

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdf7.4.5.Палубный самолет дальнего радиолокационного обнаружения
иуправления «Хокай-2000» с БРЛС типа АФАР
Комплекс «Хокай-2000» является модернизированным (пятое поколение) вариантом системы Е-2С (рис. 7.13).
Рис. 7.13
Основные ТТХ палубного самолета «Хокай» (экипаж самолета состоит из двух летчиков и трех операторов) представлены ниже:
Максимальная взлетная масса |
24,6 τ |
Максимальная скорость полета на высоте 4000 м |
600 км/ч |
Крейсерская скорость |
576 км/ч |
Продолжительность патрулирования на удалении 370 км от корабля |
5,5 ч |
Практический потолок |
8,8 км |
Максимальная перегоночная дальность полета |
2700 км |
Геометрические размеры: |
|
длина фюзеляжа |
17,54 м |
размах крыла/в сложенном положении |
24,56/8,94 м |
высота (с учетом обтекателя РЛС) |
5,58 м |
Главными задачами при модернизации комплекса Е-2С по программе соз дания системы «Хокай-2000» и в дальнейшем «Усовершенствованный «Хо кай», являются:
1) обеспечение обнаружения воздушных целей всех типов как над мор ской поверхностью, так и в приобрежных зонах и над земной поверхностью со сложным рельефом местности;
2) увеличение в 1,5 раза дальности обнаружения и сопровождения мало размерных, малозаметных, малоскоростных и высокоскоростных воздушных целей и надводных целей (ракетных и торпедных катеров, перископов подвод ных лодок, малых судов в прибрежной зоне);
3) обнаружение момента пуска и сопровождение противокорабельных и крылатых ракет с различных носителей (воздушных, морских);
4)увеличение одновременно сопровождаемых воздушных целей (до 2600);
5)повышение помехозащищенности и электромагнитной совместимости за счет пространственно-временной обработки сигналов.
Элементы бортового радиоэлектронного комплекса условно сведены в шесть основных взаимосвязанных подсистем: обнаружения, опознавания, нави гации, связи и передачи данных, обработки данных, отображения и управления.
Главным отличием комплекса оборудования «Усовершенствованный Хокай» является использование новой импульсно-доплеровской БРЛС с активной фа зированной антенной решеткой AN/APS-XX.
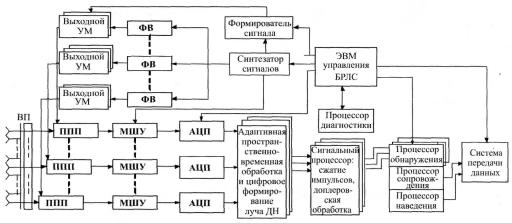
Как и ранее, антенная решетка расположена во вращающемся обтекателе размером 7,32 χ 0,77 м и имеет антенную структуру из 18 элементов, работаю щих в Р-диапазоне (415.. .450 МГц). Структура БРЛС показана на рис. 7.14.
Рис. 7.14
Высокостабильный опорный генератор и синтезатор сигналов обеспечи вают когерентность всего тракта РЛС и формирование всех высокочастотных сигналов и сигналов синхронизации.
При помощи фазовращателей ФВ обеспечивается требуемое фазовое рас пределение излучаемой ЭМВ на апертуре антенны и, соответственно, положе ние по азимуту и форма ДН антенны на передачу. Формирователь зондирую-
щего сигнала и усилители мощности передающих модулей обеспечивают не обходимую форму и мощность излучаемых импульсов.
При приеме отраженной ЭМВ каждый элемент антенной решетки при по мощи переключателей прием-передача ППП подсоединяется на вход своего малошумящего усилителя МШУ. На выходе МШУ аналоговые сигналы при помощи АЦП преобразуются в цифровые сигналы.
Соединение элементов антенной решетки с приемопередающими модуля ми осуществляется через вращающийся переход ВП.
Диаграмма направленности на прием формируется в цифровом виде про цессором.
При механическом круговом вращении антенной решетки со скоростью 6 об/мин (один оборот за 10 с) одновременно может проводиться электронное сканирование ДН в секторе ±60° с различной скоростью.
