

6О. Момент инерции тела. Теорема Штейнера.
I![]() zi=
zi=![]() mi*zi2
mi*zi2
Iz=![]() mi*zi2
mi*zi2
Момент инерции
тела отн-но некот-ой оси есть сумма
моментов инерции отдельных частиц ,
сост-щих это тело. В пределе, когда число
разбиений ![]() :
:
Iz=![]() 2dm
2dm
где суммирование ведётся по всей массе тела.
dm=![]() dV
dV
Iz=![]() 2dxdydz
2dxdydz
r2=x2+y2+z2
Сопоставим ур-ие дв-ния поступ-го и вращ-го дв-ния.
Fs=ms*as
Mz=Iz*![]()
Момент инерции тела во вращ-ом дв-нии аналогичен массе в пост-ом дв-нии. Т.е. момент инерции тела есть мера инертности тела во вращ-ом дв-нии.
Масса-мера инертности тела в пост-ом дв-нии. Инертность – cв-во тела сохр-ть сост-ие покоя или равно-го прямолин-го дв-ния в отсутствии действия сил. Во вращ-ом дв-нии если тело имеет большой момент инерции, то тело стрем-ся сохр-ть сост-ие покоя или равном-го вращения.
Рассмотрим моменты инерции тел в простейших случаях.
1.момент инерции точки массы m на раст-нии r от оси есть величина
Iz=mr2 [Iz]=кг*м2
2. момент ин-ции однородного кольца или полого цилиндра
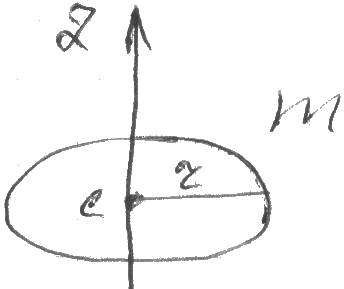
![]() Iz=mr2
Iz=mr2
3. диск или сплошной цилиндр
![]()
![]() Iz=
Iz=![]() mr2
mr2
4. момент инерции шара
![]() Iz=
Iz=![]() mr2
mr2
5. момент инерции стержня
![]() Iz=
Iz=![]() ml2
ml2
6. момент инерции стержня отн-но оси, прох-щей через его конец
![]() Iz=
Iz=![]() ml2
ml2
Момент инерции тела не зависит от вращения тела. Зависит от формы тела, его размеров, распределения плотности массы в теле и от выбора оси.
Центром инерции тела (центром масс, центром тяжести) наз-тся т. с радиус-вектором
![]()
где суммир-ние ведётся по всем частицам тела.
![]()
ri-радиус вектора i-ой частицы
В проекции на координатные оси имеем
![]()
![]()
![]()
Т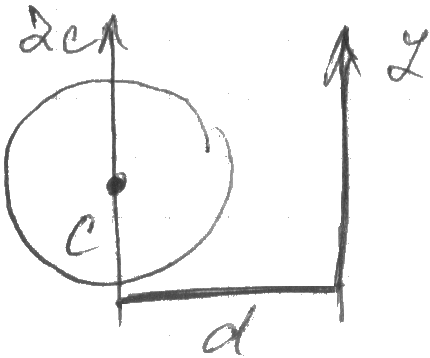 -ма
Штейнера: момент инерции тела отн-но
оси z
равен моменту ин-ции тела отн-но
-ма
Штейнера: момент инерции тела отн-но
оси z
равен моменту ин-ции тела отн-но![]() -ой
оси zc
, прох-щей через центр инерции тела,
сложенному с произв-ем массы тела m
на квадрат расст-ия d
между осями.
-ой
оси zc
, прох-щей через центр инерции тела,
сложенному с произв-ем массы тела m
на квадрат расст-ия d
между осями.
