

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfпериодически передаются заданные значения курса, высоты и скорости, мето дика формирования которых изложена в п.п.5.2.2.
Более сложная задача управления самолетами возникает при одновремен ном наведении групп истребителей на групповые цели. В этом случае применя ется координированное наведение.
Координация должна обеспечить одновременный вывод истребителей в заданные районы относительно цели и под заданными углами атаки. При этом желательно, чтобы истребители выходили в зону атаки цели с разных сторон. В частности, при назначении трех групп истребителей для координированного воздействия целесообразно, чтобы одна из них выводилась в зону атаки цели под ракурсом, близким к нулю [19] (см. рис. 5.7).
Траектории наведения строятся на основе алгоритмов, рассмотренных в п.5.2, в том числе и в виде «прямая-разворот-прямая» [19]. Изменяя длину по следнего прямолинейного участка (рис. 5.3), можно достичь выполнения усло вия одновременности атаки при маневрах цели. При реализации метода наве дения используется рассчитанный путь атаки 1, а также заданные величины на правления угла атаки и радиуса разворота. Первоначальная величина 1 определяется при решении задачи назначения из условия парирования манев ров цели по курсу в некотором диапазоне. На конечном этапе наведения на сгруппированные цели можно указывать конкретные номера воздушных объ ектов, входящих в группу.
Следует отметить, что для группирования маневрирующих групп целей могут быть использованы не только критерии, рассмотренные в п.5.3, но и бо лее сложные критерии, в том числе и линейно-квадратичные функционалы, по зволяющие оценить принадлежность самолетов к группе на упреждающие мо менты времени.
Необходимо подчеркнуть, что для повышения живучести системы «АК РЛДН - наводимые самолеты» целесообразно использовать приемы повышения скрытности наведения, рассмотренные в п.8.2. Среди этих приемов наиболее простым является наведение перехватчиков непосредственно в об ласть пуска ракет (см. рис. 8.1). Весьма перспективными является использова ние обхода зон тактического превосходства воздушного противника, если тот обладает РЛС и средствами поражения с лучшими показателями. Решение об обходе принимается штурманом наведения АК РЛДН по результатам иденти фикации обнаруженных целей. Если перехват воздушных целей выполняется в зоне обнаружения АК РЛДН противника, то траектории наведения наших ис требителей должны выбираться по принципу обеспечения максимума времени их пребывания в зонах режекции его бортовой РЛС.
Управление истребителями прикрытия, предназначенными для оборо ны АК РЛДН, осуществляется с его борта [2]. Истребители прикрытия, как правило, обладают мощным ракетным вооружением, развитыми системами
управления им, эффективными системами радиоэлектронного противодействия и связи, а также большим временем полета. При построении алгоритмов управ ления истребителями прикрытия учитываются следующие соображения:
опасная для самолета АК РЛДН цель (группа опасных целей) будет оказы вать активное огневое, маневренное и помеховое противодействие атакующему ее истребителю прикрытия (группе истребителей прикрытия);
после пуска ракет по самолету АК РЛДН его последующее уклонение не эффективно.
Отсюда вытекают следующие требования к алгоритмам управления ис требителями прикрытия:
1) алгоритмы управления истребителями прикрытия должны обеспечивать преимущество над опасными целями по энергетическим и тактическим харак теристикам;
2)алгоритмы управления должны быть ориентированы на работу с оди ночными и групповыми целями;
3)время поражения опасных целей должно быть минимально.
Последнее требование связано с дефицитом времени, как правило, возни кающим при применении истребителей прикрытия.
Процесс управления истребителями прикрытия условно разбивается на два этапа: этап назначения на опасные цели и этап собственно наведения на опасные цели. Результат работы алгоритма назначения состоит в опреде лении связок номеров опасных целей и истребителей прикрытия, которые яв ляются рекомендациями и могут быть отменены или скорректированы штур маном наведения.
