

Білокриницький С. М. Геодезія
.pdf351
Другий спосіб (рис. 139). У
цьому способі розшук пункту здійснюється методом редукування з застосуванням оберненої засічки. Як і в першому способі, поблизу втраченого пункту Ро вибираємо допоміжну точку Р′ і оберненою засічкою визначаємо її коРис.
138. Розшук центра пункту ординати.
за трьома пунктами (1-й спосіб)
Метод редукування ґрунтується на визначенні зміщення точки Р′ відносно пункту Ро за різницями горизонталь-
них кутів 1о , 3о , 1/ , 3/ , які виміряні відповідно у точці Р′ під час розшуку і на і на пункті Ро в минулі
роки (значення кутів 1о , 3о випи-
сується із каталога).
Величини редукцій визначаються в системі прямокутних коорди Рис. 139. Розшук центра пункту нат за початок якої приймається
за трьома пунктами (2-й спосіб) точка Р′, а за вісь абсцис – сто-
рона Р′Р2.
|
1 1о 1/ , |
|
|
|
3 3о 3/ ; |
|
|
||||||||
|
Rx |
B3 1 B1 3 |
, |
|
Ry |
|
A3 1 A1 3 |
; |
|||||||
|
|
|
|
|
|||||||||||
|
|
|
A1B3 A3 B1 |
|
|
|
|
|
|
A1B3 A3 B1 |
|||||
A1 |
k1 (S1 sin 2 |
S2 sin 1 ) , |
|
B1 |
k1 (S1 cos 2 |
S2 |
cos 1 ) , |
||||||||
A3 |
k2 (S2 sin 3 |
S1 sin 2 ) , |
|
B3 |
k2 (S2 |
cos 3 |
S3 |
cos 2 ) , |
|||||||
|
k1 |
|
|
, |
k2 |
|
, |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
S1S2 |
|
|
|
S2 S3 |
|
|
|
|
|||

352
R arctg Ry , Rx
Рис. 139, а. Розшук центра пунктувід точки теодолітного ходу або від пункту GPS-спостережень
R |
Ry |
|
R |
x |
|
Rx2 Ry2 |
|
sin R |
cos R |
||||||
|
|
|
|
||||
У цих формулах:
S1, S2, S3 – довжини сторін між втраченим пунктом Ро і суміжними пунктами мережі (Р1, Р2 і Р3); α1, α2, α3 – дирекційні кути цих сторін;
А1, В1, А3, В3 - коефіцієнти, які обчислюються завчасно за даними, що виписуються з каталога;
αR - дирекційний кут зміщення точки Р′;
R, Rх, Rу – зміщення точки Р′ і його проекції на осі координат.
Положення центра пункту Ро знаходимо за полярними координатами αR і R, відкладаючи їхні значення від сторони Р′Р2 в сторону втраченого пункту. Його положення можна також знайти відкладанням у напрямках відповідних осей відрізків Rх і Rу.
4.6. Розшук центра втраченого пункту від точки теодолітного ходу або від пункту GPS-спостережень
На місцевості поблизу втраченого пункту Ро вибирається допоміжна точка Р′, координати якої визначаються з теодолітного ходу або із GPS-спостережень. За одержаними координатами точки Р′ і координатами одного з сусідніх пунктів (наприклад пункту Р1 або точки теодолітного ходу Т1) і координатами пункту Ро обчислюються дирекційні
кути αР′Р1 і αР′Ро, а за їхніми різницями кут γ = Р1Р′Ро та довжину відрізка Р′Ро (рис.139, а). Після цього у відрізка РР0
353
уздовжточці Р′ за допомогою теодоліта будують кут Р1Р′Ро і, відкладаючи довжину відрізка Р′Ро уздовж його напрямку, знаходять положення центра пункту Ро.