Адаптивная пространственно-временная обработка сигналов обеспечивает: 1) формирование нулей ДН антенны в направлении источников помех
(станции РЭП; телевизионные, связные и другие станции, работающие в этом же диапазоне частот);
2)оптимизацию селекции сигналов воздушных и надводных целей на лю бом мешающем фоне;
3)повышение эффективности обнаружения и захвата сигналов малораз мерных целей и точности измерения координат.
Процессоры сопровождения и наведения обеспечивают решение задач целеуказания и наведения своих истребителей и ракет на воздушные и мор ские цели.
Преимуществом новой РЛС является возможность изменения в широком диапазоне параметров сигналов излучения и алгоритмов обработки. Пере стройка несущей частоты производится от одной когерентной пачки импульсов
кдругой. Модуляция сигнала внутриимпульсная, частотная 0,5...3,5 МГц (ко эффициент сжатия импульсов 100...700). Длительность зондирующих импуль сов 1...20; 50; 100 и 150 мкс, частота повторения импульсов 125... 1500 Гц. Вы бор сигналов проводится в зависимости от решаемых задач и сложившейся ра диоэлектронной обстановки.
Дальность обнаружения малоразмерной низколетящей цели составляет 340 км (максимальная дальность действия - 620 км), а разрешающая способ ность по дальности — 45 м.
Дальнейшая модернизация комплекса «Хокай» предполагает использовать в надфюзеляжном обтекателе три неподвижных АФАР в виде равностороннего треугольника, что обеспечит электронное сканирование ДН антенны в круго вом секторе. Диапазон рабочих частот АФАР будет изменен в сторону L-, S-диапазонов.
7.4.6.Самолет базовойпатрульнойавиации Р-8А «Посейдон»
ВСША разработан новый самолет БПА Р-8А «Посейдон», который дол жен заменить существующие самолеты Р-ЗС «Орион». Важной особенностью нового самолета является применение в составе бортового разведывательного оборудования РЛС, имеющей возможность вести разведку в режимах синтези рования апертуры и инверсного синтезирования. Последний режим особенно эффективен при решении задач по разведке надводных целей (включая задачу обнаружения перископов подводных лодок).
Бортовая радиолокационная система РЛС AN/APY-10, которая является модернизированным вариантом AN/APS-137(V)S, была разработана как поис ковая, способная обнаруживать и сопровождать наземные цели, перископы и шноркели подводных лодок. Она имеет широкие возможности в плане иденти фикации обнаруженных целей, оценки боевых потерь и слежения. Более эф фективное обнаружение перископов подводных лодок обеспечивается за счет использования цифрового сканирующего конвертера и малошумящего предусилителя на входе. Архитектура ИРСА позволяет вести съемку с высоким раз решением, повышает возможности по распознаванию (классификации) малых быстродвижущихся целей, располагающихся недалеко от берега. Основные функциональные возможности РЛС:
1) обнаружение и слежение за наземными (надводными) целями на боль шом расстоянии;
2)более надежное обнаружение перископов;
3)ведение морской разведки с большой высоты;
4)сопровождение множественных целей;
5)высокая устойчивость к подавлению и противодействие ложным целям;
6)управление на программном уровне;
7)совместимость с системами управления ракетами «Гарпун», «Томахок»
идругими;
прямое взаимодействие с системами управления оружием. Радиолокационная система работает в режимах:
РСА (длительность импульса 13,2 мкс, средняя мощность 350 Вт, разре шение 2.. .200 м, частота следования импульсов зависит от дальности);
ИРСА (соответственно 10 мкс, 230...500 Вт; разрешение 0,6...1,2 м и 500... 1000 Гц);
обнаружение перископов (5 мкс, 460 Вт и 1,854 кГц); поиск/навигация (10 мкс, 200 Вт и 388 Гц).
Также планируется оснастить самолет комплексом электронного противо действия, состоящим из системы управления средствами РЭБ AN/ALQ-213 (V), системы направленных ИК-помех, системы предупреждения о радиолокацион ном облучении и системы постановки активных помех.