Наведение истребителей прикрытия на опасные цели имеет ряд особенно стей, связанных с неопределенностью информации о намерениях опасных це лей, поэтому требуется статистическое прогнозирование поведения цели до момента окончания наведения истребителей. Наведение истребителя прикры тия на опасную цель может осуществляться любым из известных методов, од нако при этом необходимо учитывать возможность выполнения маневра целью при атаке АК РЛДН. Необходимо отметить, что весьма эффективным способом срыва атаки истребителей противника самолетами прикрытия является приме нение в качестве средств поражения СВЧ-оружия ФП [15], обеспечивающего вывод из строя информационных систем цели.
Рассмотрим управление истребителями при уничтожении постанов щиков активных помех. Если информационная система АК РЛДН не обеспе чивает триангуляцию помехопостановщика [34], то на вход алгоритма форми рования команд наведения поступает только его пеленг. Истребитель, отраба тывая плавные команды ψτ, VT, HT, выводится на линию пеленга по кратчайшей траектории и далее удерживается вблизи этой линии. Кроме того, возможен и другой способ наведения, когда истребитель выводится по крат-
чайшему расстоянию на линию, параллельную текущему пеленгу на постанов щик помех. При достижении расстояния до линии пеленга, меньшего дально сти обнаружения БРЛС, истребителю передаются команды целеуказания по азимуту β и углу места ε со значениями команд, соответственно равными β = ψτ, ε = 0. Летчик включает режим излучения БРЛС, которая осуществляет поиск и обнаружение постановщика помех.
При дозаправке в воздухе могут быть две ситуации [34]: ^топливозап равщик в зоне топливозаправки; 2) топливозаправщик на маршруте. При нахо ждении топливозаправщика в зоне заправки истребитель сначала выводится на него методом погони, а затем методом маневра в заднюю полусферу. Во вто ром случае алгоритм сразу строит траекторию встречи методом маневра в зад нюю полусферу. Для обеспечения встречи конечная скорость заправляемого самолета задается больше скорости топливозаправщика.
Исходными данными для решения задачи вывода самолетов ударной авиации в районы наземных и надводных целей является [34] маршрут: по следовательность маршрутных точек, определяемых координатами, скоростью и высотой полета на последующем участке маршрута, типом точки. В состав маршрута могут входить участки, проходимые самолетом как на дозвуковой скорости, так и на сверхзвуковой.
При командном наведении решение задачи вывода самолета в район цели сводится к следующему. В ИВС вычисляется и отображается на индикаторе штурмана наведения текущее положение экстраполяционного маркера, пока зывающего требуемое для своевременного выхода на наземную цель положе ние самолета. С положением экстраполяционного (планового) маркера сопос тавляется реальное положение самолета на каждый момент решения. При от клонениях от плана полета вырабатываются команды скорости и курса, позволяющие устранить имеющееся отклонение. Возможно также решение об ратной задачи: установка маркера в реальное положение самолета с определе нием фактического времени прибытия в район наземной цели и расхождения относительно планового времени.
После вывода ударных самолетов в район цели в дальнейшем, в зависимо сти от режимов работы их бортовых РЛС и используемых средств поражения, могут быть использованы методы смешанного наведения, основанные на ис пользовании разновидностей алгоритмов траекторного управления (8.13)-(8.18).
Организация управления беспилотными летательными аппаратами
осуществляется следующим образом. Одним из направлений повышения эффек тивности радиолокационной разведки, особенно в зонах повышенной опасно сти, является организация управления с борта АК РЛДН беспилотными лета тельными аппаратами для решения задач по обнаружению и распознаванию наземных целей [34]. Наиболее простым является вариант боевого применения Б Л А, предусматривающий выполнение двух этапов.
На первом этапе осуществляются взлет и полет БЛА по маршруту. Мар шрут полета формируется на борту БЛА по введенной перед взлетом информа ции о маршрутных точках полета. При этом взлет и полет БЛА осуществляют ся по программе. Аналогично осуществляется посадка БЛА.
На втором этапе, когда БЛА находится в зоне предполагаемого боевого применения, управление им берет штурман наведения, находящийся на АК РЛДН. После этого БЛА могут совершать полет по задаваемой штурманом программе или находиться под его непосредственным управлением.
