

3.3 Силовой расчёт ведущего звена
Отсоединяем кривошип от стойки и группы Ассура, а их отсутствие заменяем реакциями (Лист1).
Уравновешивающую силу прикладываем в точке А и направляем перпендикулярно кривошипу.
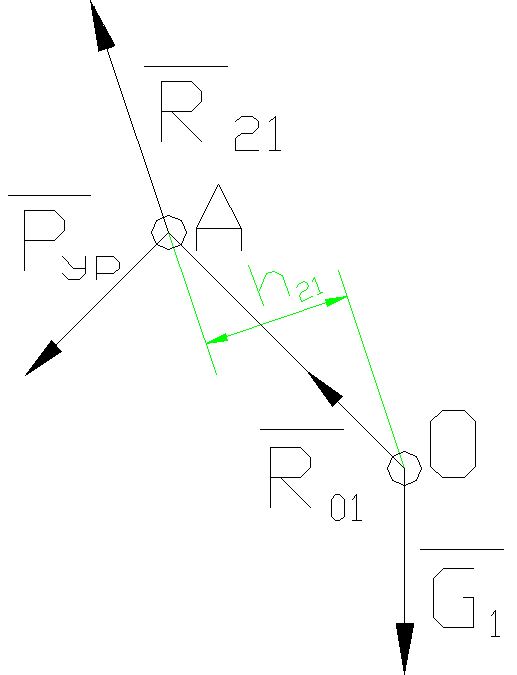
![]() находим
из суммы моментов всех сил, действующих
на кривошип, относительно точки О.
находим
из суммы моментов всех сил, действующих
на кривошип, относительно точки О.
![]() ;
(3.9)
;
(3.9)
![]() ;
;
где:
![]() -
реакция шатуна на кривошип, Н;
-
реакция шатуна на кривошип, Н;
![]() -
расстояние линии действия силы реакции
-
расстояние линии действия силы реакции
![]() от точки О на чертеже, мм;
от точки О на чертеже, мм;
![]() -
масштабный коэффициент перемещений,
м/мм;
-
масштабный коэффициент перемещений,
м/мм;
![]() -
длина кривошипа, м.
-
длина кривошипа, м.
![]()
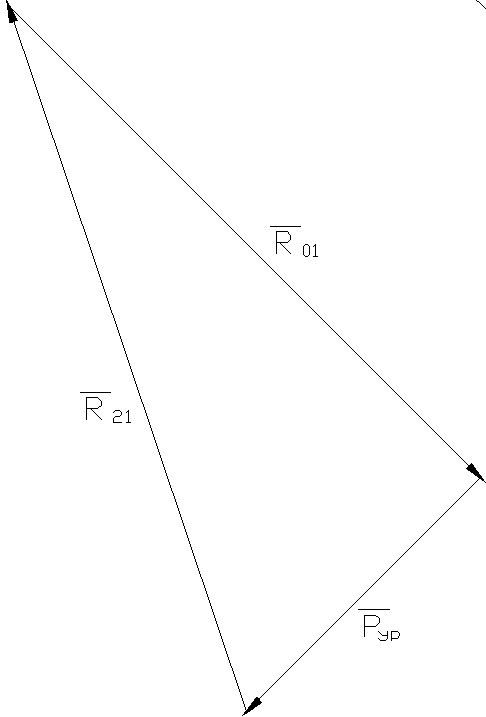
Давление
![]() в паре кривошип-стойка определяем из
уравнения равновесия кривошипа (3.10) .
в паре кривошип-стойка определяем из
уравнения равновесия кривошипа (3.10) .
![]() ;
;
Строим
векторное уравнение (3.10) и определяем
неизвестный вектор
![]() (Лист1).
(Лист1).
Таблица
3.3 – величины отрезков, показывающих в
масштабе
![]() ,
векторы сил, действующих на кривошип.
,
векторы сил, действующих на кривошип.
|
|
|
|
|
мм | ||
|
239,28 |
|
214,4 |
Таблица 3.4 – численные значения сил, действующих на кривошип в 3 положении механизма, Н.
|
|
|
|
|
|
23928000 |
|
8191,35 |
21440000 |
4 Рычаг Жуковского
Определим с помощью рычага Жуковского (Лист1). Для этго на план скоростей 3 положения механизма, повёрнутый на 90°, переносим все заданные силы, включая уравновешивающую.


