

1-41
.pdf1.Строительная механика. Её задачи и методы.
Строймех - наука о принципах и методах опр-ния в инж-ных сооружениях внутр. сил и перемещений, вызванных разнообразными статич. и динамич. нагрузками и воздействиями.
Осн. задачи строит. мех.: разработка методов опр-ния внутр. усилий в частях сооружений от различных нагрузок и воздействий, разработка методов опр-ния деформаций и перемещений; изучение законов образования сооружений, исследование условий устойчивости сооружений, исследование взаимодействия с ОС, исследование изменений в напря- женно-деформированном состоянии сооружений при длительной их эксплуатации.
В практическом отношении наиболее полно разработана так называема прямая задача: опр-ние напряженно-деформированного состояния сооружения при заданных нагрузках и воздействиях. Заданы расчетная схема, св-ва материалов и размеры.
Обратная задача: по заданным нагрузка, воздействиям, будущим габаритам конструкции опр-ть его конст. схему. материал и размеры. Для решения задач строймех исп-ет термех, вышку, информатику. СМ разрабатывает и применяет экспериментальные(Э) и теоретические(Т) методы. ЭМ базируются на испытании образцов, моделей и натурных сооружений. ТМ СМ подразделяются на графические, аналитические и численные.
2. Понятие о расчётной схеме сооружений(РСС). Линейно деформируемые системы (ЛДС)
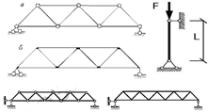
РСС п. с. упрощенное изображение действительного соор-я, она должна отражать действительную работу соор-я и по возможности облегчить процесс расчета и анализ результата расчета. В зав-ти от соот-ия геом. размеров различают след. осн-ые типы эл-ов: стержни, оболочки, пластинки, массивы, тонкостенные стержни, узлы и опоры. Если вза-
имосвязь между внеш. нагрузкой и вызванными системой внутр-ми силами и перемещениями подчиняются закону прямой пропорциональности, то такое соор-е наз. ЛДС. В ЛДС деф-ции и перемещения д.б. малы и ими пренебрегают. Напряженно-деформированное состояние ЛДС описывается линейными дифференц-ми или линейно алгебраическими ур-
ями.
3. Основные элементы расчётных схем сооружений: стержни, узлы, опоры.
В зав-ти от соот-ия геом. размеров разл-ют след. осн-ые типы эл-ов: стержни, оболочки, пластинки, массивы, тонкостенные стержни , узлы и опоры.
<=Стержень-прямолинейный или криволинейный пространственный эл-т, у к-го один размер >> два других. Оболочка-пространственный эл-т один размер к-го <<др-х, если он ограничен двумя кривыми пов-ми, или пластинками, если ограничен двумя плоскостями. Массив - эл-ты ОС у к-го все три размера одного порядка.
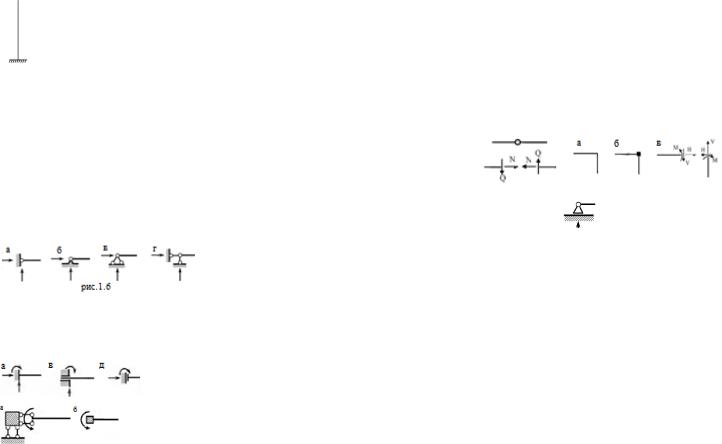
Тонскостенными наз. стержни у к-х все осн-ые размеры имеют разные порядки. Отдельные эл-ты объединяются в единую систему посредством узловых соед-ий или просто узлов. Узлы м.б. шарнирными 1 или жесткими 2(а,б,в):
Ш-П опора ограничивает только одно линейное перемещение в заданном направ-  лении:
лении:
Если в соор-ии возможны большие перемещения, то изображают так Ш-Нп опора устраняет любые линейные смещения и допускает
только свободный поворот отн-но оси опорного шарнира(1.6). Ш-Нп опора (1.6 а, б) эквивалентна двум простым опорным стержням (1.6 в, г).