7.4.7.Информационно-разведывательные комплексы на аэростатах и дирижаблях
Аэростаты и дирижабли, оснащенные информационно-разведывательны ми комплексами, могут обеспечить выполнение функциональных задач ком плексов типа Авакс, Хокай и Джистарс.
Главным преимуществом таких комплексов по сравнению с авиационны ми является возможность непрерывного при неограниченной длительности контроля воздушного, надводного и наземного пространства в заданной зоне ответственности при минимальной стоимости жизненного цикла (создания, применения и технической эксплуатации). Так, стоимость эксплуатации аэро статного комплекса в течение года может быть на порядок меньше эксплуата ции комплекса типа АВАКС, а стоимость обеспечения зоны обзора протяжен ностью 1000 км - в три раза меньше.
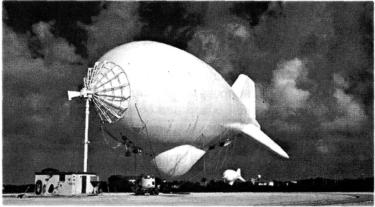
Примером использования таких комплексов служит создаваемая сеть TARS (Tethered Aerostat Radar System - радиолокационная система на привяз ных аэростатах) на южной границе США. Привязной аэростат 420К объемом 11340 м заполнен гелием и имеет аэродинамическую форму корпуса длиной 62,7 м и максимальным диаметром 20,7 м (рис. 7.15).
Рис. 7.15
Аэростаты поднимаются на высоты 3,0...4,5 км и опускаются при помощи лебедки. Они могут непрерывно находиться в воздухе 5...7 дней. Электропита ние подается по кабель-тросу. В случае неблагоприятных погодных условий (тайфуны) аэростаты опускают и швартуют к причальной мачте. Для южных штатов США, где расположены аэростаты, их боеготовность составляет 98%. Полезная нагрузка на рабочей высоте составляет 480 кг.
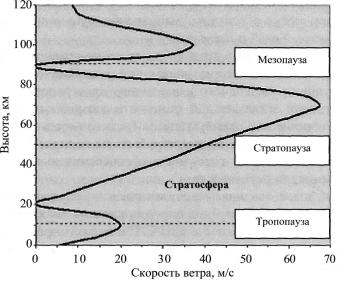
Фирма «Локхид-Мартин» разрабатывает проект аэростата, который может подниматься на высоту 20...22 км, где практически отсутствует ветер (рис. 7.16), что обеспечивает устойчивость положения аэростата.
Рис. 7.16
Основной проблемой в этом случае является возможность автономного электроснабжения.
Комплекс 420К оснащен радиолокатором L-88(V)3, расположенным в нижней части аэростата в радиопрозрачной гондоле. РЛС имеет антенну с раз мером апертуры 8,7 м. Круговой обзор для обнаружения низколетящих целей обеспечивается механическим вращением антенны.
Дальность зоны обзора 370 км определяется радиогоризонтом. Рассматриваются также варианты использования РЛС L-диапазона с ан
тенной типа АФАР цилиндрической формы, размещаемой в радиопрозрачном обтекателе того же размера.
Наряду с аэростатами рассматривается возможность использования авто матических высотных дирижаблей для размещения информационно-разведы вательных комплексов. По сравнению с аэростатами они обладают большей оперативностью, автономностью, большей грузоподъемностью. Всепогодное, круглосуточное электроснабжение при полетах на высотах 20-22 км обеспечи вается солнечными батареями большой площади и электрогенераторами. Ком плексы на дирижабле могут непрерывно работать в течение нескольких меся цев и даже лет [4] (рис. 7.17). Дальность обзора низколетящих, морских и на земных целей на таких высотах достигает 600 км.