Возможны и другие варианты, в том числе и боевого применения БЛА. При использовании ударных БЛА, предназначенных для уничтожения назем ных объектов в зонах повышенной опасности или на больших удалениях от АК РЛДН, скорее всего будут применяться несколько способов. При использова нии одного из них ударный БЛА пускает ракеты В-П (сбрасывает бомбы), ав томатически наводящиеся на цели в соответствии с командами целеуказаний, поступающими от АК РЛДН. При другом варианте наведения управление пу щенными ракетами осуществляет штурман наведения АК РЛДН, используя трехточечный метод, в соответствии с которым линия визирования ракета-цель должна совмещаться с линией визирования БЛА-цель. Возможен и третий ва риант применения, при котором сам БЛА используется в качестве средства по ражения (режим «камикадзе»).
При использовании перспективных беспилотных истребителей роль АК РЛДН скорее всего будет сводиться к управлению пилотируемым самолетом командира группы.
Управление ведомыми АК РЛДН предполагает одновременную работу нескольких комплексов [34], разнесенных друг от друга на расстояния, при ко торых обеспечивается перекрытие их радиолокационных полей и возможна ор ганизация радиосвязи между ними. При групповых действиях АК РЛДН один из них назначается ведущим, а остальные - ведомыми. Ведущий АК РЛДН осуществляет связь с наземными КП, принимает радиолокационную информа цию от ведомых АК РЛДН, обобщает ее и управляет ведомыми АК РЛДН как источниками информации.
Применение группы АК РЛДН позволяет улучшить управление авиацией, поскольку в зонах перекрытия их радиолокационных полей значительно улуч шаются характеристики трассовой информации о воздушных целях, снижается влияние «слепых» зон РЛС каждого из АК РЛДН на проводку целей в объеди ненной зоне видимости. Величина зоны перекрытия радиолокационных полей соседних АК РЛДН зависит от дальности обнаружения цели определенного класса и от расстояния между АК РЛДН.
Групповые действия целесообразны в тех ситуациях, когда необходимо одновременно использовать два и более комплексов, например для повышения скрытности наведения при работе по радиоизлучающим целям (см. рис. 8.6) и в полу активных режимах (см. рис. 8.3).
При организации взаимодействия группы АК РЛДН с управляющим КП АСУ ведущий АК РЛДН передает на КП обобщенную от нескольких АК РЛДН информацию и принимает распоряжения от КП на выполнение боевых дейст вий каждого из АК РЛДН через один приемопередающий центр.
При групповых действиях АК РЛДН необходимо централизованное управление их полетом, так как для создания сплошного радиолокационного поля большое значение имеют расположение зон барражирования в зоне ответ ственности, вид фигуры барражирования АК РЛДН и синхронность полета взаимодействующих АК РЛДН в зонах барражирования. Реализация централи зованного управления обеспечивается соответствующими алгоритмами траекторного наведения ведущим и ведомыми самолетами АК РЛДН.
8.6. Перспективы развития командных радиолиний управления
Одним из основных направлений улучшения показателей эффективности КРУ является повышение скрытности их работы. Рациональным направле нием повышения скрытности КРУ является усложнение условий обнаружения факта их работы станциями радиотехнической разведки противника.
Это усложнение может быть достигнуто за счет использования сверхши рокополосных сигналов с постоянной спектральной плотностью в пределах ак тивной ширины спектра. Такие сигналы по своему проявлению похожи на бе лый шум, что затрудняет их обнаружение.
Кроме того, в таких сигналах полезная информация распределена по всему спектру, что затрудняет противоборствующей стороне ее выделение и искаже ние даже при обнаружении факта излучения КРУ.
Еще одним направлением повышения скрытности является сокращение области пространства, в пределах которого распространяется сигнал КРУ, за счет использования антенн направленного действия.
Ниже рассматриваются принципы построения и особенности функциони рования КРУ, в которых используются эти способы повышения скрытности.