Пара сил, Н
![]() ;
;
![]() ;
(4.1)
;
(4.1)
где:
![]() -
момент пары сил инерции шатуна, Н;
-
момент пары сил инерции шатуна, Н;
![]() -
длина шатуна, м.
-
длина шатуна, м.
![]()
Из
условия равновесия плана скоростей как
“жёсткого рычага”, определяем
уравновешивающую силу
![]() .
.
![]() (4.2)
(4.2)
![]() ;
;
где:
![]() и
и![]() -пара
сил, Н;
-пара
сил, Н;
![]() -
сила инерции ползуна, Н;
-
сила инерции ползуна, Н;
![]() -
сила инерции шатуна, Н;
-
сила инерции шатуна, Н;
ob – величина отрезка ob плана скоростей, мм;
oa - длина отрезка oa плана скоростей, мм;
![]() -
сила тяжести ползуна, Н;
-
сила тяжести ползуна, Н;
![]() -
сила тяжести шатуна, Н;
-
сила тяжести шатуна, Н;
![]() и
и
![]() -
расстояния линий действия пары сил от
полюса на чертеже, мм;
-
расстояния линий действия пары сил от
полюса на чертеже, мм;
![]() -
расстояние линии действия силы тяжести
шатуна от полюса плана скоростей, мм;
-
расстояние линии действия силы тяжести
шатуна от полюса плана скоростей, мм;
![]() -
расстояние линии действия силы инерции
шатуна от полюса плана скоростей на
чертеже, мм.
-
расстояние линии действия силы инерции
шатуна от полюса плана скоростей на
чертеже, мм.

 Определим
погрешность, полученную при классическом
способе определения уравновешивающей
силы.
Определим
погрешность, полученную при классическом
способе определения уравновешивающей
силы.
![]() ;
(4.3)
;
(4.3)
где:
![]() -
уравновешивающая сила, полученная при
силовом расчёте кривошипа, Н;
-
уравновешивающая сила, полученная при
силовом расчёте кривошипа, Н;
![]() -
уравновешивающая сила, полученная
методом рычага Жуковского, Н.
-
уравновешивающая сила, полученная
методом рычага Жуковского, Н.
![]()
 Задание
2.
Задание
2.
Синтез эвольвентного зацепления и
определение передаточных отношений
планетарных редукторов.
Таблица исходных данных
|
|
|
|
|
15 |
37 |
5 |
Определение передаточных отношений планетарных редукторов
Из всего многообразия планетарных редукторов различают четыре типовых схемы:
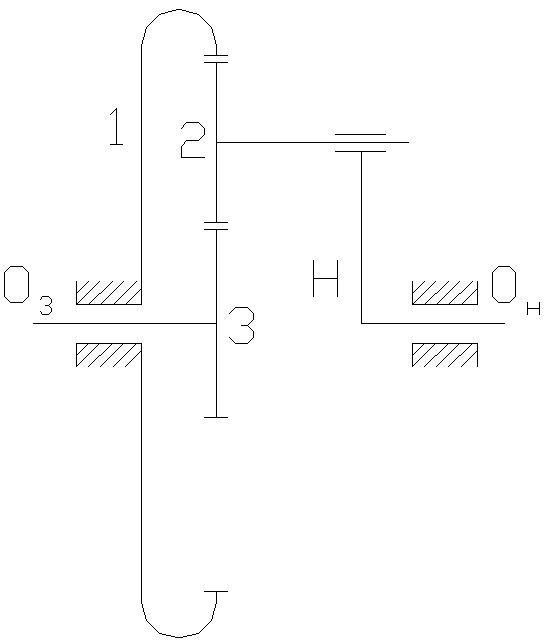
Рисунок 1.1 – Планетарный редуктор с внутренним зацеплением и паразитным колесом.
![]() ;
;
![]() ;
;
![]() ;
;
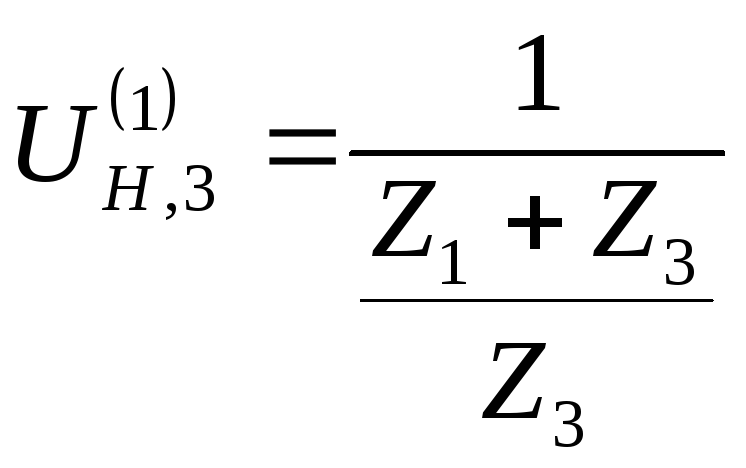