Защемляющая н-п опора (жесткая заделка1.7а) не допускает ни линейных ни угловых перемещений. Защемляющая подв. опора оставляет свободу одного линейного перемещения (1.7в,д)
Плавающая заделка устраняет только угловое перемещение. Возникает только один реактивный момент.
4. Число степеней свободы (СС) и число лишних связей.
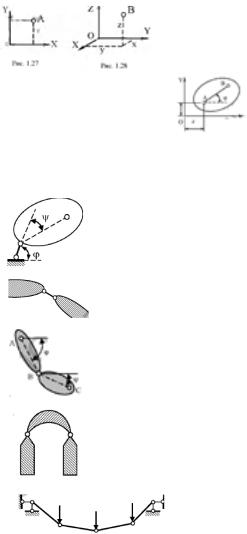
СС наз. Кол-во независимых геом-их параметров, опр-щих положение тела или системы тел при их дв-ии на плоскости или в пространстве.
Положение на плоскости подвижной материальной точки хар-ся двумя ее коорд-ми отн-но произвольной неподвиж. системы отсчета, расположенной в той же пл-ти(1.27).Сл-но точ-
ка обладает двумя СС.
В пространстве хар-ся 3 координатами и точка в пространстве имеет
3 СС(1.28)
|
Положение подвижного плоского тела(диска) на пл-ти |
хар-ся тремя неза- |
висимыми параметрами ,например коор-ми х и у, м углом |
наклона φ прямой |
принадлежащей диску. |
Всякое устройство, |
уменьшающее СС тела или системы тел на единицу наз. |
простой связью. Сущ-ет 3 осн-ых вида связей: к связям 1-го вида отн-ся простые связи, устраняющие одну СС. К связям 2-го вида отн-ся связи эквивалентные 2-м простым связям, устраняющие 2 СС. Связи 3-го вида устраняют 3 СС. Они хар-ся тремя реакциями. Ш-П опора экв-на связи 1-го рода. Система из диска и стержня
опорного имеет 2 СС.
Система из двух дисков соед-ых одним стержнем теряет 1 сс, т.е. рассматривается как простая связь.
Соединяя два диска шарниром сс =4 ,вместо первоначальных 6(а).
Система из 3-х дисков и 2-х шарниров имеет 5 СС, вместо 9
Общая СС равна: W=3Д-3Ж-2Ш-С0 (Д-диски, Ж-жесткие стыки, Ш- гарнир, С0-опорные связи). Если W>0, то система ГИ. При-
мерW=3Д-2Ш-С0=3*4 - 2*3-4=2=>ГИ Если W=0,то система ГН и СО, если W<0, то система ГН, но СН. Количество лишних связей: Л= -W.
5. Системы неизменяемые, изменяемые и вырожденные (мгновенно изменяемые); статически определимые и неопределимые.
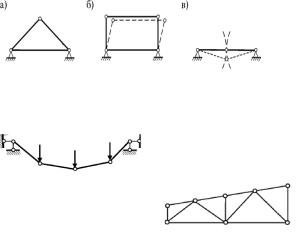
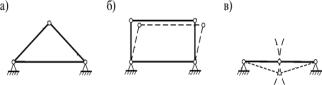
Геометрически неизменяемая система (ГНС)– это система, перемещения которой возможны только при деформации ее элементов. Простейшей ГНС является шарнирный треугольник (а).
Геометрически изменяемая система (ГИС) – это система, элементы которой могут получать перемещения даже без их деформаций. Например, изменяемой является шарнирный четырехугольник (б).
Мгновенно изменяемая система (МИС) – система, способная получать лишь мгновенные перемещения (в).
Общая сс равна: W=3Д-3Ж-2Ш-С0 (Д-диски, Ж-жесткие стыки, Ш-гарнир, С0-опорные связи). Если W>0, то система ГИ. ПримерW=3Д-2Ш-С0=3*4 - 2*3-4=2=>ГИ
|
|
Если W=0, то система ГН и СО. Если W<0, то система ГН, но СН. |
|
|
Количество лишних связей: Л= -W. |
Если |
в системе |
отсутствуют опорные стержни, то СС выч-ся из ф- |
лы: |
V=3Д-3Ж- |
2Ш-3, V=3Д-3Ж-2Ш-3 = 3*13-0-2*18-3=0. |
6.Кинематический анализ.
Главное требование: перемещения сооружения должны быть малыми. Решением этой задачи на начальном этапе проектирования занимается специальный раздел строительной механики, называемый кинематическим анализом.
Кинематический анализ – это анализ геометрической структуры сооружения с целью исключения больших перемещений. При кинематическом анализе внешняя нагрузка обычно не рассматривается, а элементы системы считаются достаточно жесткими.