8.6.1. Командные радиолинии управления со сложными сигналами
Сложные сигналы - сигналы, для которых произведение активной шири ны спектра на их длительность, называемое базой сигнала, существенно пре вышает единицу. Основным достоинством КРУ со сложными сигналами явля ются более высокие скрытность и помехоустойчивость по отношению к узко полосным помехам. Более высокая скрытность КРУ со сложными сигналами достигается за счет повышения энергетической скрытности, уменьшения
сведений о наличии информации и усложнения условий радиоразведки пара метров передаваемых команд.
Повышенная энергетическая скрытность объясняется следующим обра зом. Как известно, вероятность Р0б обнаружения сигнала в смеси с белым шу мом зависит от отношения  - энергии Ер полезного сигнала к спек тральной плотности G0 белого шума для частот
- энергии Ер полезного сигнала к спек тральной плотности G0 белого шума для частот  Когда речь идет о разве дывательном приемнике, под G0 и Ер нужно понимать спектральную плотность его внутреннего шума и энергию полезного сигнала на его входе соответствен но. Если структура сложного сигнала не известна разведывательному приемни ку, то в последнем принцип сжатия сигнала не реализуется, что эквивалентно уменьшению энергии принимаемого сигнала. При этом уменьшение энергии по сравнению со случаем согласованного приема пропорционально отношению ширины спектра сигнала к полосе пропускания разведывательного приемника.
Когда речь идет о разве дывательном приемнике, под G0 и Ер нужно понимать спектральную плотность его внутреннего шума и энергию полезного сигнала на его входе соответствен но. Если структура сложного сигнала не известна разведывательному приемни ку, то в последнем принцип сжатия сигнала не реализуется, что эквивалентно уменьшению энергии принимаемого сигнала. При этом уменьшение энергии по сравнению со случаем согласованного приема пропорционально отношению ширины спектра сигнала к полосе пропускания разведывательного приемника.
Повышение скрытности путем уменьшения сведений о наличии информа ции в данном радиосигнале связано с псевдослучайностью, т. е. с подобием шума сигнала, излучаемого антенной КРУ. При приеме сложных сигналов обычным разведывательным приемником (без осуществления принципа сжа тия) они будут восприниматься как шум. Усложнение условий радиоразведки параметров передаваемых команд при использовании сложных сигналов дос тигается за счет сложной модуляции в передатчике КРУ, характер которой мо жет изменяться по программе в процессе наведения ОУ.
Наиболее часто в качестве сложного сигнала в КРУ используется фазо- кодо-манипулированный (ФКМ) сигнал, представляющий собой пачку радио импульсов со скважностью Q = 1, начальные фазы которых изменяются на 180° при переходе манипулирующего сигнала от положительного значения к отри цательному. Каждый отдельный импульс в пачке называют элементарным. Широкую известность ФКМ-сигналы получили прежде всего потому, что они обеспечивают наименьшую вероятность Р0 ошибочного приема каждого от дельного элементарного импульса с возможными двумя значениями начальных фаз колебаний на фоне стационарного белого шума. Другая причина, вызвав шая большой интерес к ФКМ-сигналам, связана с тем, что они обеспечивают хорошие по форме функции неопределенности. Эти функции оказываются практически такими же, как и для шумовых сигналов. Для получения функции неопределенности, имеющей узкий пик главного лепестка по оси времени и низкий уровень боковых лепестков, гармонический радиосигнал манипулируется по фазе импульсными сигналами, отображающими так называемые дво ичные М-последовательности.
Двоичной М-последовательностью называют формируемую при помощи ре гистра сдвига последовательность видеоимпульсов, имеющую максимально воз можный период ηΜπ· При этом под периодом пМп понимают максимально воз можное число двоичных цифр, после которого последовательность повторяется.
