

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfединую многопозиционную радиолокационную систему [43]. Отличительной особенностью этих систем являются более высокие информационные возмож ности [8] и повышенная живучесть [11].
Многопозиционные системы воздушно-наземного и воздушного базирова ния [26] состоят из многопозиционной системы информационного обеспечения, центра сбора, обработки информации и управления и системы многоканального наведения средств поражения. Многопозщионные системы наведения обладают существенными преимуществами по отношению как к однопозиционным сис темам наведения, так и к их совокупности, не объединенной в единую систему. Эти преимущества обусловлены прежде всего возможностью использования дополнительной информации, заключенной в пространственной структуре электромагнитного поля. Применение многопозиционных систем наведения позволяет в комплексе решить ряд проблем повышения живучести, помехоза щищенности и точности наведения, маневрирования информационными ресур сами и средствами поражения. Однако имея большие преимущества, МПСН требуют существенного усложнения алгоритмов обработки информации и управления [40], обусловленного появлением в системе наведения еще одного, более высокого иерархического уровня. Среди задач, решаемых на этом уров не, ключевыми являются алгоритмы целенаправленного управления простран ственным положением отдельных позиций, управления информационными по токами между ними, целераспределения и выбора средств поражения.
Следует иметь в виду, что целенаправленное управление местоположени ем позиций дает возможность не только решать задачи перехвата воздушных и уничтожения наземных целей, но и обеспечивать при этом наилучшие условия для осуществления радиолокационных измерений, реализуя концепцию траекторного управления наблюдением [20].
Необходимость рассмотрения вопросов, относящихся к траекторному управлению наблюдением с использованием АК РЛДН, объясняется тем, что в этих системах общая задача уничтожения целей и задача информационного обеспечения этого процесса могут решаться различными позициями. В связи с этим летательные аппараты, непосредственно осуществляющие атаку цели, часто называют ударными (ударными позициями), а летательные аппараты, используемые для улучшения условий радиолокационного наблюдения, — пози циями информационного обеспечения (информационной поддержки).
Отличительной особенностью многопозиционных систем по сравнению с однопозиционными системами является невозможность получения оценок ко ординат и параметров движения цели, необходимых для организации наведе ния ударных ЛА, по информации о цели, получаемой только на одной измери тельной позиции.
Наиболее простыми из многопозиционных систем оказываются двухпозиционные системы. К ним относятся системы, основанные на угломерных
(триангуляционных) методах определения местоположения целей из двух то чек пространства [21], а также системы, использующие полу активное синтези рование апертуры на ударном ЛА и активное синтезирование на ЛА информа ционного обеспечения.
В общем случае объединение информации для решения задач управления позициями может осуществляться различными способами: на уровне первичной обработки в процессе обмена высокочастотными сигналами, когда вся МПСН рассматривается как единая разреженная антенная решетка; на уровне вторичной обработки, когда позиции обмениваются оценками фазовых координат, сформи рованных на отдельных позициях; и на уровне третичной обработки, когда ин формация используется для решения задач целераспределения и выбора оружия.
Управление информационными потоками подразумевает распределение позиций на ударные и информационной поддержки с соответствующим изме нением алгоритмов траекторного управления ими и их информационного обес печения. Весьма важной процедурой управления информационными потоками является выбор режимов излучения и приема, позволяющий в зависимости от обстановки использовать активные, полуактивные и пассивные режимы работы радиолокационных систем с соответствующей синхронизацией аппаратуры на отдельных позициях при выборе состава и алгоритмов функционирования из мерителей.
Задача целераспределения сводится к ранжированию целей по степени опасности и благоприятствования для атаки по различным критериям и рас пределения этих целей по отдельным группам позиций с дальнейшим разделе нием их на ударные и информационной поддержки при выборе вида средств поражения, наилучшим образом отвечающих решаемой задаче и методам их наведения.
В общем случае число позиций в составе МПСН может быть различным, однако все основные ее качественные признаки и свойства реализуются уже в двухпозиционной системе наведения (ДПСН).
Двухпозиционные радиолокационные системы наведения, представляющие собой элементарную ячейку МПСН, являются наиболее простым ее вариантом, на котором удобно рассмотреть все особенности построения и основные этапы функционирования. Следует подчеркнуть, что особенно ярко специфика ДПСН проявляется при функционировании их радиолокационных систем в пассивном режиме. В связи с этим в дальнейшем основное внимание будет уделено двухпозиционным пассивным системам наведения.