Iz=Izc+md2
Д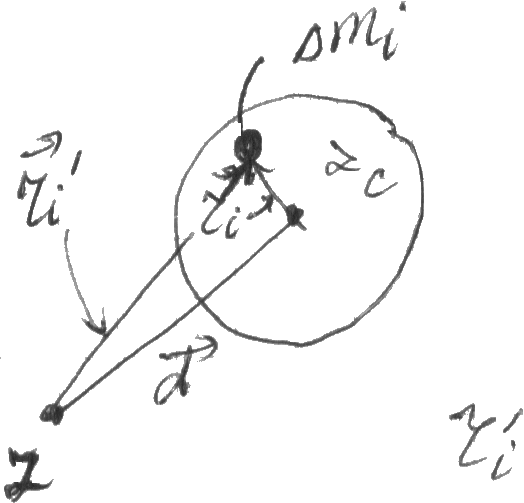 ок-во:
пусть ось z
неподвижна так, что траект-ии всех
частиц тела лежат в
ок-во:
пусть ось z
неподвижна так, что траект-ии всех
частиц тела лежат в ![]() пл-стях. Ось z
проходит через центр тела. Расст-ие
между осями d.
пл-стях. Ось z
проходит через центр тела. Расст-ие
между осями d.
Из рисунка
![]() =
=![]() +
+![]()
Возведём 2 этих части в квадрат
![]() =
=![]() +d2+2
+d2+2![]()
Домножим обе части
на ![]() и просуммируем по всем элементам тела
и просуммируем по всем элементам тела
![]()
![]()
![]()
![]() (по определению радиус-вектора центра
инерции)
(по определению радиус-вектора центра
инерции)
Iz=Izc+md2
Ч.Т.Д.
Между кинематикойи динамикой пост-го и вращ-го дв-ния сущ-ют сходства:
|
Поступ. |
Вращ. |
|
|
|
|
|
|
|
а |
β |
|
m |
Iz |
|
P=m |
Lz= |
|
F |
Mz (момент силы) |
|
F=ma |
Mz=Iz |
|
|
|
7О. Закон сохранения импульса.
Рассмотрим систему мат-ых т. , сост-щую из n точек. Силы, действующие между т-ми системы наз-ся внутренними. Прочие – внешними.
Система наз-тся замкнутой (изолированной) если отсутствуют внешние силы.
Пусть на i-ую
точку системы действуют внешние силы
с равнодействующей ![]() и внутренней силой
и внутренней силой ![]() .
.
По 2-му з.Ньютона имеем ур-ие дв-ния для m мат-ых точек.
![]()
![]() =
mi
=
mi![]()
k![]() i
означает, что нет самодействия
i
означает, что нет самодействия
![]() =
=![]() =….=0
=….=0
Проссумируем ур-ие 1 по всем точкам системы.
![]()
![]()
Слагаемое = 0, т.к.
по 3 з. Ньютона ![]() =
=![]()
Поэтому в сумме
(3) ![]() =
=![]() ;
;
![]() =
=![]() и т. д. поэтому она =о
и т. д. поэтому она =о
![]()
Импульсом системы тел (точек) наз-тся векторная сумма импульсов отдельных точек системы.
![]()
Закон изменения импульсов системы
![]()
Производная по времени от вектора импульса системы точек (тел) равна вект-ой сумме всех внешних сил, приложенных к системе.
Если внешних сил
нет (![]() =0),
то
=0),
то ![]() =0,
тогда
=0,
тогда ![]() =соnst.
=соnst.
Закон сохранения импульса системы : импульс замкнутой системы мат-ых точек (тел) сохраняется.
m![]() 1
1![]() 1+
m2
1+
m2![]() 2+….=
m1
2+….=
m1![]() 1+
m1
1+
m1![]() 1+….
1+….
ЗСИ применим также в теории относительности
З![]() СИ
связан с однородностью пространства,
т.е. симметрии законам физики по
отношению к пространственным сдвигам
начала координат (по отн-ию к трансляциям).
СИ
связан с однородностью пространства,
т.е. симметрии законам физики по
отношению к пространственным сдвигам
начала координат (по отн-ию к трансляциям).
В однородном
пр-стве ![]() перенос замкнутой системы как целого
не меняет законов дв-ния системы. Пустое
пр-ство однородно.
перенос замкнутой системы как целого
не меняет законов дв-ния системы. Пустое
пр-ство однородно.
Покажем теперь,
что поступ-ое дв-ние тела можно заменить
дв-ем центра масс тела, т.е. дв-ем одной
точки. Пусть тело массой М поступ-но
движется со скоростью ![]() .
Радиус-вектор центра масс тела
.
Радиус-вектор центра масс тела
![]()
mi – масса i-ой частицы тела
ri – радиус-вектор i-ой частицы
Продифф-ем rc по t
![]()
![]()
![]()
Возьмем производную
![]()
![]()
![]()