

1 Структурный анализ механизма
 1)
Схема мех-ма
1)
Схема мех-ма
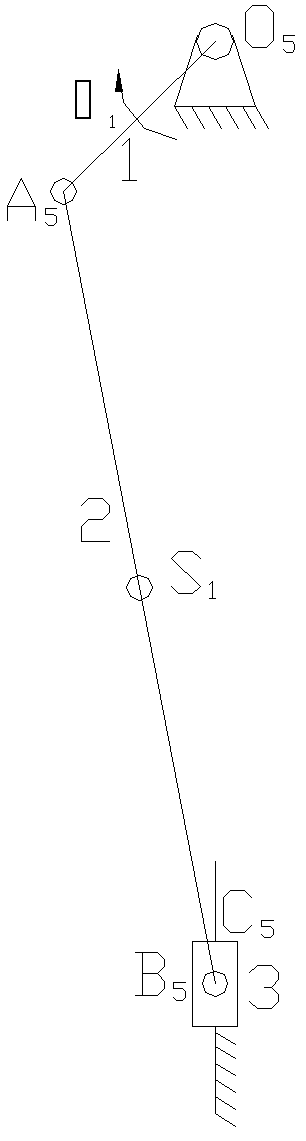
Рисунок 1.1 - Структурная схема кривошипно-ползун-ного механизма
1 – кривошип – совершает полный оборот вокруг своей оси;
2 – шатун – звено, которое совершает плоско-параллельное движение;
3 – ползун – совершает возвратно-поступательное движение;
О
 ,
А
,
А ,
В
,
В – кинематические пары 5-го класса,
низшие вращательные;
– кинематические пары 5-го класса,
низшие вращательные;
С![]() - кинематическая пара 5-го класса, низшая,
поступательная;
- кинематическая пара 5-го класса, низшая,
поступательная;
W=3n-2P
 -P
-P =3•3-2•4-0=1
=3•3-2•4-0=1
где: n-число подвижных звеньев;
P![]() -
число кинематических пар четвертого
класса;
-
число кинематических пар четвертого
класса;
P![]() -
число кинематических пар пятого класса;
-
число кинематических пар пятого класса;
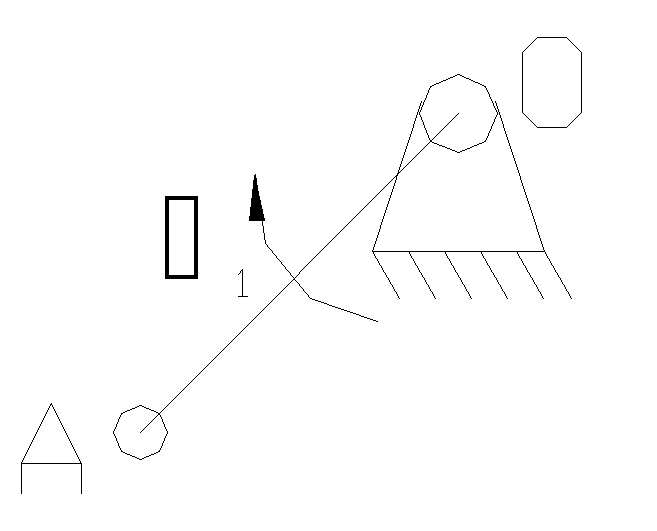
Лишних степеней свободы нет;
6) Пассивных связей нет;
Высших кинематических пар нет;
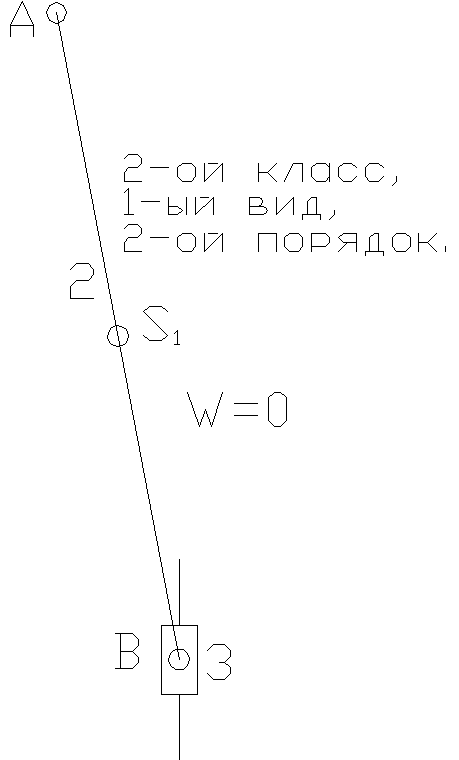
Отсоединили группу Ассура 2-го класса, состоящую из звеньев
2,3 осталось ведущее звено и стойка
W=3n-2P![]() -P
-P![]() =3•1-2•1-0=1
=3•1-2•1-0=1
Групп Ассура 3-го класса нет
Групп Ассура 4-го класса нет
2-ойкласс механизма, потому что наивысший класс группы Ассура, который входит в состав механизмавторой.
