

1-41
.pdf26. Расчёт комбинированных систем
Комбинированными называют системы, часть элементов которых работает на изгиб, сдвиг и растяжение-сжатие, а другая частьтолько на растяжение-сжатие. Например: балка с
гибкой аркой (рис.6.3а), трехшарнирная арка с затяжкой (рис.6.3б), трехшарнирная рама с затяжкой (рис.6.3в), трехшарнирная рама со шпренгелем
(рис.6.3г).
рассмотрим шпренгельную балку. Опорные реакции
в ней Vа=Va0=3/8 ql, Vв= Vв0= 1/8 |
ql. Проводим |
сечение I-I: ΣМс лево=0, Н=Va l/2f- |
ql2/8f= |
ql2/16f= Mc0/f. ΣX лево=0 -> Nc=-H. |
Продольные |
усилия в наклонных элементах |
шпренгеля и |
стойках получаем, вырезая узел D и |
G: Т=Н/cosa; |
U=-Htga. Гибкие элементы заменяем |
их действие |
внешними силами, и рассчитываем |
ее как про- |
стую балку с учетом Va, Vв, T, U. |
Или сечение |
II-II отсечь часть шпренгельной бал- |
ки и из усло- |
вий ее равновесия с учетом усилий в |
рассеченных |
элементов получить аналитические |
выражения |
неизвестных усилий. Для любого |
сечения, |
находящегося на расстоянии х от |
левой опоры, |
изгибающий момент: Мх= Va x- |
qx2/2 –Hy= |
Mx0-Hy. |
|
Из уравнений ΣY= 0 и ΣX=0 нахо- |
дим: Nx=H, |
Qx=Va-qx-Htga=Qx0-Htgax |
|
На участках балки АЕ и FВ |
ах=а, у=у(х), а |
на участке ЕF ах=0, у=f. По выраже- |
ниям Мх, Nx, |
Qx можно построить эпюры М, N, |
Q. |
27. Перемещения и их обозначения
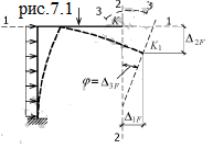
При действии на сооружение нагрузки (будем далее обозначать этот фактор через F), при изменении температуры (t) или смещении опор (с) появляются линейные отклонения его точек и углы поворота сечений. На рис. 7.1 сплошной линией показано начальное (до приложения внешней нагрузки) положение стержней рамы, штриховой - положение после нагружения (деформированное). Сечение K переместилось в положение K1. Угол φ характеризует поворот сечения, отрезок KK1 (на схеме не показан) - линейное перемещение сечения K.
Линейное перемещение сечения K по направлению, не совпадающему с истинным, можно установить, найдя проекцию отрезка KK1 на это направление. В инженерных расчетах наиболее часто определяются перемещения сечения по вертикальному и горизонтальному направлениям. Определение перемещений производится при проверке жесткости сооружений, расчете их на устойчивость и колебания, а также при
расчете статически неопределимых систем.
Перемещение какого-либо сечения принято обозначать буквой ∆ (дэльта) с двумя индексами, первый из которых указывает направление перемещения, а второй - причину, вызвавшую перемещение. Так, ∆i, обозначает перемещение сечения по 1-му направлению, вызванное внешней нагрузкой. Смысл обозначений ∆2f и ∆3F, раскрывается с помощью рис. 7.1. В дальнейшем необходимо будет определять перемещения по направлению действия некоторых сосредоточенных сил F1, F2,…,Fn Тогда обозначение ∆iF следует читать так: это перемещение точки приложения силы Fi по ее направлению, вызванное нагрузкой F .
Перемещение по i -му направлению, вызванное температурным воздействием, обозначается ∆it, смещением опор - ∆ic .
Определение перемещений в линейно деформируемых системах основывается на общих теоремах об упругих системах.
28. Работа внешних и внутренних сил.
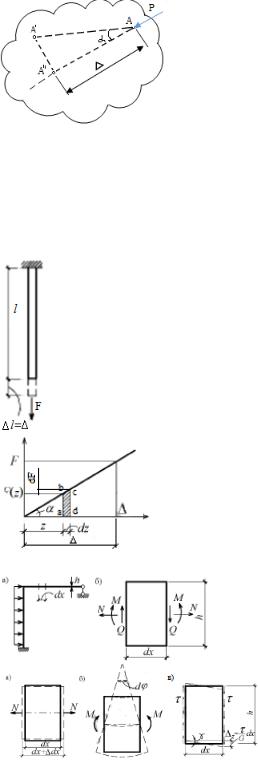
рассмотрим равновесие плоского тела, в точке А которого приложена внешняя сосредоточенная нагрузка F. Предположим, что от какого-либо воздействия точка А переместилась в положение А’.
