

2 Управляемость автомобиля и безопасность движения
2.1 Значение управляемости автомобиля для безопасного движения
Управляемость оценивают по соответствию параметров движения автомобиля воздействием водителя на рулевое управление. При различных воздействиях степень соответствия может быть различной, что затрудняет выбор единого критерия для комплексной оценки управляемости автомобиля в эксплуатационных условиях.
Поворачивая рулевое колесо, водитель задает новое направление движения автомобиля. При плохой управляемости автомобиля действительное направление движения не совпадает с желательным и необходимы дополнительные управляющие воздействия со стороны водителя. Это приводит к «рысканию» автомобиля по дороге, увеличению динамического коридора и утомлению водителя. При особенно неблагоприятных условиях плохая управляемость может явиться причиной столкновения автомобилей, наезда на пешехода или выезда за пределы дороги.
Подавляющее большинство опасных дорожных ситуаций (до 80...85%) водитель ликвидирует путем своевременного поворота рулевого колеса и изменения направления движения автомобиля. При этом водитель может, либо повернув автомобиль, отвести его от опасной зоны под углом к прежнему направлению движения, либо выехать в соседний ряд. Первый маневр проще, но его выполнению может помешать недостаточная ширина проезжей части, деревья, столбы и другие препятствия, находящиеся за пределами дороги. Второй маневр можно выполнить на любой двухполосной дороге.
Определим параметры движения автомобиля при первом маневре, считая шины жесткими в боковом направлении. Это позволит ограничиться простыми кинематическими зависимостями.
В положении Ι (рисунок 2.1) водитель замечает впереди на расстоянииS2препятствие. На путиSp(за времяtp) он осознает необходимость маневра и принимает решение о его выполнении. На путиSр.у(за времяtр.