2.Кинематический анализ механизма.
 Определение
недостающих размеров
Определение
недостающих размеров
Длина кривошипа, м
![]() (1.1)
(1.1)
где: S-ход ползуна
![]()
Длина шатуна, м
![]() (1.2)
(1.2)
где:
![]() -
действительная длина звеньев АВ
механизма, м;
-
действительная длина звеньев АВ
механизма, м;
![]() -
действительная длина звеньев ОА
механизма, м;
-
действительная длина звеньев ОА
механизма, м;
![]() -отношение
дины кривошипа к длине шатуна
-отношение
дины кривошипа к длине шатуна
![]()
Расстояние центра масс шатуна от точки А кривошипа, м
![]() ,
м (1.3)
,
м (1.3)
![]()
2.1 Определение перемещений
Масштабный коэффициент перемещений, м/мм
![]() (2.1)
(2.1)
где:
![]() -
длина шатуна, м;
-
длина шатуна, м;
![]() -
длина отрезка, изображающего шатун на
чертеже, мм.
-
длина отрезка, изображающего шатун на
чертеже, мм.
![]()
Длина кривошипа на чертеже, мм
![]() (2.2)
(2.2)
где:
![]() - длина кривошипа, м;
- длина кривошипа, м;
![]() -
масштабный коэффициент перемещений,
м/мм.
-
масштабный коэффициент перемещений,
м/мм.
![]() мм;
мм;
Расстояние центра масс шатуна от точки А кривошипа на чертеже, мм
![]() (2.3)
(2.3)
где:
![]() -
расстояние центра масс шатуна от точки
А кривошипа, мм;
-
расстояние центра масс шатуна от точки
А кривошипа, мм;
![]() -
масштабный коэффициент перемещений,
м/мм.
-
масштабный коэффициент перемещений,
м/мм.
![]() мм;
мм;
 Таблица
2.1- Величины отрезков, показывающих в
масштабе
Таблица
2.1- Величины отрезков, показывающих в
масштабе
![]() =0,01
м/мм размеры звеньев кривошипно-ползунного
механизма на чертеже
=0,01
м/мм размеры звеньев кривошипно-ползунного
механизма на чертеже
|
|
|
|
|
|
|
0,39 |
1,56 |
0,78 |
|
|
39 |
156 |
78 |
Строим восемь положений механизма . За нулевое положение принята верхняя мертвая точка ползуна.
Выбираем
на чертеже положение неподвижной точки
О и направляющей ХХ. Проводим окружность
радиусом
![]() =39мм
и делим ее на 8 частей. Из точек
=39мм
и делим ее на 8 частей. Из точек
![]() ,
,![]() ,
,![]() ,…,
,…,![]() радиусом
радиусом
![]() =156мм
отмечаем положение ползуна
=156мм
отмечаем положение ползуна
![]() ,
,![]() ,
,![]() ,…,
,…,![]() ,
получим 8 положений механизма. Третье
положение механизма, заданное для
силового расчета, выделим более толстой
линией.
,
получим 8 положений механизма. Третье
положение механизма, заданное для
силового расчета, выделим более толстой
линией.
2.2. Определение скоростей
Определение скорости ведущего звена
Скорость в точке О=0;
Скорость точки А вычисляется из уравнения (2.4)
![]() ;
(2.4)
;
(2.4)
где:
![]() -относительная
скорость (характеризует скорость в
точке А относительно точки О)
-относительная
скорость (характеризует скорость в
точке А относительно точки О)
![]() ;
(2.5)
;
(2.5)
где:
![]() -
угловая скорость
кривошипа, рад
-
угловая скорость
кривошипа, рад![]() ;
;
![]() -
длина кривошипа, м;
-
длина кривошипа, м;
![]() ;
(2.6)
;
(2.6)
где:
![]() -
частота вращения кривошипа, об/мин.