проекцию полного перемещения на линию действия силы F обозначим ∆, а угол между прямой АА’ и линией действия силы- а. Работа, выполненная силой F, W=F АА’’=F АА’ cosa=F∆, т.е. работа сосредоточенной силы равна произведению этой силы на перемеще-
ние по линии ее действия. Работу считают положительной, если направление перемещения совпадает с направлением действия силы. Нагрузки, которые увеличиваются постепенно называются статическими. Нарастание деформаций и перемещений в этом случае будет также плавным, и в уравнения равновесия можно не включать силы инерции перемещающихся масс.
Пусть идеально упругий, защемленный одним концом стержень, к которому приложена статическая нагрузка F, центрально растянут. Увеличение нагрузки приводит к пропорциональному возрастанию деформации. При F=0 ∆=0. С увеличение силы dF перемещение возрастает на dz. Элементарная работа выразится площадью трапеции abcd, а полная работа, равная сумме элементарных работ, площадью треугольника ОАВ. Т.о. выполняемая работа статической нагрузкой W=0.5F∆- справедлива при действии любых статических нагрузок. Работа внешней статически приложенной силы равна половине произведения значения этой силы на значение
вызванного ею перемещения (теорема Клапейрона (1799-1864)). Работу статически приложенной силы на перемещении, вызванном этой же силой, принято называть действительной работой. При совместном действии на систему нескольких статически приложенных сил их работа вычисляется полусуммой произведений каждой силы на соответствующее ей суммарное перемещение: W=0.5 ΣFi∆I, (i=1, n).
При действии на систему статических нагрузок в элементах системы возникают внутренние силы сопротивления деформации, которые возрастают с ростом внешних нагрузок. эти силы на соответствующих перемещениях производят работу, и эта работа д.б. = работе внешних сил по абсолютной величине, но противоположна по
знаку. Для определения работы этих сил выделим из системы (рис.7.7,а) двумя сечениями элемент длины dx (рис.7.7,б). По отношению к этому элементу силы N, M и Q, заменяющие действие отброшенных частей системы на выделенный элемент, являются внешними, вызы-
вающими его деформацию. Действие на элемент продольных сил N вызывает растяжение его на ∆dx= Ndx/EA. Элементарная работа внутренних продольных сил для бесконечно малого элемента: dАN=-0,5N∆dx =-N2dx/2EA.
Под действием изгибающих моментов произойдет взаимный поворот плоскостей элемента. На угловом перемещении сечений dφ, его работа будет равна -0,5Mdφ. Используя формулу для определения кривизны оси стержня 1/ρ= М/EJ. Используя формулу для определения кривизны оси стержня получим в виде dφ=dx/ρ=Mdx/EJ. dAM=-M2dx/2EJ.
Поперечные силы Q, приложенные в плоскостях граней элемента длиной dx, вызовут взаимный сдвиг этих плоскостей на некоторый угол γ: ∆z=γdx=τdx/G. Касательные напряжения в сечении, определяемые по ф-ле Журавского: τ= QSyотн/Jyb(z). Для определения их работы выделим на торцевых сечениях элемента dx соответствующие полоски площадью
dA. Учитывая статический хар-р нагрузки, найдем, что: dAQ=-0.5∫(τdA)∆z=-dx/2G ∫τ2dA= =-Q2dx/2G ∫(Syотн/Jyb(z))2=-μQ2dx/2GA.
Суммарная работа, выполняемая внутренними силами в плоской стержневой системе:
Авнутр=-Σ∫(N2dx/2EA)- Σ∫(M2dx/2EJ)- Σ∫(μQ2dx/2GA). Поскольку величины N, M и Q вхо-
дят в квадрате, то работа внутренних сил всегда отрицательна.
Где μ=А∫(Syотн/Jyb(z))2- безразмерный коэффициент, зависящий от формы площади поперечного сечения (для прямоугольного сечения 1.2, для круглого-1.18); A- площадь сечения стержня; J- осевой момент инерции сечения; обозначение МИ Jу в формуле Журавского связано с принятым обозначением осей; EAжесткость стержня на растяжение-сжатие; EJжесткость стержня на изгиб; GAжесткость стержня на сдвиг.

