

-
Алгоритм, основанный на принципе деревьев состояния.
-
Этот алгоритм основан на последовательном анализе отдельных ТМ-их параметров и анализе результатов отдельных промежуточных вычислений обобщённых параметров. Поиск состояния БС разветвляется в зависимости от поэтапных результатов анализа.
-
[p1, …, pi]

-
Ck=f(p1, p2, p3) – обобщённый параметр
-

-
[C1, …, Cj]
-
Алгоритм, основанный на мат. моделях
-
Этот алгоритм заключается в тактовом сравнении совокупности ТМ параметров, получаемых с модели и с борта КА. Модель КА в этом случае работает параллельно с работой БС. При совпадении данных из ТМИ и с борта КА с данными модели делается вывод о нормальном функционировании БС. Если данные не совпадают, то проводится анализ причин несовпадения.

-
Алгоритм, основанный на матрицах состояния
-
Алгоритм контроля с помощью матриц состояния использует тот факт, что состояние система КА в любой момент времени можно определить как совокупность значений его ТМ параметров и промежуточных вычислений. При этом считается, что каждый параметр может принимать значения из конечного числа диапазонов.
-
[p1, …, pi] & [C1, …, Cj]
-


-
...
-
...
-
...
-
...
-
...
-
...
-
...
-
...
-
...
-
...
-
...
-
...
-
...
-
...
-
...
-
-
 – сравниваем с
матрицей состояния
– сравниваем с
матрицей состояния -
-
Билет №22



















-
Дополетное планирование
-
Дополётное и оперативное планирование
-
(на этапе проектирования)
-
Исходный план – номинальный план полёта (НПП).
-

-
Чем больше мы знаем о ВВ, тем выше возможность сохранять НПП. Если ВВ Преобладает, то мы меняем НПП на НПП I.
-
Уровни планирования
-
Высший уровень
-
Стратегическое планирование
-
Тактическое планирование
-
-
Стратегическое планирование:
Полётное задание
-
формируется цель
-
средства и способы достижения цели
-
определяются ресурсы
-
ограничения
-
Тактическое планирование:
-
Общий план полёта – среднесрочное планирование
-
Детальный план полёта – детальное планирование
-
ОПП и ДПП:
-
последовательность
-
методы выполнения
-
использование тех. средств
-
программа обмена информацией
-
точная временная привязка
-
Методология планирования
-

-
Управление полетом при возникновении нештатных ситуаций.
-
Виды оперативных решений по управлению полётом, принимаемых в нештатных ситуациях.
-
Повторение ранее выданных команд управления, если они не исполняются на КА;
-
Переход на резервный комплект отказавшего прибора (использование бортового структурного резервирования);
-
Переход на резервный режим работы бортовой системы (использование бортового функционального резервирования);
-
Прекращение текущей операции;
-
Перенос запланированной операции;
-
Изменение целей полёта.
-
Рассматриваемые и нерассматриваемые нештатные ситуации.
-
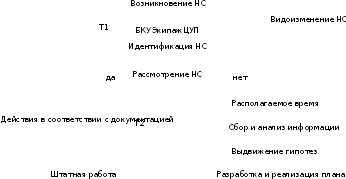
Нештатные ситуации, признаки которой и пути выхода из которых описываются заранее, называются рассматриваемыми нештатными ситуациями. Нерассматриваемые нештатные ситуации – те нештатные ситуации, которые не отрабатывались на наземных моделирующих средствах и не отражённые в полётной документации.
-
Схема действия в нештатной ситуации.
-
-

-
 , где
, где
 – время наступление необратимых
последствий.
– время наступление необратимых
последствий. -
-
Билет №23
-
Бортовая датчиковая аппаратура. Контролируемые параметры и способы их контроля
-
КПКА играет роль обратной связи (ОС), с помощью которой оценивается способность КА к выполнению поставленных перед ним задач, правильность его реакции на выдаваемое УВ (упр-ее возд-ие), результаты выполнения программы полёта.

-

-
Классификация параметров, описывающих процессы, происходящие на борту КА
-
Параметры:
-
Наблюдаемые:
-
Ненаблюдаемые:
-
Управляемые
-
(температура)
-
Неуправляемые (радиация)
-
(труднонаблюдаемые: усталости, микротрещины и т.п.)
-
-
-
Источники информации о процессах на борту КА
-
Основной источник – ТМИ. Кроме того может быть использована телевизионная информация (ТВИ), доклады экипажа, информация со спецаппаратуры (Радиоконтроль орбиты).
-
Датчик выполняет преобразование измеряемого параметра в электрический сигнал (0÷6,2В).
-
Многообразию измеряемых параметров соответствует множество различных типов датчиков: тензометрические, пьезоэлектрические, термопары, терморезисторы и т.д.
-
Совокупность телеметрических датчиков, преобразующих, коммутационных и передающих устройств образуют на борту КА радиотелеметрическую систему (РТС).

-
РТС в режиме передачи информации на Землю работает обычно в 2-х режимах: непосредственная передача и воспроизведение ранее записанной информации.
-
РТС по способу сбора ТМИ:
-
циклические
-
адресные
-
адаптивные
-
адаптивно-адресные
-
Циклические РТС:
-
с частотным разделением каналов
-
с временным разделением каналов
-
Частотное разделение каналов предполагает выделение определённой частоты для каждого измерителя каналов в общем спектре частот.
-
Временное разделение каналов предполагает поочерёдную передачу сигнала в строго определённой временной последовательности.
-
Такая совокупность называется телеметрическим кадром (ТМК).
-
Начало и конец ТМК отмечается определённым сигналом – стробом. Внутри кадра каждому каналу определяется временной интервал.
-

-
В адресных РТС каждому датчику присваивается определённое имя. В этом случае в информационном коде указывается имя датчика, время и значащая часть.
-
В рамках адаптивных РТС на Землю передаётся информация только о значащих изменениях параметров.
-
Наиболее сложной, но обладающей широкими возможностями, является адаптивно-адресная система. В её рамках может осуществляться управление составом измеряемых параметров, управление величинами критериев значимости параметров, регулирование частоты опроса измеряемых параметров.
-
Информативность РТС зависит от числа опрашиваемых датчиков, частоты их опроса, точности измерения параметров. РТС разделяются на малоинформативные, среднеинформативные и многоинформативные.
-