у) водитель поворачивает рулевое колесо, но автомобиль продолжает двигаться прямолинейно, так как происходит деформация амортизационных пружин, рычагов и тяг рулевого управления и положение передних колес не меняется (положениеII). Времяtp.y– время запаздывания рулевого управления – составляет в среднем 0,15…0,35 с. В положенииIII автомобиль начинает двигаться криволинейно. При этом водитель поворачивает колеса вначале в одну сторону, и угол θ увеличивается (времяТ1). В опасных ситуациях после поворота колес на угол θ1водитель сразу поворачивает их обратно, вследствие чего угол θ уменьшается (времяТ2). В положенииIVθ=0, и автомобиль движется прямолинейно под углом γмк прежнему направлению движения. Безопасность поворота будет обеспечена, если в конце маневра между автомобилем и препятствием останется некоторый интервал Δ. Согласно рисунку 2.1,аможно написать:
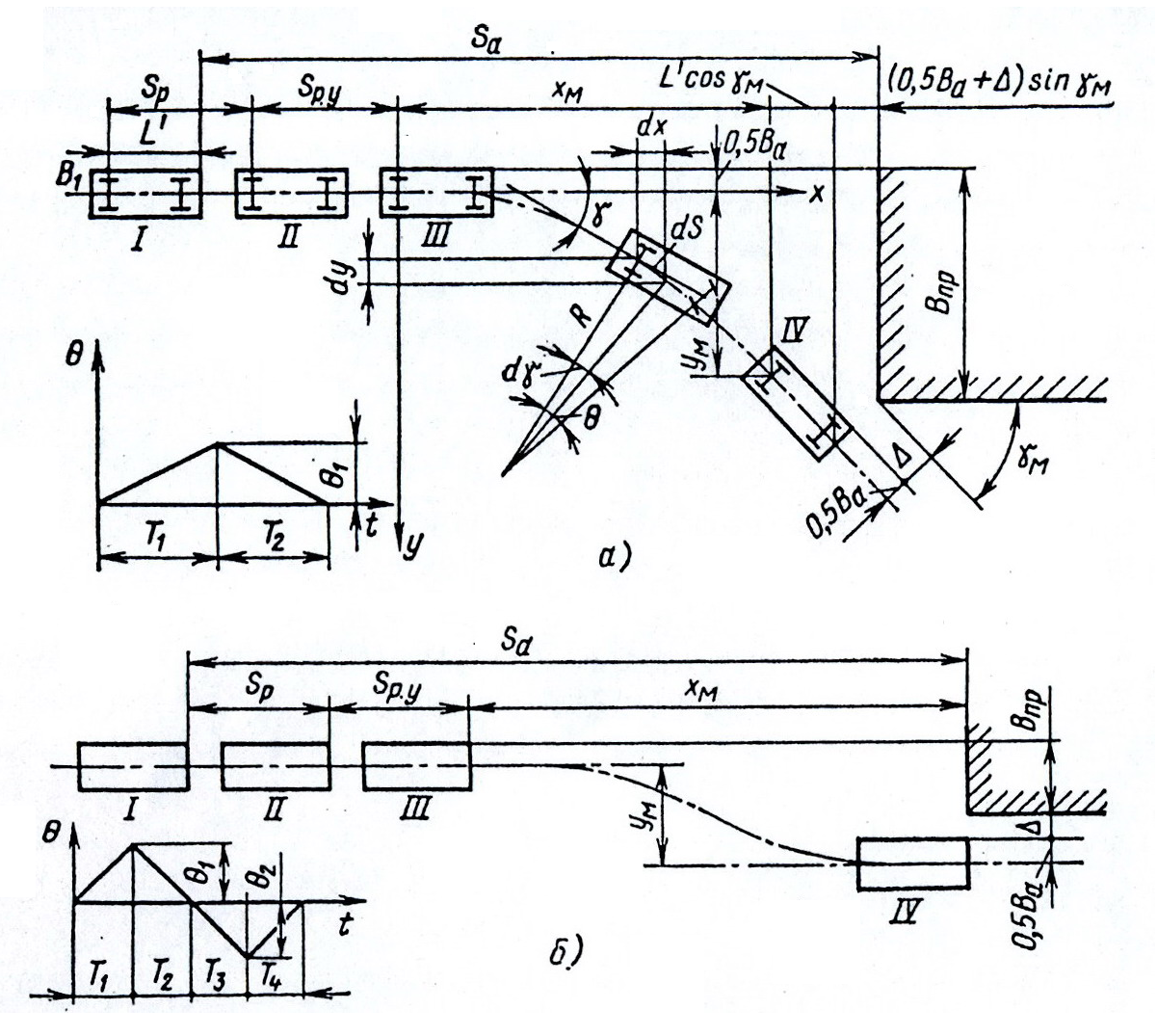
Рисунок 2.1 Схемы для расчета маневра автомобиля:
а –при неограниченной ширине препятствий;б – при смене полосы движения
Sa=Sp–L' +Sp.у+xм+L'×cosγм+ (0,5×Ba+Δ)×sinγм;
yм+ 0,5×Ba+L'×sinγм=Bпp+ (0,5×Ba+Δ)×cosγм,
где L'– расстояние от заднего моста до передней части автомобиля;
xмиyм– продольное и поперечное перемещения автомобиля в процессе маневра;
Bпр –ширина препятствия.
Приняв приближенно sinγм≈γмиcosγм= 1. получим условия безопасного маневра:
xм≤Sa–Sp–Sp.y+ (0,5×Ba+Δ)γм;
yм ≥ Впр+Δ –L×γм.
Чтобы определить параметры криволинейного движения, проведем оси координат хиутак, чтобы начало системы координат совпадало с серединой заднего моста автомобиля в положенииIII. В некоторый момент времениtавтомобиль, двигаясь криволинейно, повернется относительно осихна уголγ. После поворота его еще на бесконечно малый уголdγсередина заднего моста опишет дугуdS=R×dγ. При движении автомобиля с постоянной скоростьюvдлина дугиdS=v×dt. Учитывая равенство (1.4), имеем:
dγ = dS/R – v×dt/R = v×θ×dt/L.
Закон изменения угла γпо времени зависит от водителя и может
быть различным. Примем для простоты,
что угловая скорость поворота передних
колес постоянна (![]() =const)
и в первой фазе поворота (времяТ1)
угол θ изменяется прямо пропорционально
времени:
=const)
и в первой фазе поворота (времяТ1)
угол θ изменяется прямо пропорционально
времени:
θ =![]() ×t.
×t.