Цель кинем. анализа состоит в том, чтобы выяснить:
-способны ли структурные системы воспринимать передаваемую на них нагрузку без существенного изменения приданной им геом-ой формы,
-каким д.б. соотношение между числом дисков и числом связей, и каким д.б. их взаимное расположение,
-какова последовательность и трудоемкость расчета по определению реакций внутренних сил и перемещений в эл-ах соор-ия.
Геометрически неизменяемая система (ГНС)– это система, перемещения которой возможны только при деформации ее элементов. Простейшей ГНС является шарнирный треугольник (а).
Геометрически изменяемая система (ГИС) – это система, элементы которой могут получать перемещения даже без их деформаций. Например, изменяемой является шарнирный четырехугольник (б).
Мгновенно изменяемая система (МИС) – система, способная получать лишь мгновенные перемещения (в).
7. Виды нагрузок. Свойства и методы расчёта статически определимых систем.
По времени действия нагрузки делятся на постоянные (действующие на конструкцию в течение всего времени эксплуатации конструкции) и временные.
В свою очередь временные нагрузки принято разделять на длительные и кратковременные.
нагрузки дополнительно разделяются на статические (силы, приложенные с минимальным ускорением или с ускорением, стремящимся к нулю) и динамические (для них характерна относительно большая скорость приложения). Для см наиболее важным является деление на подвижные и ударные нагрузки, на сосредоточенные и распределенные.
СОС наз. системы, у к-х все внутренние силы м.б. определены только из уравнений равновесия. При этом система рассматривается как тв-ое тело. Осн-ые св-ва СОС:
1.СОС не имеет лищних связей ,т.е. W=0. 2.Усилия в СОС не зав-ят от упругих св-в материалов и размеров сечений эл-ов.
3.Изменение температуры, осадка опор, незначительное отклонения в длинах эл-ов не вызы-
вают в СОС дополнительных усилий.
4.Заданной нагрузке в СОС соот-ет единственно возможная картина распределения усилий.
5.Самоуравновешенная нагрузка, приложенная к локальной части системы, вызывает усилия в эл-ах только этой части. В остальных эл-ах системы усилия =0.
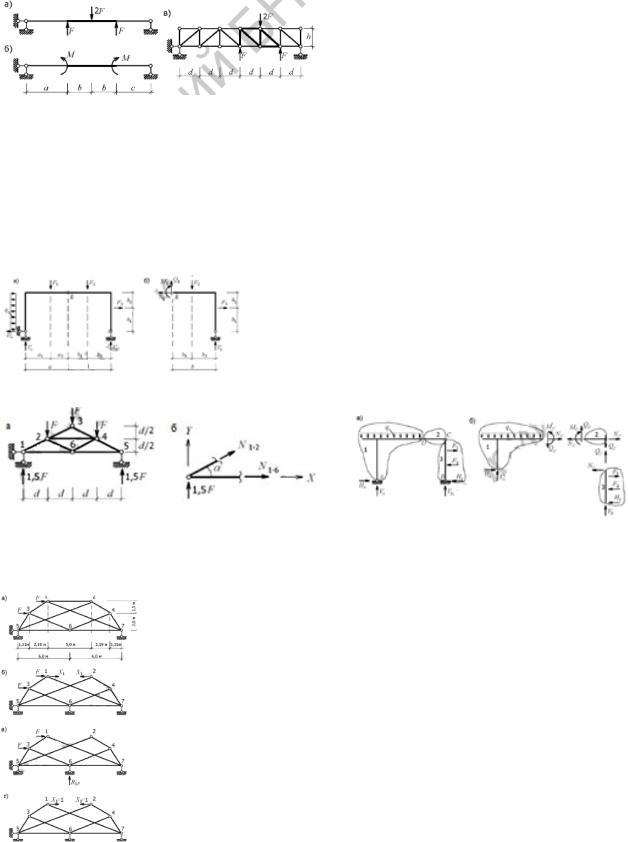
Методы расчета: 1.Метод сечений. Для определения усилий применяются уравнения равновесия отсеченной части, которые м.б. записаны в любом из трех видов: ΣХ=0, ΣY=0,
ΣMc1=0; ΣХ=0, Σ Mc1=0, ΣMc2=0; ΣMc1=0, ΣMc2=0, ΣMc3=0.
Пример: ΣХправ=F3-Nk=0, ΣYправ=Vв-F2+Qk=0, ΣMk=Vвb-F2b1+F3h2-Mk=0
Частным случаем способа простых сечений явл-ся способ вырезания узлов. Составляя уравнения равновесия на оси Х и У , получаем наши усилия: N1-2=-1.5√5F, N1-6=3F
Дальнейшее расширение этого способа явл-ся разделение рамы на составные части.