5. Геодезичні мережі спеціального призначення
До геодезичних мереж спеціального призначення належать:
−просторові геодезичні мережі на геодинамічних полігонах;
−спеціальні геодезичні мережі для інженерногеодезичного забезпечення будівництва, гірничої справи та інші мережі, які будуються відповідно до вимог технічних проектів, що розробляються різними відомствами при виконанні спеціальних завдань.
Геодезичні мережі спеціального призначення будуються за відносними методами супутникової геодезії, а також за традиційними методами тріангуляції, трилатерації та полігонометрії.
У сейсмічних і техногенно активних районах країни на геодинамічних полігонах створюються просторові геодезичні мережі для вивчення сучасних рухів земної кори.
Кутові, лінійні, висотні, астрономо-гравіметричні вимірювання та супутникові спостереження у просторових геодезичних мережах виконуються з підвищеною точністю і зводяться до єдиної геодезичної системи для використання їх у процесі врівноваження ДГМ.
Створення геодинамічних полігонів, періодичність та точність геодезичних і гравіметричних вимірювань на них визначаються нормативно-технічними документами, які затверджуються Укргеодезкартографією.
354
6. Приведення виміряних горизонтальних напрямків до центрів пунктів
6.1. Види приведень
Вершинами горизонтальних кутів, які використовуються при обчисленні геодезичної мережі, повинні бути центри геодезичних пунктів. Тільки у цьому випадку координати, обчислені за результатами кутових вимірювань, будуть віднесені до центрів пунктів.
Для того щоби виміряти напрямки або кути, віднесені до центрів геодезичних пунктів, необхідно кутомірний прилад встановити точно над цими центрами. Крім того, необхідно, щоби осі візирних цілей геодезичних знаків збігалися з висковими лініями, що проходять через центри пунктів.
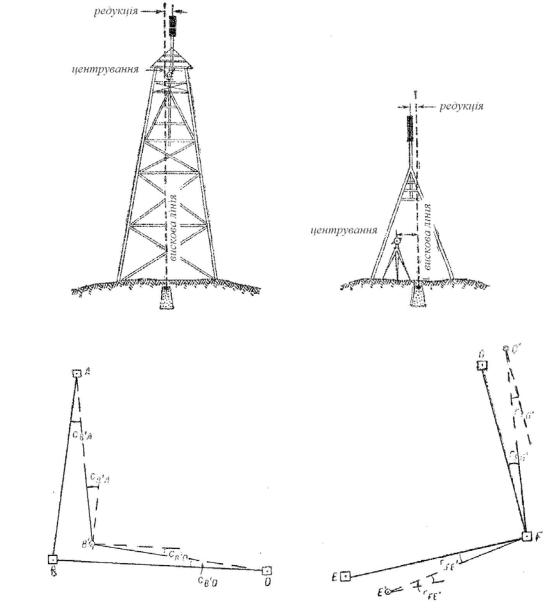
Практично не завжди можна встановити прилад точно над центром пункту. Наприклад, інструментальний столик геодезичного сигналу, на якому встановлюється теодоліт, як правило, відхиляється від вискової лінії, що проходить через центр пункту. Навіть при вимірюванні кутів зі штатива іноді доводиться встановлювати теодоліт поза центром пункту. Приклади позацентрованого положення теодоліта і візирної цілі показані на рис. 140.
Кути, виміряні при позацентрованому положенні приладу за напрямками на візирні цілі, будуть різнитися від кутів, виміряних із центра пункту. Так, на рис. 141, а кут АВ´D, виміряний при позацентрованому положенні теодоліта, не дорівнює куту АВD. Для приведення його до центра пункту В необхідно ввести до виміряних напрямків В´D і В´А поправки cB| D і cB| A .
Поправки напрямків, зумовлені позацентрованим положенням приладу, називають поправками за центрування.
Візирний пристрій геодезичного знака не збігається з висковою лінією, що проходить через центр пункту, вна-
355
слідок просідання самого знака й неточності його побудови. Звичайно, і в цьому випадку кут Е´FG´ (рис. 141, б), виміряний при позацентрованому положенні візирних цілей на пунктах Е і G, необхідно привести до кута ЕFG шляхом виправлення виміряних напрямків FG´ і FE´ поправками rFG | і rFE| .