При этом допущении курсовой угол прямо пропорционален квадрату времени:
γ= v×![]() ×∫
t×dt/L=
v×
×∫
t×dt/L=
v×![]() ×t2
/(2×L).(2.1)
×t2
/(2×L).(2.1)
В эксплуатационных условиях максимальное значение курсового угла обычно не превышает 10...15°. Для таких значений γизменение координатхиуточкиB1за времяdtопределяется формулами:
dx=dS×cos γ ≈ dx; dy= dS×sin γ ≈dS×γ =v×dt×γ.
Следовательно, координаты точки В1, в момент времениtимеют следующие значения:
x=∫ v×dt = v×t; (2.2)
y=(v2×![]() ×∫
t2×dt)
/(2×L)=
v2×
×∫
t2×dt)
/(2×L)=
v2×![]() ×t3/(6×L)
(2.3)
×t3/(6×L)
(2.3)
Формулы (2.1) – (2.3) позволяют найти γ,хиуи определить положение автомобиля на дороге в процессе входа в поворот.
Величина угловой скорости
![]() ограничена, с одной стороны,
психофизиологическими возможностями
водителя и находится в следующих
пределах, рад/с:
ограничена, с одной стороны,
психофизиологическими возможностями
водителя и находится в следующих
пределах, рад/с:
Для легковых автомобилей............................................................0,2 – 0,3
Для грузовых автомобилей и автобусов.....................................0,15 – 0,3
С другой стороны, скорость
![]() не может быть особенно большой по
соображениям безопасности. Выполняя
маневр, водитель должен избегать заноса
или опрокидывания.
не может быть особенно большой по
соображениям безопасности. Выполняя
маневр, водитель должен избегать заноса
или опрокидывания.
Потеря устойчивости автомобилем наиболее вероятна в середине маневра (при θ = θ1), где кривизна траектории максимальна. Из условия равенства центробежной силы и силы сцепления на этом участке имеем
M×v2/R=
M×v2/L×θ1=G×v2/g×L×![]() ×T1=G×φy.
(2.4)
×T1=G×φy.
(2.4)
Отсюда максимально допустимая угловая скорость поворота передних колес по условиям сцепления:
![]() =
L×G×φy
/(v2×T1).
=
L×G×φy
/(v2×T1).
Подставив значение
![]() в формулы (2.1) и (2.2), получим выражения
для определения параметров γ1,х1иу1в середине маневра (таблица
2.1). Проведя аналогичные вычисления для
второй фазы маневра – выхода автомобиля
из поворота, получим формулы для
параметровγм,хмиумконца второй фазы – выхода
автомобиля из поворота.
в формулы (2.1) и (2.2), получим выражения
для определения параметров γ1,х1иу1в середине маневра (таблица
2.1). Проведя аналогичные вычисления для
второй фазы маневра – выхода автомобиля
из поворота, получим формулы для
параметровγм,хмиумконца второй фазы – выхода
автомобиля из поворота.
Таблица 2.1
Параметры движения автомобиля при маневрах
|
Маневр |
γ |
x |
y |
|
Вход в поворот |
γ1=g×φy×T1/(2×v) |
x1=v×T1 |
y1=
g×φy×T |
|
Выход из поворота |
γ2=g×φy×T1/v=2×γ1 |
x2=2×v×T1=2×x1 |
y2=g×φy×
T |
|
Смена полосы движения |
γм=0 |
xм=4×v×T1 |
yм=2×
g×φy×
T =g×φy×x |
Выполняя маневр второго типа – смену полосы движения, водитель должен повернуть рулевое колесо несколько раз (рисунок 2.1, б), Сначала он поворачивает его на угол θ1в одну сторону, затем на угол, равный 2×θ1в другую сторону и, наконец, возвращает колеса в нейтральное положение. Весь маневр, состоящий в этом случае из четырех периодовТ1–Т4, требует от водителя точного расчета и большего числа действий на том же пути, чем при маневре первого типа. Зато при выполнении маневра второго типа автомобиль меньше смещается в поперечном направлении, и проезжая часть дороги может быть значительно уже. В конце маневра курсовой угол равен нулю и автомобиль движется параллельно прежнему направлению движения.
Формулы для расчета параметров маневра второго типа также даны в таблицу 2.1.