Повышение скрытности функционирования является одной из основных тенденций развития радиолокационных систем наведения. Кардинальным спо собом решения проблемы повышения скрытности является использование пассивных режимов работы, область применения которых ограничена радиоизлучающими целями. Однако в пассивном режиме на самолете можно изме рять только бортовые пеленги целей, собственный курс и собственные коорди-
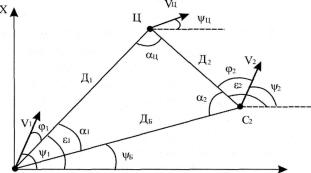
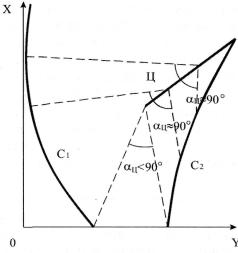
На этом рисунке  - векторы скоростей первой и второй пози ций, а также цели; ψι, ψ2 и ψ4 - углы рыскания (курс) самолетов d, С2 и цели; ει и 82 - углы визирования цели в выбранной системе координат; - бор товые пеленги цели с позиций
- векторы скоростей первой и второй пози ций, а также цели; ψι, ψ2 и ψ4 - углы рыскания (курс) самолетов d, С2 и цели; ει и 82 - углы визирования цели в выбранной системе координат; - бор товые пеленги цели с позиций  - углы триангуляционного треугольника d С2 Ц; Д1 и Д2 - расстояния до цели от позиций Ci и С2, ДБ - расстояние между позициями, называемое базой; ψΒ - угол наклона базы.
- углы триангуляционного треугольника d С2 Ц; Д1 и Д2 - расстояния до цели от позиций Ci и С2, ДБ - расстояние между позициями, называемое базой; ψΒ - угол наклона базы.
Необходимо подчеркнуть что при одинаковой точности измерения борто вых пеленгов точность определения местоположения излучающей воздушной цели определяется среднеквадратической ошибкой (СКО) [22]:
(8.36)
где σφ - СКО измерения пеленгов цели с позиций С ι и С2.
Анализ (8.36) показывает, что точность определения местоположения из лучающего объекта зависит не только от ошибок пеленгации, характеризуемых значением σφ, но и от условий применения, определяемых взаимным располо жением позиций и целей.
В общем случае задача формирования управления обеими позициями, од новременно обеспечивающего и повышение точности определения местополо жения радиоизлучающей цели, и ее уничтожение, является достаточно слож ной. Обусловлено это рядом причин.
Во-первых, для повышения точности оценивания местоположения радио излучающей цели необходимо, чтобы пеленгаторы двигались по отношению к ней под некоторыми, достаточно большими углами φι и φ2, поскольку при ма лых углах возрастают относительные ошибки пеленгации: Αφι/φι и Δφ2/φ2 · В
то же время для поражения цели линия пути самолетов должна проходить че рез цель или упрежденную точку встречи с ней.
Во-вторых, задача одновременного управления двумя позициями стано вится многокритериальной, что предопределяет усложнение процедуры синте за оптимального управления.
Оптимизация управления пассивной угломерной ДПСН существенно уп рощается, если функции перехвата излучающей цели и обеспечения макси мальной точности определения ее местоположения разделить между носителя ми Ci и С2 [31]. При таком подходе одна из позиций, например наиболее близ кая к цели, решает задачу наведения, используя тот или иной метод, а вторая - целенаправленно изменяет свое положение в пространстве, обеспечивая на обеих позициях максимально высокую точность определения местоположения перехватываемого объекта.
Такой подход дает возможность использовать для синтеза хорошо отрабо танные алгоритмы статистической теории оптимального управления [32].
Ниже на основе этой теории приводятся результаты синтеза управления одной из позиций пассивной ДПСН, обеспечивающего максимально высокую точность оценивания местоположения радиоизлучающей цели, при условии, что другая позиция наводится на нее одним из известных способов.