Рис. 140. Позацентроване положення теодоліта і візирної цілі
Рис. 141. Приведення виміряних напрямків до центрів пунктів
356
Поправки напрямків, зумовлені позацентрованим положенням візирної цілі геодезичного знака, мають назву поправок за редукцію.
Отже, розрізняють два види приведення горизонтальних напрямків до центрів пунктів: приведення за центрування кутомірного приладу і приведення за редукцію візирних цілей.
6.2. Формули для обчислення поправок за центрування і редукцію
6.2.1. Формула для обчислення поправок за центрування
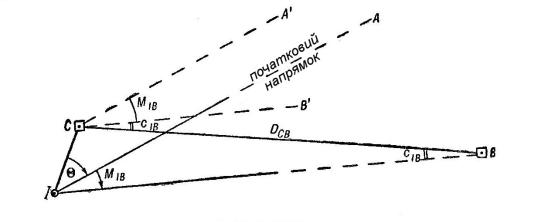
Нехай точка І (рис. 142) є проекцією на горизонтальну площину вертикальної осі теодоліта, встановленого на відносно малій відстані від центра пункту С. Якщо напрямок ІА вважати початковим, то напрямок ІВ, виміряний з точки
І, буде висловлений кутом АІВ = M IB . Уявімо собі, що тео-
доліт із точки І переміщений у точку С, при цьому його орієнтування за азимутом не змінилося. Тоді початковий
напрямок займе положення CA| , паралельне ІА, а зорова
труба буде спрямована по прямій CB| , паралельній ІВ. Щоби візирна вісь зорової труби збіглася з потрібним напрямком СВ, її разом з алідадою горизонтального круга
необхідно повернути на кут B|CB cIB , який і дасть вели-
чину поправки за центрування в напрямок ІВ.
Цей кут, звичайно, дорівнює куту СВІ, який може бути отриманий із трикутника ВСІ за трьома відомими його елементами:
-відстанню DCB між пунктами В і С;
-відстанню l між проекціями вертикальної осі приладу
іцентра пункту, яка називається лінійним елементом центрування;
357
- кутом ВІС, який, як видно з рисунка, дорівнює сумі двох кутів: Θ і MIB.
Рис. 142. До виведення формули для обчислення поправки за центрування
Кут Θ з вершиною в точці І, виміряний за рухом годинникової стрілки від напрямку на центр пункту до початкового напрямку, має назву кутового елемента центрування.
Величина кута MIB дорівнює значенню виміряного напря-
мку ІВ.
Застосовуючи до трикутника ВСІ теорему синусів, можна зазначити,що
l |
|
DCB |
, |
sin cIB |
sin (M IB ) |
звідки
sin cIB lsin (M IB ) .
DCB
Величина l мала у порівнянні з відстанню DCB , тому і кут cIB малий. Отже, синус цього кута можна вважати таким, що дорівнює самому куту, вираженому в радіанній
мірі, тобто |
|
|
|
|
|
c" |
|
l sin (M |
|
) |
, |
IB |
D |
IB |
|
||
" |
|
|
|
|
|
|
|
CB |
|
|
|

358
або, незважаючи на поточні індекси, c" " Dl sin (M ),
де ρ″= 206265″.
Величина поправки, обчислена за останньою формулою, може бути додатною або від’ємною, в залежності від знака синуса кута (М+Θ); при (М+Θ) < 180° с > 0, а при
(М+Θ) > 180° с < 0.
Поправки, обчислені за елементами центрування даного пункта, вводяться в напрямки, виміряні з цього пункта на всі сусідні пункти, враховуючи і напрямок на початковий пункт.
Для початкового напрямку М = 0 формула буде мати вигляд
c" "l sin .