29. Теоремы о взаимности работ и взаимности перемещений.
Предположим, что линейно деформируемая система (рис.7.11а) последовательно нагружается вначале силой Fi, а затем силой Fk.
При “переходе” балки из положения 1 в положение 2 силой Fi на перемещении ∆ii совершается действительная работа, равная Wii=1/2 Fi∆ii.
При “переходе” балки из положения 2 в положение 3 сила Fk совершает действительную работу Wkk=1/2 Fk∆kk, а сила Fi, оставаясь в это время неизменной, совершает на перемещении ∆ik возможную работу Wik=Fi ∆ik. Суммарная работу двух сил будет равно: W1=Wii+Wkk+Wik.
Т.к. значение работы внешних сил равно потенциальной энергии системы и поскольку, независимо от последовательности нагружения, в обоих случаях совпадают начальные и конечные положения балки, то W1= W2. Значит, имеет место равенство: Wik=Wki или
Fi∆ik =Fk∆ki.
Получена формальная запись теоремы о взаимности работ (теоремы Бетти (1823-1892)): работа сил состояния i на перемещениях состояния k равна работе сил состояния k на перемещениях состояния i.
Заметим, что в приведенной формулировке термин “сила” следует понимать как “обобщенная сила”, которой может быть и группа сил, а термин “перемещение” - как “обобщенное перемещение”.
Аналогичная зависимость о взаимности имеется и для возможных работ внутренних сил на соответствующих деформациях. Тогда формулировка теоремы о взаимности работ может быть дана в такой форме: возможная работа внешних (внутренних) сил состояния i на перемещениях (деформациях) состояния k равна работе внешних (внутренних) сил состояния k на перемещениях (деформациях) состояния i.

30. Общая формула перемещений Максвелла-Мора.
Рассмотрим два состояния: 1) грузовое состояние (первое состояние) (рис.1, а), в котором действующая нагрузка вызывает внутренние усилия MP, QP, NP;
2) единичное состояние (второе состояние) (рис. 1, б), в котором действующая единичная сила P=1 вызывает внутренние усилия от единичных сил.
Рисунок 1. Теорема Максвелла-Мора Составим выражение работы А21, то есть работы силы Р2 = 1 на перемещении 21, возни-
кающей от действия сил первого состояния: А21=Р2 21=1 21= 21 Внутренние силы грузового состояния на перемещениях единичного состояния соверша-
ют возможную работу: -V21= Σ∫(MpM/EI+μQpQ/GF+ NpN/EF)dx, (k=1,n и от 0 до lk)
Единичная сила P=1 единичного состояния на перемещении грузового состояния P со-
вершает возможную работу: А21=1 P= P .
Исходя из основных теорем строительной механики эти работы д. б. равными, т.е. Аij= – Vij. Значит, должны быть равны и правые части указанных выше уравнений: ∆р=Σ∫(
MpM/EI+μQpQ/GF+ NpN/EF)dx, , (k=1,n и от 0 до lk)- эта формула называется формулой Мора и используется для определения перемещений точек стержней от внешней нагрузки.
Рассмотрим отдельные случаи применения формулы Мора: 1. В балках возможны три случая:
−если l/h>8 (l −длина балки, h −высота балки), в ф-ле оставляется только моменты: ∆р=Σ∫MpM/EI dx, (k=1,n и от 0 до lk)
−если 5≤ l/h≤8 (l −длина балки, h−высота балки), в ф-ле оставляется только моменты: ∆р=Σ∫( MpM/EI+μQpQ/GF)dx, (k=1,n и от 0 до lk)
−если l/h<5 формула Мора дает большие погрешности. В этом случае перемещения следует определять методами теории упругости.
2. В рамах элементы в основном работают только на изгиб, поэтому в формуле Мора учитываются только моменты: ∆р=Σ∫MpM/EI dx, (k=1,n и от 0 до lk)
3.В арках необходимо учитывать соотношение между основными размерами арки l и f:
−если l/f≤5 (l − расстояние между опорами арки, f − высота арки), учитываются только моменты: ∆р=Σ∫MpM/EI dx, (k=1,n и от 0 до lk)
−если l/f>5,учитываются моменты и продольные силы: ∆р=Σ∫(MpM/EI+NpN/EF)dx, (k=1,n и от 0 до lk)
4.В фермах возникают только продольные силы: ∆р=Σ∫(NpN/EF)dx= Σ(NpkNk/EFk)lk,
(k=1,n и от 0 до lk)
31. Способы вычисления интегралов Мора.