2. Метод замены связей Суть метода состоит в том, что одна из связей заданной системы удаляется, а ее действие
заменяется неизвестной силой Х.
Пример: Находим R1F=0,4023F. затем от сил Х=1найдем r11=0.1380. r11X1+R1F=0. Из ур-ия найдем Х1: X1= -R1F/r11= -2.915F. усилия мож-
но вычислить по ф-лу: Ni-k= Ni-k,F+Ni-k,lX1
3. Кинематический метод: основан на исп-ии принципа возможных пе- ремещений,к-й позволяет получить необходимые условия равновесия системы. Принцип возможных перемещений устанавливает общее условие равновесия деформируемой системы: если система нах-ся в равновесии под действием приложенных к ней внешних сил,то при всяком возможном бесконечно малом перемещении точек этой системы сумма работ ее внешних и внутренних сил=0. Wвозм+Авозм(внутр)=0, где
Wвозмвозможная работа внешних сил; Авозм(внутр)- возможная работа внутренних сил. Рассматривая усилие в удаленной связи как внешнюю силу, ур-ие возможных работ всех сил (ур-ие Лагранжа) имеет вид: Wвозм=Siδi+ΣFk∆k=0, где Siискомое усилие в связи i; δiперемещение по его направлению; Fk- k-я обобщенная сила; ∆k- перемещение по направлению силы Fk.
Например:
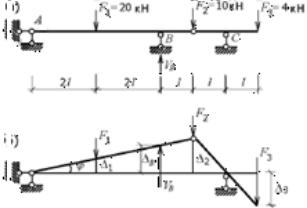
Определяя реакцию VB в опоре В двухпролетной СО балки (рис) удалим опорную связь в т.В и приложим в этой точке неизвестную силу VB. Положение механизма с одной сс опр-ся одним параметром –углом поворота φ, т.к. φ явл-ся бесконечно малым углом, то ∆1=2lφ, ∆в=4lφ, ∆2=5lφ, ∆3=5lφ, то уравнение работ запишем в виде
Wвозм= Vв4lφ-F1*2lφ-F2*5lφ+F3*5lφ=0. Решение дает Vв=17,5 кН
8. Виды подвижных нагрузок. Понятие об особенностях расчёта на подвижную нагрузку.
Подвижной наз. нагрузка, к-я перемешается по сооружению, не меняя направления действия. Примерами таких нагрузок явл-ся давление от колес авто, поездов, ж/д составов и т.п. По своей природе подвижная нагрузка явл-ся динамической. Статический расчет соор-ий на действие подвижных нагрузок выполняется с помощью линий влияний усилий. ЛВ усилия-графическое изображение изменения усилия в определенном эл-те соор-ия при перемещении по соор-ию единичной силы постоянного направления. При построении ЛВ некоторого усилия или реакции рассматривается произвольное положение на соор-ии един-й силы. Для этого сост-ся ур-ия равновесия. Из ур-ий равновесия получают функциональную зав-ть рассматриваемого усилия от абсциссы положения силы. График этой завти и представляет искомую ЛВ. ЛВ представляет собой график, характеризующий изменение конкретного усилия в одном строго определенном сечении соор-ия в зав-ти от положения подвижной ед-ой сосредоточенной силы.
ЛВ усилий позволяют:
-опр-ть значения усилий от нагрузок при любом их положении;
-находить наиболее невыгодные расположения нагрузок на соор-ии с целью пор-ия экстремальных (min и max) усилий.
9. Линии влияния и методы их построения.
Статический расчет соор-ий на действие подвижных нагрузок выполняется с помощью линий влияний усилий.
ЛВ усилия-графическое изображение изменения усилия в определенном эл-те соор-ия при перемещении по соор-ию единичной силы постоянного направления. При построении ЛВ некоторого усилия или реакции рассматривается произвольное положение на соор-ии един-й силы. Для этого сост-ся ур-ия равновесия. Из ур-ий равновесия получают функциональную зав-ть рассматриваемого усилия от абсциссы положения силы. График этой завти и представляет искомую ЛВ. ЛВ представляет собой график , характеризующий изменение конкретного усилия в одном строго определенном сечении соор-ия в зав-ти от положения подвижной ед-ой сосредоточенной силы.
ЛВ усилий позволяют:
-опр-ть значения усилий от нагрузок при любом их положении;
-находить наиболее невыгодные расположения нагрузок на соор-ии с целью пор-ия экстремальных (min и max)усилий.
Сущ-ет два метода построения ЛВ: статический и кинематический.