D
6.2.2. Формула для обчислення поправок за редукцію
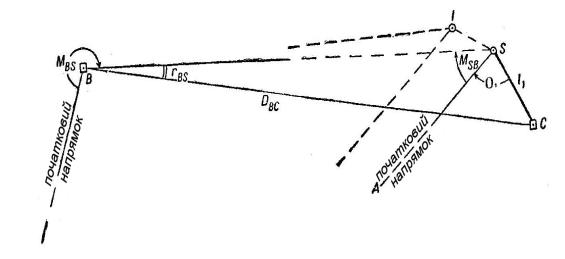
При спостереженнях із пункту В на пункт С (рис. 143) візування здійснюється на точку S. Якщо ця точка не знаходиться на висковій лінії, що проходить через центр пункту С, то виміряний напрямок ВS необхідно привести до центру пункту С, тобто ввести в цей напрямок поправку за редукцію.
Якщо уявити собі, що в точці S встановлений теодоліт і початковий напрямок SА створює з напрямком на центр С
кут 1 , то кутом, що орієнтує напрямок ВS відносно відрізка SC l1, буде кут (M SB 1) . Практично для визначення кута M SB використовується напрямок, виміряний на
пункті С при встановленні теодоліта не в точці S, а в точці І (рис. 4), тому що відстань між цими точками дуже мала у порівнянні з відстанню між пунктами В та С і приросток
359
кута (M SB 1) на декілька секунд не змінить поправки
rBS .
Відрізок l1 від проекції візирної цілі до центра пункту має назву лінійного елемента редукції. Кут 1 з вершиною
в проекції візирної цілі S, виміряний за рухом годинникової стрілки від напрямку на центр пункту до початкового напрямку, називається кутовим елементом редукції.
Рис. 143. До виведення формули для обчислення поправки за редукцію
Шукана поправка за редукцію в напрямку ВS визначається із трикутника ВSС за формулою
r" |
" |
|
l1 |
sin(M ), |
||
|
|
|||||
BS |
|
|
|
1 |
||
або |
|
|
DBC |
|||
|
l1 |
|
|
|||
r" |
" |
sin(M 1 ). |
||||
D |
||||||
|
|
|
|
|||
Отже, формула для обчислення поправок за редукцію має аналогічний вигляд, що і формула для обчислення поправок за центрування.
Відзначимо, що поправки за редукцію, обчислені за елементами l1, 1 і М будь-якого пункту, вводять не в напрямки,
360
виміряні з цього пункту, як це робиться при введенні поправок за центрування, а в напрямки, виміряні з сусідніх пунктів на даний пункт.
6.3. Способи визначення елементів приведення
Для приведення виміряних напрямків до центрів пунктів необхідно знати величини елементів центрування і редукції.
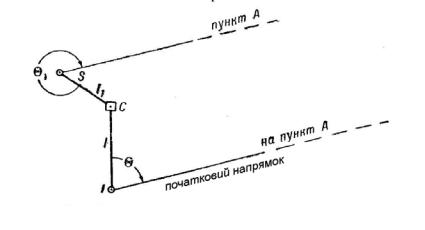
Лінійні елементи центрування l і редукції l1 показують,
на якій відстані від проекцій вертикальної осі теодоліта І та візирної цілі S знаходиться центр пункту С (рис. 144).
Кутові елементи центрування і редукції 1 є горизонталь-
ними кутами, вершини яких знаходяться відповідно в точках І та S. Ці кути відраховуються за рухом годинникової стрілки від напрямку на центр пункту до напрямку, прийнятого за початковий.
Рис. 144. Елементи центрування і редукції
Усі елементи приведень так само, як і напрямки на сусідні геодезичні пункти, вимірюються на місцевості. Для того, щоби визначити елементи приведень, потрібно або спроектувати вертикальну вісь теодоліта, точку візування і центр пункту на одну горизонтальну площину і потім безпосередньо виміряти потрібні елементи, або обчислити їх за результатами спеціальних спостережень, або ж, якщо