-
частота вращения кривошипа, об/мин.
n=1500 об/мин.
![]() ;
;
![]() ;
;
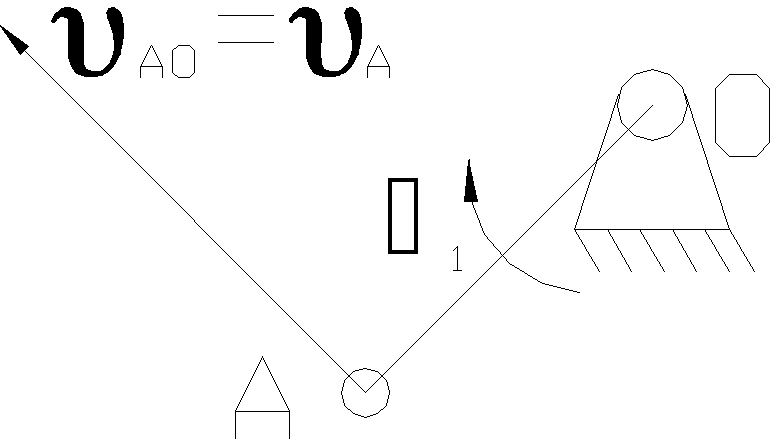
Рисунок 2.1- определение скорости ведущего звена
Определение скоростей группы Асура
Скорость точки В
вычисляется из уравнения (2.7)
![]() ;
(2.7)
;
(2.7)
и условия
![]() ,
,
где:
![]() -
вектор скорости точки А;
-
вектор скорости точки А;
![]() -вектор
скорости точки В относительно точки А;
-вектор
скорости точки В относительно точки А;
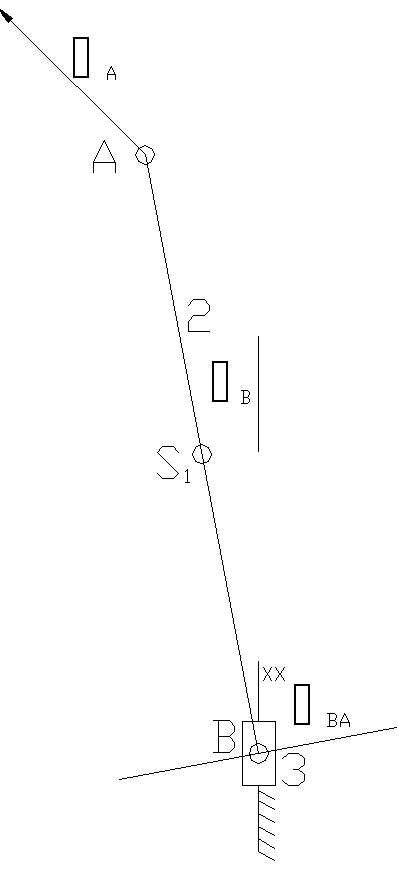
Рисунок 2.2 Определение скорости группы Ассура
Выбор масштаба скоростей
![]() ;
(2.8)
;
(2.8)
где:
![]() -
численное значение вектора скорости
точки А, м/с;
-
численное значение вектора скорости
точки А, м/с;
 -
длина отрезка, изображающего на чертеже
вектор скорости точки А, мм
-
длина отрезка, изображающего на чертеже
вектор скорости точки А, мм
![]()
 Выберем
на чертеже полюс плана скоростей и
параллельным переносом векторов строим
план скоростей (рисунок 2.3)
Выберем
на чертеже полюс плана скоростей и
параллельным переносом векторов строим
план скоростей (рисунок 2.3)
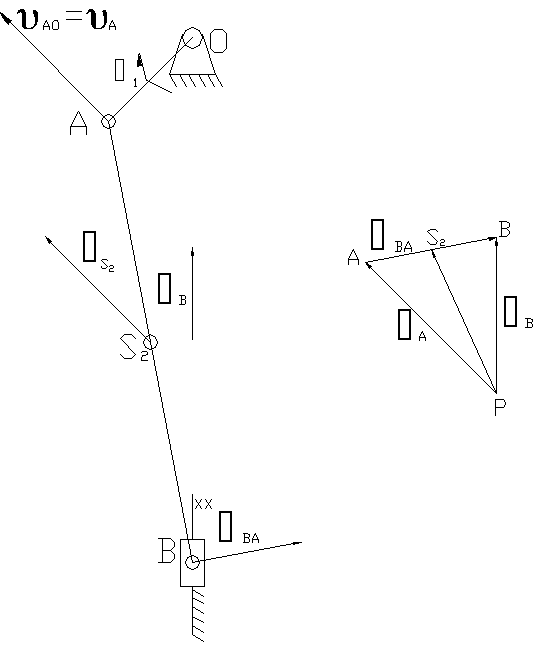
Рисунок 2.3 построение плана скоростей
Скорость
точки
![]() находим
из теоремы подобия (2.9).