Задача синтеза решается при условии, что выполняются следующие до пущения:
1) двухпозиционная система образована АК РЛДН (первая позиция) и на водимым на источник радиоизлучения самолетом (вторая позиция);
2) на цель наводится вторая, наиболее близкая к ней, позиция, а АК РЛДН управляется лишь для повышения точности определения ее местоположения (рис. 8.5);
3)на каждой позиции измеряются собственный курс (ψι, ψ2), бортовые пе
ленги (φι,φ2), счисляются собственные координаты  и скорости их изменения
и скорости их изменения 
4)на каждой позиции одним из известных способов [21] оцениваются
дальности |
Д],Д2 |
до цели и скорости их изменения |
Д,!,Д2 ', |
5)в течение времени формирования оценок дальностей и скоростей цель не изменяет скорости и направления полета;
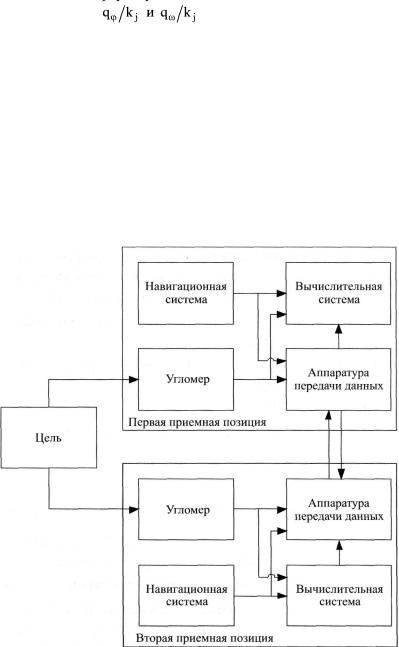
6)на каждом борту имеется система обмена данными, через которую все измеряемые и оцениваемые фазовые координаты передаются на другую по зицию.
Последняя особенность дает возможность вычислять на каждой позиции базу ДБ и угол ее наклона ψΒ (рис. 8.16).
Кроме того, предполагается, что алгоритмы управления позициями в вер тикальной и горизонтальной плоскостях не влияют друг на друга. В связи с этим в дальнейшем будут рассмотрены алгоритмы управления только в гори зонтальной плоскости в предположении, что цель и оба пеленгатора находятся на одной высоте.
Необходимо подчеркнуть, что синтезируемый закон, будучи достаточно простым и реализуемым на практике, должен обладать свойством инвариант ности к закону, используемому для наведения на цель, и к взаимному ее распо ложению относительно пеленгаторов. Анализ формулы (8.36) показывает, что для снижения ошибок оценивания местоположения цели необходимо в первую очередь выдерживать угол  (рис. 8.16). В связи с этим в процессе управления позицией С\, обеспечивающего повышение точности процедур оценивания, независимо от используемого в позиции С2 метода наведения должно выполнятся условие
(рис. 8.16). В связи с этим в процессе управления позицией С\, обеспечивающего повышение точности процедур оценивания, независимо от используемого в позиции С2 метода наведения должно выполнятся условие
 (8.37) которое в дальнейшем и будет положено в основу синтеза желаемого управления.
(8.37) которое в дальнейшем и будет положено в основу синтеза желаемого управления.
Выполнение условия (8.37) требует от самолета С ι движения по прямой, перпендикулярной линии визирования С2Ц. Поэтому метод наведения самолета информационного обеспечения условно может быть назван методом ортого нального наведения.
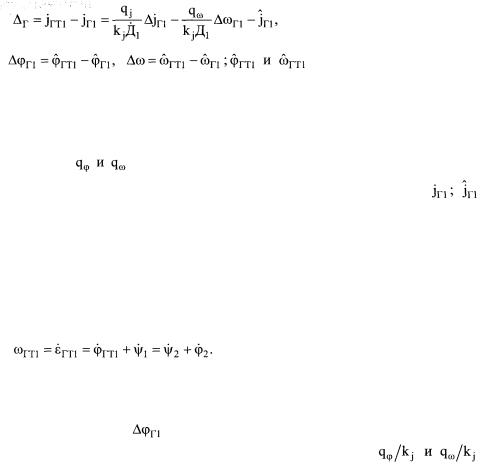
При использовании процедуры формирования сигнала управления j n , оп тимального по минимуму локального функционала качества в [31] получен ал горитм траекторного управления самолетом Cj, определяемый несоответствием требуемого j r T 1 и фактического j r i ускорений, в виде
|
(8.38) |
где |
- оценки требуемых значе |
ний бортового пеленга и угловой скорости линии визирования;  оценки фактических значений угла и угловой скорости линии визирования CiU,;
оценки фактических значений угла и угловой скорости линии визирования CiU,;  - скорость изменения дальности Д{;
- скорость изменения дальности Д{;  - поперечное ускорение са молета Ci в горизонтальной плоскости, рассматриваемое в качестве управляю
- поперечное ускорение са молета Ci в горизонтальной плоскости, рассматриваемое в качестве управляю
щего сигнала; |
- коэффициенты штрафа за ошибки управления по |
φΓ1 |
и ωπ ; к: - коэффициент штрафа за величину сигнала управления |
- |
|
оценка собственного поперечного ускорения.
