)
![]() (1.17)
(1.17)
Индуктивное сопротивление трансформатора, приведенное к цепи выпрямленного тока:
![]() (1.18)
(1.18)
Сопротивление, вносимое за счет перекрытия анодных токов:
![]() (1.19)
(1.19)
Сопротивление щеточного контакта:
![]() (1.20)
(1.20)
Индуктивность трансформатора, приведенная к контуру двигателя:
![]() (1.21)
(1.21)
Индуктивность двигателя:
![]() (1.22)
(1.22)
где
![]() – коэффициент индуктивности для
компенсированных машин,
– коэффициент индуктивности для
компенсированных машин,
![]() – число полюсов,
– число полюсов,
![]() – угловая скорость двигателя.
– угловая скорость двигателя.
![]() (1.23)
(1.23)
Активное сопротивление сглаживающего дросселя:
![]() (1.24)
(1.24)
Расчетное активное сопротивление цепи якоря:
![]() (1.25)
(1.25)
Предельный угол регулирования:
![]() (1.26)
(1.26)
где
![]() ,
,
![]() .
.
![]() (1.27)
(1.27)
где
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
![]() .
(1.28)
.
(1.28)
![]() .
(1.29)
.
(1.29)
По
![]() определяем относительную величину
эффективного значения первой гармоники
выпрямленного напряжения –
определяем относительную величину
эффективного значения первой гармоники
выпрямленного напряжения –
![]() .
.
Индуктивность сглаживающего дросселя:
![]() (1.30)
(1.30)
Расчетная индуктивность якорной цепи:
![]() (1.31)
(1.31)
Электромагнитная постоянная времени:
![]() (1.32)
(1.32)
Электромеханическая постоянная времени:
![]() (1.33)
(1.33)
1.4 Построение статических характеристик тиристорного преобразователя
Регулировочная характеристика
преобразователя при условном холостом
ходе может быть построена по уравнению
![]() .
.
Зависимость напряжения на якоре
электродвигателя в функции угла
регулирования преобразователя при
неизменном (номинальном) моменте на
валу может быть определена с помощью
уравнения
![]() .
.
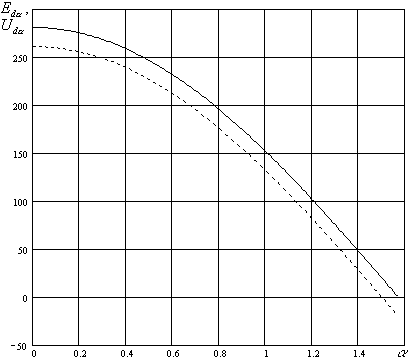
Рисунок 1.1 – Регулировочные характеристики
преобразователя при условном холостом
ходе
![]() и номинальной нагрузке электродвигателя
и номинальной нагрузке электродвигателя
![]()
Характеристика «вход-выход» преобразователя
![]() может быть построена при известной
регулировочной характеристике системы
управления тиристорами
может быть построена при известной
регулировочной характеристике системы
управления тиристорами
![]() и по регулировочной характеристике
и по регулировочной характеристике
![]() путем последовательного перестроения.
путем последовательного перестроения.
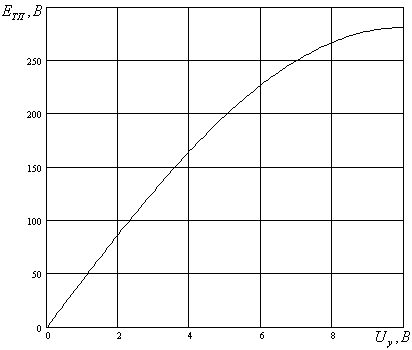
Рисунок 1.2 – Характеристика «вход-выход»
преобразователя
![]()
По полученной характеристике определяем коэффициент передачи преобразователя:
![]() (1.34)
(1.34)
1.5 Выбор и краткое описание комплектного тиристорного преобразователя
По результатам расчетов и построенной статической характеристике выбираем источник питания на базе КТП – нереверсивную трехфазную тиристорную станцию управления двигателями типа ШУВ3502-1АУ4. Станция имеет мостовую силовую схему, рассчитана номинальный выпрямленный ток до 50 А, номинальное выпрямленное напряжение до 230 В. КТП типа ШУВ 3000 представляет унифицированную серию, в которой использован блочный способ построения силовых цепей и функциональных узлов управления, что позволяет комбинацией блоков получить широкий класс РЭП мощностью до 200 кВт и диапазоном регулирования от 20 до 2000.
