50. Цифровой частотомер. Принцип действия. Погрешности измерения.
Принцип действия цифрового частотомера основан на подсчете числа периодов неизвестной частоты fx за известный интервал времени измерения Tи (время счета). Если за время Tи подсчитано N импульсов, то среднее значение измеряемой частоты fx=N/Tи.
Исследуемый периодический сигнал (импульсный или гармонический) с частотой fx подается на вх. устр-во (ВУ), усиливающее или ослабляющее его до необходимого значения. Снимаемый с выхода ВУ гармонический сигнал u1 поступает на формирователь импульсов (ФИ), преобразующий его в последовательность коротких однополярных импульсов u2, следующих с периодом Tx=1/fx. и называемых счетными. Передние фронты счетных импульсов должны практически совпадать с моментами перехода сигнала через нулевое значение при его возрастании. Схемотехнически формирователь импульса состоит из усилителя-ограничителя и компаратора. Счетные импульсы u2 поступают на один из входов временного селектора (ВС), на второй вход которого от устройства формирования и управления (УФУ) подается строб-импульс u3 прямоугольной формы и калиброванной длительности Tи>Tx. Временной селектор открывается строб-импульсом u3 и в течение длительности строб-импульса пропускает группу из Nx импульсов u2 на вход счетчика (СЧ). Счетчик подсчитывает число импульсов Nx и выдает соответствующий код в цифровое отсчетное устройство (ЦОУ) частотомера. Для формирования строб-импульса используется кварцевый генератор (КГ), вырабатывающий тактовые сигналы стабильной частоты и декадный делитель частоты (ДЧ).
Временная диаграмма работы цифрового частотомера показана на рис.
Диапазон измеряемых частот – от нескольких Гц до сотен МГц. Относительная погрешность измерения цифровых частотомеров составляет 10-6…10-9.
Данный частотомер может производить счет или суммирование электрических импульсов, а также использоваться в качестве делителя частоты и генератора образцовых частот.
Относительная погрешность частотомера Ф5041 не превышает следующих значений, определяемых по формулам:
а)
при измерении частоты где
где
 – нестабильность частоты кварцевого
генератора,
– нестабильность частоты кварцевого
генератора,
 =±10-7
за 10 дней, fx
–
измеряемая частота (Гц), Tи
–
время измерения (с).
=±10-7
за 10 дней, fx
–
измеряемая частота (Гц), Tи
–
время измерения (с).
б)
при измерении периода где
Δt
– период заполняющей частоты (метки
времени от 0,1 до 103
мкс), Тx-
период измеряемого сигнала (мкс), n
– число усредняемых периодов за время
счета,
где
Δt
– период заполняющей частоты (метки
времени от 0,1 до 103
мкс), Тx-
период измеряемого сигнала (мкс), n
– число усредняемых периодов за время
счета,
 –
относительная погрешность уровня
запуска. Значение
–
относительная погрешность уровня
запуска. Значение
 =3·10-3
при
измерении периодов гармонических
сигналов и
=3·10-3
при
измерении периодов гармонических
сигналов и
 =0
при измерении периодов импульсных
сигналов.
=0
при измерении периодов импульсных
сигналов.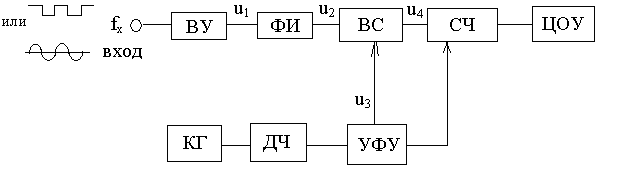
На высоких частотах погрешность определяется нестабильностью кварцевого генератора. При измерении низких частот погрешность определяется погрешностью дискретизации.
51, 52. Цифровые вольтметры.
Принцип работы основан на дискретном и цифровом представлении непрерывных измеряемых величин. Состоит из входного устройства, АЦП, цифрового отсчетного устройства и управляющего устройства.