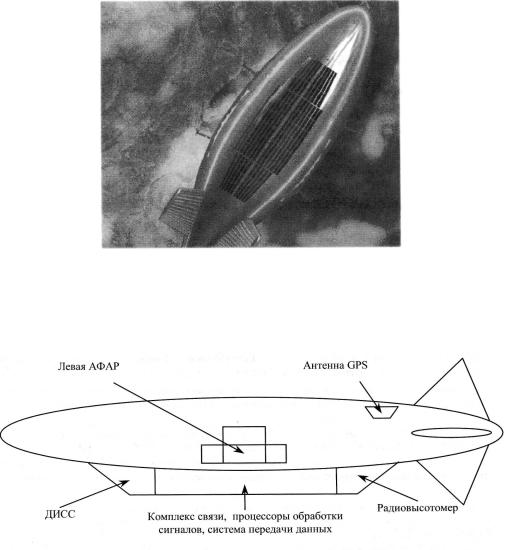
Рис. 7.17
Радиолокаторы комплексов будут иметь антенны типа АФАР с излучате лями, размещенными на боковой поверхности дирижабля (рис. 7.18).
Рис. 7.18
Детальное наблюдение морских и наземных целей обеспечивается в ре жиме синтезирования апертуры при работе в Х-диапазоне, что позволяет полу чить разрешение (детальность изображения) 1,5...15 м в зоне обзора по даль ности 20 и 200 км. Дирижабль в этом режиме должен двигаться со скоростью
100км/ч.
Вэтом режиме обеспечивается обнаружение малоразмерных наземных целей (танков, БМП, ЗРК и т. п.). Режим селекции движущихся целей позволя-
ет выделять цели, имеющие радиальную скорость от 1,0 до 200 км/ч. В интерферометрическом режиме измеряется высота рельефа местности с точно стью 10... 15 м.
Разведывательно-информационные комплексы, размещаемые на аэроста тах и дирижаблях, дополняют авиационные комплексы типа АВАКС и Джистарс, обеспечивая длительное непрерывное патрулирование в дежурном ре жиме. Кроме РЛС комплекс содержит тепловизор, телевизионную систему, станции РТР и радиоразведки, в том числе сотовой связи, измеритель радиа ции. Дополнительными задачами комплекса являются метеонаблюдение и ретрансляция.
Литература
1.Верба В. С. Тенденции развития авиационных средств разведки и дозора. - Наукоемкие тех нологии, 2004, №8-9.
2.Верба B.C., Гандурин В.А., Трофимов А.А. Бортовая РЛС для перспективного многофункцио нального авиационного комплекса разведки, оповещения и управления (МАК РОУ) с цифро вой АФАР. - Наукоемкие технологии, 2004, № 8 - 9.
3.Верба B.C., Мирошничен А.В., Морозов Ю.А. Выбор варианта бортовой РЛС с АФАР для многофункционального авиационного комплекса разведки, оповещения и управления. - Ра диотехника, 2006, № 1.
4.Верба B.C., Гандурин В.А. Радиолокатор с синтезированной апертурой на высотном беспи лотном дирижабле. - Антенны, 2004, № 8 - 9.
5.Верба B.C., Гандурин В.А., Меркулов В.И. Живучесть авиационных комплексов радиолокаци онного дозора и наведения. - Информационно-измерительные и управляющие системы, 2008, т.6, № 3.
6.Верба B.C. Актуальные вопросы создания многофункциональных радиотехнических ком плексов нового поколения. - Наукоемкие технологии, 2006, № 7 - 8.
7.Верба B.C. Перспективы развития систем и комплексов разведки, дозора и управления авиа ционного базирования и проблемы по обеспечению их создания. - Радиопромышленность, 2006, № 1 .
8.Верба B.C. Особенности формирования технического облика радиотехнических комплексов многофункциональных информационно-управляющих средств воздушного базирования. - Радиотехника, 2005, № 5.
9.Виноградов М.А. Перспективные комплексы воздушной радиолокационной разведки веду щих зарубежных стран. - Зарубежное военное обозрение, 2007, №21.