ФКМ-сигналы, получаемые за счет фазовой манипуляции гармонического сиг нала импульсами М-последовательности, принято называть шумоподобными либо псевдослучайными сигналами. Такие названия они получили благодаря тому, что 1) при большом числе элементарных импульсов их функция неопре деленности близка к функции неопределенности шума; 2) спектр таких сигна лов сплошной около каждой гармоники М-последовательности; 3) для разве дывательной радиоаппаратуры такие сигналы представляются случайными, так как нельзя точно предсказать, какой сигнал появится в каждый последующий момент времени.
При построении КРУ двоичные М-последовательности используются сле дующим образом. Электрическим сигналом up, (например, видеоимпульсом) отображающим разряд двоичного кода, который применяется в обычных узко полосных КРУ с КИМ, модулируется двоичная М-последовательность иМп- Та кую модуляцию можно осуществить путем формирования произведения uPuMn· Подобный способ модуляции приводит к тому, что положительный видеоим пульс Up не изменяет полярность М-последовательности, а отрицательным им пульсом Up полярность М-последовательности меняется на противоположную. Модулированная М-последовательность используется для фазовой манипуля ции сигнала несущей частоты, генерируемого радиопередатчиком КРУ. На приемной стороне КРУ со сложным сигналом сначала выделяется модулирую щая М-последовательность, которая затем преобразуется в видеоимпульсы иВи, характеризующие разряды двоичного кода, используемого в шифраторе для передачи количественных значений команд управления. Дальнейшее преобра зование иВи осуществляется так же, как и в КРУ с простыми сигналами и би нарным кодированием передаваемых команд.
Из сказанного выше следует, что в отличие от узкополосной КРУ, в пере дающей установке которой применяется двойная модуляция, для КРУ со слож ным сигналом характерна тройная модуляция. Целесообразным видом тройной модуляции является сочетание кодово-импульсной модуляции, балансной ам плитудной модуляции и фазово-кодовой модуляции (манипуляции). Вместо фазово-кодовой манипуляции можно использовать частотную модуляцию на пряжения несущей частоты в пределах каждого элементарного импульса пачки.
Структурная схема шифратора одноканальной КРУ с ФКМ-сигналами пред ставлена на рис. 8.19 [29]. При этом на схеме не показаны цепи формирования сигналов пословной синхронизации. Для иллюстрации процессов, протекающих в отдельных элементах шифратора, на рис. 8.20 показаны эпюры напряжений.
Шифратор КРУ с КИМ, на который поступает передаваемая команда Ку, является устройством со структурной схемой, изображенной на рис. 5.9 слева от точек ΑΙ, Α2. Если, например, используется трехзначный двоичный код, то при передаче команды Ку, отображаемой двоичным числом 101, на выходе шифратора КРУ с КИМ образуется напряжение иш (А2, рис. 5.9), показанное на рис. 8.20, г.
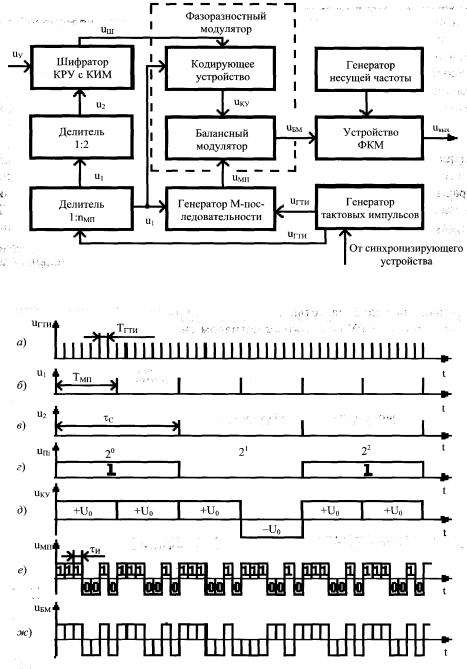
Сигнал иш воздействует на фазоразностный модулятор (ФРМ). На второй вход ФРМ подается напряжение иМп М-последовательности, период пм п кото рой для конкретности последующих рассуждений принят равным семи (рис. 8.20, е). Предполагается, что в генераторе М-последовательности исполь зуется регистр сдвига с обратной связью через сумматоры по модулю два. Пе редвигающими импульсами для регистра сдвига являются тактовые импульсы игти с периодом следования  (рис. 8.20, а), а импульсами запуска генерато ра М-последовательности служат импульсы Ui (рис. 8.20, б) с периодом следо
(рис. 8.20, а), а импульсами запуска генерато ра М-последовательности служат импульсы Ui (рис. 8.20, б) с периодом следо
вания |
формируемые делителем 1:пМп и используемые од |
||
новременно |
для управления кодирующим устройством. Период следования |
||
ТГти генератора тактовых импульсов равен |
Делитель 1:пМп связан с |
||
делителем |
1:2, который вырабатывает импульсы |
с |
периодом следования |
и определяет длительность символов двоичного |
кода в напряжении иш· |
||
кодирующим устройством в ФРМ напряжение иш преобразуется так, что единичный разряд иш отображается двумя положительными импульсами, каж дый из которых имеет амплитуду UG и длительность  (рис. 8.20, д). В то же время нулевому значению разряда в сигнале иш кодирующее устройство приводит в соответствие один положительный и один отрицательный видео импульсы, также показанные на рис. 8.20, д.