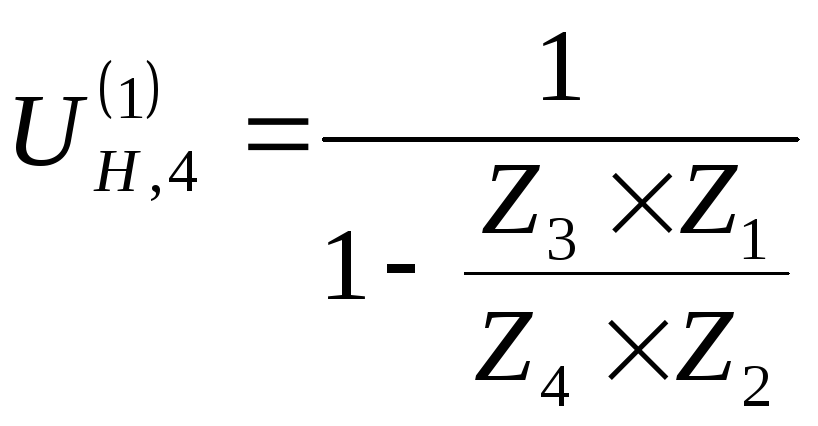
Рисунок 1.1 – Планетарный редуктор с одним внутренним и одним внешним зацеплением.
![]() ;
;
![]() ;
;
![]() ;
;
 .
.
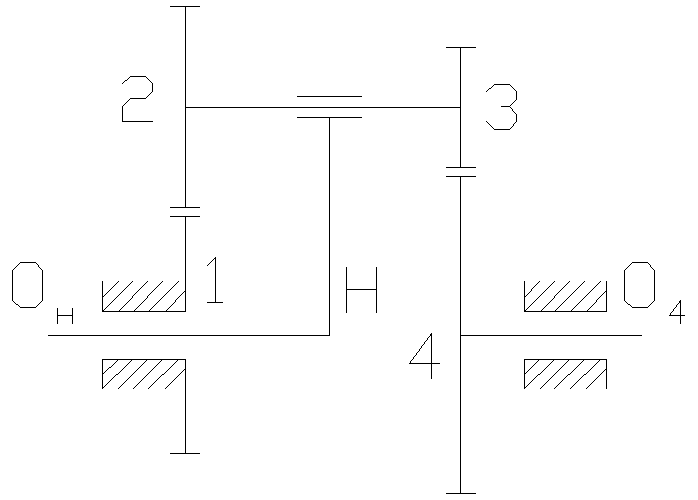
Рисунок 1.1 – Планетарный редуктор с двумя внешними зацеплениями.
![]() ;
;
![]() ;
;
![]() ;
;
 .
.
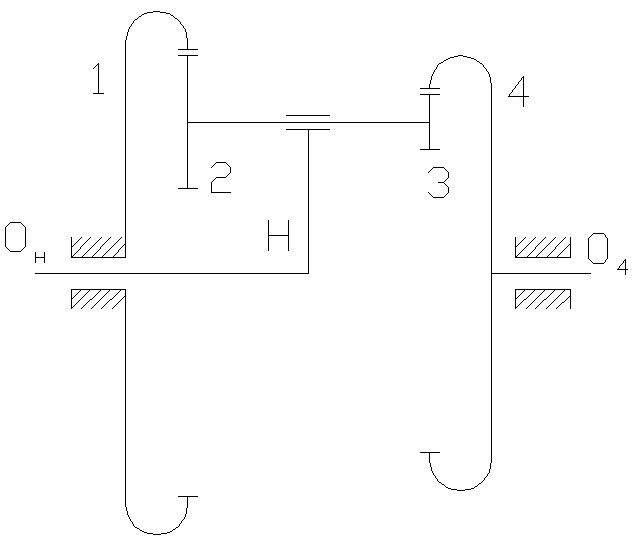
Рисунок 1.1 – Планетарный редуктор с двумя внутренними зацеплениями.
![]() ;
;
![]() ;
;
![]() ;
;

 .
.