ГЛАВА 8
ТЕНДЕНЦИИ РАЗВИТИЯ СИСТЕМ КОМАНДНОГО УПРАВЛЕНИЯ АВИАЦИОННЫХ КОМПЛЕКСОВ РАДИОЛОКАЦИОННОГО ДОЗОРА И НАВЕДЕНИЯ
•
8.1. Основные направления совершенствования методов наведения
В существующих АК РЛДН [2, 34] используется ограниченный набор ме тодов наведения, ориентированный только на наведение истребителей на неманеврирующие воздушные цели в дуэльной ситуации. В то же время методы наведения, предназначенные для использования в АК РЛДН нового поколения, должны удовлетворять существенно большему перечню разнородных и часто противоречащих друг другу требований, отражающих необходимость наведе ния ЛА как на одиночные, так и на групповые воздушные и наземные цели, в том числе и сверхманевренные и гиперзвуковые, в условиях воздействия средств РЭП противоборствующей стороны. Кроме того, необходимо прини мать во внимание перспективу включения АК РЛДН в состав глобальной сетецентрической информационно-управляемой системы [5] с учетом экономиче ских и технологических факторов [13, 14].
В таких условиях использовать методы наведения, адекватно соответст вующие каждому конкретному типу целей и конкретным условиям их примене ния, с различным информационным обеспечением, нерационально. В то же вре мя использование единого универсального метода наведения, одинаково пригод ного для всех случаев, является весьма проблематичным. Наиболее рационально использование нескольких методов наведения, каждый из которых обслуживает достаточно большой набор целей в различных условиях их применения.
Целесообразно использование трех групп методов, один из которых обес печивает наведение на все типы воздушных целей, включая сверхманевренные и гиперзвуковые; второй реализует наведение самолетов на наземные объекты, включая и подвижные и малоразмерные. Третий тип способов наведения дол жен обеспечивать наведение средств поражения с ударных БЛА. Необходимо отметить, что управление несколькими ЛА в варианте многопозиционного наведения на воздушные и наземные объекты может быть получено на основе
первых двух групп методов. При этом координированное наведение несколь ких групп ЛА с одновременным выводом на одну цель может быть получено как частный случай многопозиционного наведения.
Следует подчеркнуть, что проблема разработки перспективных методов наведения имеет два аспекта: управленческий и информационный.
Первый из них связан с разработкой алгоритма траекторного управления, реализующего возможности наведения определенных типов ЛА на определен ные типы цели в конкретных условиях.
Второй аспект связан с возможностью реализации алгоритмов оценива ния всех фазовых координат, используемых в алгоритмах наведения, в тех же условиях применения, в том числе и в условиях радиопротиводействия.
В общем случае методы наведения должны обеспечивать:
1)минимум времени наведения;
2)максимальную дальность действия системы командного радиоуправления;
3)минимальные мгновенные перегрузки объекта управления;
4)минимальный расход энергии управляющих сигналов; практическую реализуемость;
5)инвариантность системы радиоуправления к условиям применения
6)сопряжение с методами самонаведения, используемыми в дальнейших этапах наведения ВЦ.
Для выполнения первых четырех требований траектория наведения должна быть как можно более прямолинейной. Практическая реализуемость подразумевает возможность формирования оценок всех требуемых фазовых координат относительного и абсолютного движения цели и ОУ при сущест вующих измерителях, реальных объемах памяти и быстродействии бортовых вычислителей и реальных расходах энергии на управление. Инвариантность предусматривает возможность выполнения наведения во всем требуемом диа пазоне дальностей, скоростей и высот независимо от условий применения. При этом наибольшее значение имеют всеракурсность перехвата и обеспечение вы сокой чувствительности метода к ошибкам управления как на больших, так и на малых расстояниях при наведении и на малоподвижные и интенсивно ма неврирующие цели.
Большое значение имеет также сопряжение методов командного наведе ния и используемых в дальнейшем методов самонаведения, при котором обес печивается органичный (без существенных переходных процессов) переход авиационной системы радиоуправления наводимых ЛА от этапа дальнего к этапу ближнего наведения. Такое сопряжение в свою очередь обеспечивается не только методами дальнего и ближнего наведения, но и типом визирной сис темы, используемой для поиска, обнаружения и автоматического сопровождения целей, а также возможностями командной радиолинии управления (п. 5.5). От метим, что наибольшую вероятность выполнения дальнего наведения обеспе-