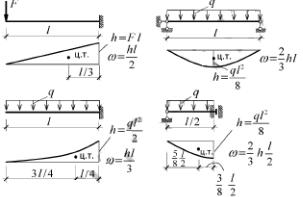
Задача о вычислении перемещений по формуле Мора сводится к вычислению интегралов вида от a до b ∫MiMF/EJ dx , которые принято называть интегралами Мора. Для относительно несложных задач подынтегральная функция f f(х) = MiMF/EJ м. б. такой, что неопределенный интеграл F(х) можно выразить при помощи конечного числа элементарных функций. Тогда определенный интеграл вычисляется по ф-ле от a до b ∫f(х)dx=F(b)- F(a) На практике интегралы типа от a до b ∫f1(x)f2(x)/f3(x) dx вычисляют графоаналитическим способом или с помощью численного интегрирования. Для случая, когда на участке интегрирования стержень имеет постоянную жесткость, то есть EJ =f(x)= const, а одна из функций f1(x) или f2(x) является линейной, одним из наиболее распространенных является способ, предложенный А.Верещагиным.
Операцию вычисления интегралов по способу Верещагина называют иногда “перемножением” эпюр. Положительный знак произведения ωу0 принимается тогда, когда эпюра M, площадь которой обозначена через ω, и ордината у имеют одинаковые знаки, т.е. когда они расположены с одной стороны стержня. При использовании правила Верещагина сложные по очертанию эпюры усилий следует представлять в виде суммы простых, для каждой из которых известны формулы для вычисления площади и положения ее центра тяжести. способ Верещагина нельзя применять в случае, когда обе эпюры усилий являются нелинейными. Перемещение по Верещагину ∆1F= Σ∫ MiMF/EJ dx
Формула Симпсона является точной для любого многочлена не выше третьей степен: l/6EI (+- MFM1(слева)+- MFM1(справа)+- MFM1(по середине).
Таким образом, интеграл Мора вычисляется посредством произведения площади криволинейной эпюры на ординату прямолинейной эпюры, взятую под центром тяжести криволинейной.
32. Перемещения от изменения температуры.
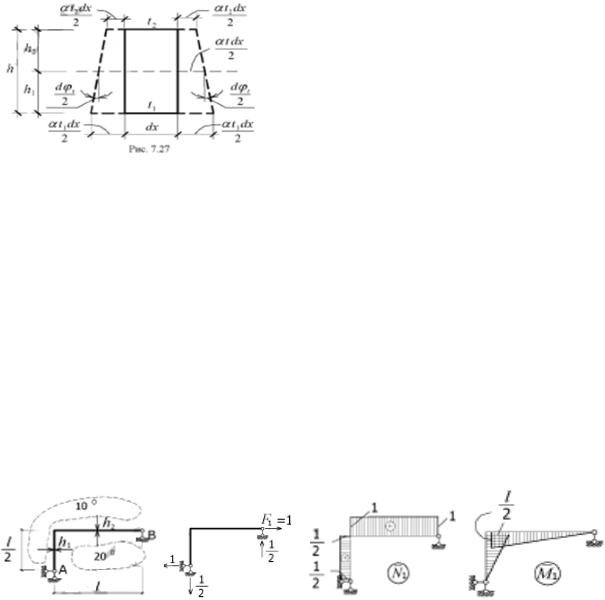
Примем для бесконечно малого элемента (рис. 7.27) системы температуру нижнего волокна равной t1, верхнего - t2, и распределение температуры по высоте сечения по линейному закону.
Температура на оси, проходящей через центр тяжести сечения, будет равной t1=t2+h2(t1-t2)/h. При h1=h2 получим t=(t1+t2)/2. Переход элемента под воздействием температуры в новое положение (показано штриховой линией) представим как результат удлинения всех волокон на dɛt=ɛdx=αtdx.
Удлинение нижнего волокна равно αt1dx, а верхнего - αt2dx, (α - коэффициент линейного расширения). Тогда,
вследствие малости деформаций, получим:
dφt=kdx=(αt1dx-αt2dx)/h=αdx(t1-t2)/h = αt’dx/h, где t’=t1-t2 – перепад температур.
Так как температурные деформации не вызывают сдвига сечений, то, подставляя dɛt и dφt в общую формулу для определения перемещений и заменяя в обозначении ∆ia индекс а на t (указывает от чего возникает перемещение), получим:
∆it=∑(по l)∫N̅iαtdx+∑(по l)∫M̅idx (αt’)/h.