находим
из теоремы подобия (2.9).
![]() мм;
(2.9)
мм;
(2.9)
где:
![]() -
расстояние точки
-
расстояние точки
![]() от
точки А на чертеже плана скоростей,
от
точки А на чертеже плана скоростей,
![]() -
расстояние центра масс шатуна от точки
А кривошипа, м;
-
расстояние центра масс шатуна от точки
А кривошипа, м;
АВ- длина шатуна, м;
ab- величина отрезка на чертеже, изображающего вектор скорсти точки В относительно точки А, мм.
Соединив
точку
![]() с
полюсом Р, получим графическое изображение
вектора скорости точки
с
полюсом Р, получим графическое изображение
вектора скорости точки
![]() .
Значения скоростей точек определяем
измерением отрезков на чертеже с учетом
масштабного коэффициента.
.
Значения скоростей точек определяем
измерением отрезков на чертеже с учетом
масштабного коэффициента.
 Угловая
скорость шатуна,
Угловая
скорость шатуна,
![]()
![]() ;
(2.10)
;
(2.10)
где:
![]() -
численное значение вектора скорости
точки В относительно точки А, м/с;
-
численное значение вектора скорости
точки В относительно точки А, м/с;
![]() -
длина шатуна, м.
-
длина шатуна, м.
Планы скоростей для остальных 7 положений механизма строятся аналогично.
Величины отрезков, изображающих на чертеже скорости характерных точек механизма и численные значения скоростей заносим в таблицы 2.2 и 2.3 .
 Таблица
2.2- Величины отрезков, изображающих в
масштабе
Таблица
2.2- Величины отрезков, изображающих в
масштабе
![]() скорости
скорости
![]() ,
,![]() ,
,![]() и
и
![]()
|
Отрезок |
Значение отрезка в положении | |||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 | |
|
оа, мм |
61,26 | |||||||
|
ob, мм |
0 |
51,1 |
61,26 |
35,54 |
0 |
35,54 |
61,26 |
51,1 |
|
|
30,63 |
51,94 |
61,26 |
44,98 |
30,63 |
44,98 |
61,26 |
51,94 |
|
ab, мм |
61,26 |
44,01 |
0 |
44,01 |
61,26 |
44,01 |
0 |
44,01 |
|
|
30,63 |
22 |
0 |
22 |
30,63 |
22 |
0 |
22 |
Таблица
2.3- Численные значения скоростей
![]() ,
,![]() ,
,![]() и
и
![]()
|
Скорость |
Значение скорости в положении | |||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 | |
|
|
61,26 | |||||||
|
|
0 |
51,1 |
61,26 |
35,54 |
0 |
35,54 |
61,26 |
51,1 |
|
|
30,63 |
51,94 |
61,26 |
44,98 |
30,63 |
44,98 |
61,26 |
51,94 |
|
|
61,26 |
44,01 |
0 |
44,01 |
61,26 |
44,01 |
0 |
44,01 |
 Определяем
угловые скорости шатуна
Определяем
угловые скорости шатуна
![]() в
заданных положениях механизма
в
заданных положениях механизма
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Таблица
2.4- Значения угловых скоростей
![]() шатуна
шатуна
|
Величина
угловой скорости
| |||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
39,27 |
28,21 |
0 |
28,21 |
39,27 |
28,21 |
0 |
28,21 |