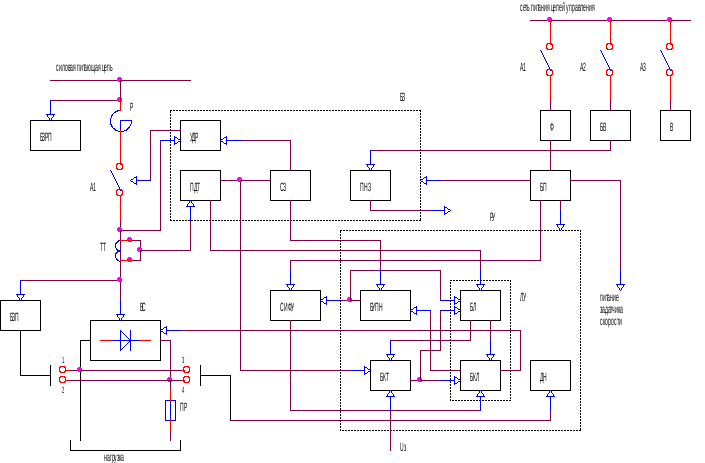
Рисунок 1.3 – Структурная схема КТП серии ШУВ3000
Р – токоограничительные реакторы; БЗРП – блок защиты сети от радиопомех; А1-А4 – автоматические выключатели; ТТ – трансформаторы тока; БЗП – блок защиты от перенапряжений; ВС – вентильная секция; ПР – предохранитель; БЗ – блок защиты; УДР – узел управления дистанционным расцепителем; ПДТ – панель датчика тока; СЗ – сеточная защита; ПНЗ – панель нулевой защиты; РУ – регулирующее устройство; БУПН – блок усилителя полупроводникового нереверсивного; БКТ – блок коррекции и токоограничения; ЛУ – логическое устройство; БЛ – блок логики; БКЛ – блок ключей; ДН – датчик напряжения; Ф – фильтр сетевого напряжения; БП – блок питания; БВ – блок возбуждения двигателя; В – вентилятор.
Станция управления состоит из регулируемого
тиристорного выпрямителя, выполненного
по мостовой трехфазной схеме, а также
блоков управления и регулирования,
обеспечивающих создание автоматизированного
регулируемого электропривода постоянного
тока. Блок БЛ преобразует реверсивный
сигнал
![]() в однополярный для управления нереверсивным
усилителем. Введение блокировки по
выходному напряжению усилителя позволяет
переключать импульсы только при нулевом
напряжении усилителя, соответствующем
в однополярный для управления нереверсивным
усилителем. Введение блокировки по
выходному напряжению усилителя позволяет
переключать импульсы только при нулевом
напряжении усилителя, соответствующем
![]() ,
что исключает броски тока при реверсе
и торможении привода. При смене полярности
задающего напряжения
,
что исключает броски тока при реверсе
и торможении привода. При смене полярности
задающего напряжения
![]() меняет знак, давая БЛ команду на
переключение ключей, однако БЛ не
изменяет своего состояния из-за наличия
блокировок по току и напряжению усилителя.
Начинается быстрый спад напряжения на
выходе усилителя и тока в силовой цепи.
меняет знак, давая БЛ команду на
переключение ключей, однако БЛ не
изменяет своего состояния из-за наличия
блокировок по току и напряжению усилителя.
Начинается быстрый спад напряжения на
выходе усилителя и тока в силовой цепи.