Каждый из интегралов в этом выражении определяет работу внутренних сил вспомогательного состояния системы на перемещениях, вызываемых изменением температуры. Если на отдельных участках стержней α, t, t' и h остаются неизменными, тогда:
∆it=∑αtΩN+∑ ΩM(αt’)/h, где ΩN=(по l)∫N̅idx; ΩM=(по l)∫M̅idx - площади эпюр продольных сил и изгибающих моментов на участках стержней с указанными особенностями. Пример. Определить горизонтальное перемещение точки B рамы от указанного на схеме теплового воздействия. Неизменные по длине каждого из стержней поперечные сечения принять симметричными. Высота сечения вертикального стержня равна h1, горизонтального h2.
Температура по оси каждого стержня равна t=(20+10)/2=15°, перепад температур t’=2010=10°. Вычисляем искомое перемещение: ∆lt=∑αtΩN+∑ ΩM(αt’)/h=α15°(1/2)(l/2)+α15(1l) +(α10/h1)(1/2)(l/2)(l/2)+(α10/h2)(1/2)(l/2)l=18,75α+((1,25l2/h1)+(2,5l2/h2))α.
33. Перемещения от смещения опор.
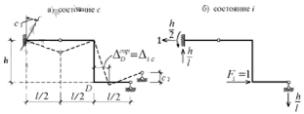
Опорные связи заданной статически определимой системы под влияниями каких-то воздействий переместились в положения: защемление повернулось по часовой стрелке на угол с, а шарнирно-подвижная опора сместилась вверх на с2. Обозначим это состояние системы как состояние с. Для определения перемещения какой-нибудь точки, например горизонтального перемещения узла D, в вспомогательном состоянии по направлению искомого перемещения приложим силу Fi=1.
Определим работу сил i -го состояния системы на перемещениях ее в состоянии с. В состоянии с внутренние силы отсутствуют: перемещения опор статически определимой системы не вызывают усилий в ее элементах. Поэтому на перемещениях состояния с совершат работу только внешние си-
лы, к которым относятся и опорные реакции. В соответствии с принципом возможных перемещений получим: ∆ic+∑Rkiсk=0, где Rki - реакция в связи с номером к от Fi=1; сk - заданное смещение связи k.
Отсюда следует, что ∆ic=-∑Rkiсk. Знак произведения Rkick принимается положительным, если направления Rki и ck совпадают. Для рассматриваемого примера получим: ∆горD=∆iс =
-∑Rkick=-(-((hc1)/2)-((hc2)/l))=h((c1/2)+(c2/l)).
Если заданная линейно деформируемая система испытывает одновременно несколько воздействий, то искомое перемещение определяется суммированием составляющих от каждого воздействия в отдельности.

34. Статически неопределимые системы и их свойства.
Статически неопределимыми системами наз. такие системы, у которых не все внутренние силы м.б. найдены из уравнений равновесия твердого тела или системы твердых тел. В статически неопределимых системах число неизвестных усилий превышает число возможных уравнений равновесия. Связи, которые можно удалить в балке, не нарушая ее свойства геометрической неизменяемости и неподвижности, наз. лишними. Количество лишних связей, устранение которых обращает систему в статически определимую, наз. степенью статической неопределимости системы. Свойства СНС:
1. Тепловое воздействие на систему, смещение опор или неточность изготовления ее элементов с последующим натяжением их во время сборки вызывают, дополнительные усилия в СНС (в статически определимой системе эти факторы вызывают только перемещения сечений, усилия не возникают).
Пример: Пусть температура нижних волокон балки будет равна t1, а верхних - t2, причем t1>t2. Если бы в точке B опорная связь отсутствовала, то консольный стержень при указанном воздействии занял бы положение AB'. Чтобы вернуть его из этого положения в начальное необходимо в точке B' приложить силу Xi,
равную реакции, возникающей в опоре B от изменения температуры.
2.Усилия в статически неопределимых системах, возникающие от внешней нагрузки, зависят от соотношения жесткостей элементов этой системы.
3.Система с n лишними связями сохраняет геометрическую неизменяемость и после потери этих связей, в то время как статически определимая система после устранения хотя бы одной связи превращается в изменяемую.
4.Перемещения статически неопределимых систем меньше соответствующих перемещений тех статически определимых систем, из которых они образуются.
Пример: ∆2>∆1.