(рис. 8.20, д). В то же время нулевому значению разряда в сигнале иш кодирующее устройство приводит в соответствие один положительный и один отрицательный видео импульсы, также показанные на рис. 8.20, д.
С кодирующего устройства импульсы ику подаются на балансный модуля тор, где М-последовательность имп (рис. 8.20, ё) умножается на напряжение иКу. В результате образуются импульсы иБм, которые при пПм=7 и N=3 имеют вид, представленный на рис. 8.20, ж. Из рис. 8.20, ж видно, что положитель ные импульсы иКу не изменяют параметры М-последовательности, а когда ику<0, полярность импульсов имп меняется на противоположную.
В устройстве ФКМ осуществляется фазовая манипуляция гармонического напряжения с несущей частотой и таким образом получается ФКМ-сигнал ивых, который подается на усилитель радиопередатчика, связанный с его антенной.
Структурная схема дешифратора КРУ с ФКМ-сигналом показана на рис. 8.21, а иллюстрирующие ее функционирование диаграммы напряжений — на рис. 8.22 [29]. На вход дешифратора подается напряжение иУпч с усилителя промежуточной частоты радиоприемника. Линии задержки Л31 и Л32 вместе с весовыми сумматорами 7 и 2 (ВС1 и ВС2) образуют два фильтра, каждый из которых согласован с пачкой импульсов, характеризующих М-последова тельность, и осуществляет ее сжатие. Коэффициенты передачи ВС1 для любого из N отводов Л31 (парциальные коэффициенты передачи) подбираются так, чтобы осуществлять сжатие М-последовательности. При этом парциальные ко эффициенты передачи ВС1 для отводов 1,2,...,N выбираются равными +КП и -кп, если необходимо усиливать импульсы с начальными фазами, равными ну лю и 180° соответственно. Тогда в зависимости от амплитуды импульсов, по ступающих с шифратора КРУ с КИМ (рис. 8.19), начальная фаза сжатого

импульса может быть равной нулю или π. Если используются трехзначный двоичный код с периодом пМп=7 и напряжение иш (рис. 8.20, г), которое ото бражает двоичное число 101, то образующееся на выходе ВС1 напряжение uBci без учета боковых лепестков имеет вид, представленный на рис. 8.22, а. Здесь символами 0 и π обозначены начальные фазы сжатых импульсов.
Рис. 8.21
Рис. 8.22
Линия задержки Л32 и весовой сумматор ВС2, имеющие такие же пара метры, как и Л31 и ВС1, формируют импульсы иВс2 (рис. 8.22, б), которые представляют собой сдвинутые на время ТМп импульсы uBci· Фазовый детектор (ФД) вырабатывает видеоимпульсы иФД (рис. 8.22, в), под действием которых декодирующее устройство формирует сигналы иду (рис. 8.22, г), повторяющие по структуре напряжение иш(рис. 8.20, г).