Воспользовавшись соотношением (8.36) и геометрией взаимного распо ложения самолетов и цели, показанной на рис. 8.16, уточним значения φΓΤ1 и ωΓΤ1. Из рисунка следует, что
 (8.39) В свою очередь
(8.39) В свою очередь
(8.40)
Анализ соотношений (8.38)-(8.40) позволяет прийти к следующим заклю чениям.
Управляющее поперечное ускорение самолета С! определяется ошибками
по угловой координате |
и ошибками по угловой скорости ΔωΓ1. |
|
Вес этих ошибок обусловлен соотношениями штрафов |
и |
|
условиями применения, |
определяемыми значениями ^ VLJ\X. При |
этом на |
больших расстояниях, предопределяющих малые значения угловых скоростей, преобладающее значение имеет управление по угловым ошибкам. В то же вре мя на малых расстояниях при достаточно больших значениях угловых скоро стей основным является управление по угловым скоростям. Расстояние, на
Пример траекторий полета цели Ц, ударного самолета С2, наводимого по методу пропорционального наведения, и самолета информационного обеспече ния Ci показаны на рис. 8.18.
Из рисунка видно, что самолет С ι информационного обеспечения движет ся по такой траектории, что ац —» 90°, обеспечивая тем самым наивысшую
точность определения местоположения ИРИ, соответственно, и наилучшую точность наведения. При этом полученный закон управления, являясь инвари антным к методам наведения ударного самолета и взаимному расположению цели и позиций, не налагает принципиальных ограничений на возможность его реализации ни по составу требуемых измерителей, ни по требованиям к объему памяти и быстродействию вычислителей.
Рис. 8.18
Следует отметить, что возможны и другие варианты алгоритмов траекторного управления. В частности, если комплекс РЛДН размещен на маломанев ренном носителе, не способном удовлетворять условиям формирования (8.38), то возможен вариант перехвата ИРИ, при котором АК РЛДН движется по пря мой линии, а наводимый самолет выполняет функции и информационной, и ударной позиций.
В заключение необходимо подчеркнуть, что сравнение (8.38) с (8.13) и (8.32) позволяет сделать вывод об их качественной идентичности. Эта осо бенность позволяет судить об универсальности метода, пригодного для ис пользования по обширной номенклатуре целей в различных условиях при менения.
8.5. Особенности управления летательными аппаратами при решении различных задач
Основными преимуществами АК РЛДН по сравнению с наземными АСУ боевых действий являются его потенциально высокие характеристики обнару жения малоразмерных и маловысотных воздушных, наземных и морских целей и возможность оперативного создания адаптивно перемещаемых в заданных областях пространства подвижных полей информации и управления [34]. В ре зультате АК РЛДН имеет определенные преимущества перед наземными ко мандными пунктами (пунктами управления) по обеспечиваемым рубежам вво да в бой самолетов, особенно на предельно малых высотах.
К важнейшим задачам АК РЛДН относятся задачи информационного обеспечения боевых действий и управления ЛА, среди которых прежде всего нужно выделить задачи, условно объединенные в группы работы по воздуш ным целям, наземным объектам и с сопрягаемыми летательными аппаратами. Принципы взаимодействия АК РЛДН с наводимыми Л А при решении задач «в-в» и «в-п» были рассмотрены в предыдущих главах. Под сопрягаемыми ЛА понимают истребители прикрытия, ведомые АК РЛДН, самолеты-заправщики, ретрансляторы воздушного базирования и т. д.
Увеличенный объем решаемых задач, возросшие возможности информа ционных и бортовых вычислительных систем предопределяют некоторые осо бенности боевой работы АК РЛДН нового поколения, часть из которых кратко будут рассмотрены ниже.
Боевая работа АК РЛДН начинается с момента загрузки на аэродроме в базу данных полетного задания и карты местности (карты ТВД). В полетном задании содержатся маршрут полета носителя и вся оперативно-тактическая обстановка в зоне его действия. Оперативно-тактическая информация посту пает на рабочее место командира расчета, который при с помощи системы интеллектуальной поддержки принятия решений осуществляет непрерывный мониторинг оперативно-тактической обстановки и управляет действиями АК РЛДН. Оперативно-тактическая обстановка непрерывно поддерживается и обновляется в базе данных БВС на основе информации от внешних и внут ренних датчиков [2].
Необходимо подчеркнуть, что многократно возросший объем априорной информации, загружаемой в базу данных, и возросшая сложность принятия решения лицами боевого расчета предопределяют необходимость использова ния эффективной системы интеллектуальной поддержки принятия решения.
Управление группами истребителей-перехватчиков, как и ранее, осущест вляется либо способом командного наведения, либо способом полуавтономных действий. При командном наведении на борт командира группы истребителей