Классификация цифровых вольтметров
В зависимости от количества и вида измеряемых величин можно выделить 4 основные группы серийных приборов:
1)
цифровые вольтметры для измерения
только напряжения постоянного тока;2)
универсальные приборы (мультиметры),
которые могут измерять:а) среднее
значение по модулю синусоидального
напряжения;б) среднеквадратическое
значение любого периодического
напряжения;в) сопротивление, емкость,
температуру, индуктивность, отношение
двух напряжений или токов.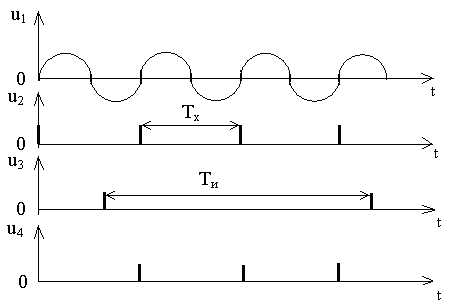
3) приборы для измерения только средних и среднеквадратических значений. Они содержат соответствующий преобразователь измеряемой величины в напряжение постоянного тока;4) импульсные цифровые вольтметры. Они содержат входной преобразователь амплитуды импульсного сигнала в амплитуду постоянного тока.По методам преобразования напряжение постоянного тока в код можно выделить 4 основных варианта ЦВ: 1) времяимпульсные цифровые вольтметры: с линейной разверткой и с двухтактным интегрированием;
2) частотно-импульсные цифровые вольтметры; 3) кодоимпульсные цифровые вольтметры.
Во времяимпульсном цифровом вольтметре напряжение постоянного тока преобразуется в пропорциональный интервал времени. Различие между двумя вариантами заключается в способе преобразования напряжения в интервал времени. В первом варианте оно осуществляется путем сравнения измеряемого напряжения с линейно-изменяющимся напряжением. Во втором варианте преобразование напряжения в интервал времени осуществляется путем двухтактного интегрирования.Помеха общего вида возникает в Эл.схеме из-за несовершенства источников питания на частотах 50 и 100Гц.Различают динамические погрешности первого и второго рода. Динамические погрешности первого рода, также как и в аналоговых приборах, обусловлены инерционностью элементов измерительной части прибора и так же влияют на динамические свойства ЦИП. Динамические погрешности второго рода возникают из-за того, что измерение производится в один момент времени, предположим t2, а результат измерения приписывается обычно либо началу цикла преобразования t1 , либо концу цикла преобразования t3. Это приводит к возникновению погрешности ΔХ1 и &DeltaХ2, динамическая погрешность второго рода, так же как и динамическая погрешность первого рода, ограничи-вает допустимую скорость изменения (частоту) измеряемой величины при заданном цикле ТЦ.
Статические погрешности складываются обычно из следующих составляющих: погрешность дискретности ΔXA; - погрешность реализации уровней квантования ΔXР, возникающей от несоответствия принятых значений уровней квантования и их реальных значений;
- погрешность ΔX4 от наличия порога чувствительности или от нестабильности порога чувствительности сравнивающего устройства;
-
погрешность ΔXП
от действия помех на ЦИП и его
элементы.Составляющие ΔXР,
ΔX4
и ΔXП
обусловлены несовершенством прибора
и поэтому они называются составляющими
инструментальной погрешности. Погрешность
дискретности – методическая
погрешность.Дополнительные погрешности
ЦИП, также как и в аналоговых приборах,
возни-кают при изменении внешних факторов
(температуры, напряжения и частоты
источника питания, действия помех и т.
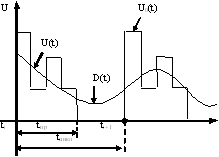
д.).Применение циклического режима
работы прибора. Это значит, что в
определенные моменты времени должна
поступать команда на совершение
преобразование любым из 5 методов.Рассмотрим
циклический
режим
преобразования, основанный на
кодоимпульсном методе: Принцип работы:
нелинейная → дискретная → код. В момент
времени ti
и ti+1
и т.д. начинается цикл преобразования.
Каждое преобразование занимает промежуток
времени tпр.
В конце каждого периода преобразования
образуется значение измеряемой величины
(код). Как видно из рисунка кодовые слова
представляют исходную информацию,
неизмеренную в интервале ti
+ tпр
<= t <= ti+1
+ tпр.При
периодическом режиме используют
одновременно квантование и дискретизацию.
При этом кроме погрешности квантования
и дискретизации возникает погрешность
апроксимациии от замены непрерывной
функции ее отдельными значениями через
интервал дискретности Δt=1/2fm,
где fm
– наивысшая частота в спектре сигнала.При
следящем
режиме
каждое очередное преобразование
происходит только тогда, когда изменение
измеряемой величины превосходит ступень
квантования. Допустимая скорость
изменения измеряемой величины x
определяется временем одного преобразования
при заданном значении ступени квантования
следующим выражением: (dx/dt)max<=g/tn,
где tn
– время преобразования.Если скорость
изменения сигнала не превышает максимально
допустимую, то погрешность не будет
превышать одной ступени кванта. Это
основное достоинство следящего режима.