Изложенный выше анализ маневра проведен для элементарной расчетной схемы, в которой не учитываются многие конструктивные и эксплуатационные факторы. Параметры движения реального автомобиля могут значительно отличаться от расчетных данных, поэтому последние обычно используют лишь для сравнения различных вариантов маневра.
2.2 Поворачиваемость автомобиля
Поворачиваемостью называют свойство автомобиля изменять направление движения без поворота управляемых колес. Есть две основных причины поворачиваемости: увод колес, вызываемый поперечной эластичностью шин, и поперечный крен кузова, связанный с эластичностью подвески. Соответственно различают шинную и креновую поворачиваемость автомобиля.
Уводом называют качение колеса под углом к своей плоскости. При действии на колесо с эластичной шиной поперечной силы Рувектор скорости центра колеса отклоняется от плоскости вращения на некоторый угол δ – угол увода. СилаРуи угол увода δ связаны следующей зависимостью:
Pу=kу×δ, (2.5)
где kу –коэффициент сопротивления уводу (первая производная от поперечной силы по углу увода), Н/рад.
Величина kузависит от многих факторов, из которых наибольшее значение имеют величина угла увода, вертикальная и касательная силы, приложенные к колесу, и наклон колеса к вертикали. Считая, что эти факторы действуют независимо один от другого, их влияние наkуучитывают экспериментальными поправочными коэффициентами. С учетом этих коэффициентов формула (2.5) принимает следующий вид:
Ру=q1×q2×q3×q4× kу max×δ,
где q1иq2 –коэффициенты, учитывающие изменение вертикальной и касательной сил, действующих на колесо;
q3 –коэффициент, учитывающий изменение угла наклона колеса;
q4 –коэффициент, учитывающий влияние угла δ и характера опорной поверхности;
kу max –максимальный коэффициент сопротивления уводу при изменении вертикальной нагрузки и малых величинах δ.
Экспериментальные зависимости угла δ от Рудля некоторых шин показаны на рисунке 2.2. Эти зависимости имеют сложный характер, однако при малых углах увода их можно приближенно считать линейными, а коэффициентkупостоянным.
При наличии увода центр поворота автомобиля находится не в точке О, как у автомобиля с жесткими шинами (рисунок 2.3, а в точке О1, т. е. в месте пересечения перпендикуляров к векторам скоростейv1иv2.
Для автомобиля с жесткими шинами δ1= δ2= 0 и для радиуса получаем формулу (1.4).
Таким образом, траектория движения автомобиля с жесткими шинами зависит только от угла θ. У автомобиля cэластичными шинами на нее влияют углы увода, которые в свою очередь зависят от θ,vи других факторов. При наличии увода автомобиль может двигаться криволинейно, даже при θ = 0. Кривизна траектории зависит от соотношения углов δ1и δ2. Если δ1= δ2, то шинную поворачиваемость автомобиля называют нейтральной.

Рисунок 2.2 Зависимости угла увода δ от поперечной силыРудля автомобилей с различными шинами

Рисунок 2.3 Схема движения автомобиля с эластичными шинами
Хотя при этом согласно формуле (1.4) Rэ=R, но траектория движения автомобиляcжесткими шинами не совпадает с траекторией движения автомобиля, имеющего нейтральную поворачиваемость, так как центры поворота в этих случаях занимают различные положения.
В случае действия поперечной силы на автомобиль, имеющий жесткие шины, он сохраняет прежнее направление движения, пока эта сила по величине не станет равной силе сцепления. Автомобиль, имеющий нейтральную шинную поворачиваемость, под действием поперечной силы движется под углом δук прежнему направлению движения.
Если δ1> δ2, тоRэ>R, и для движения автомобиля с эластичными шинами по кривой радиусомRэуправляемые колеса нужно повернуть на больший угол, чем при жестких шинах. В этом случае шинную поворачиваемость автомобиля называют недостаточной. Под действием поперечной силыРу(рисунок 2.4,а) при прямолинейном движении передняя ось автомобиля с недостаточной поворачиваемостью в результате увода, движется под углом δ1к прежнему направлению движения, а задний мост – под углом δ2. Автомобиль поворачивается вокруг центра О1, вследствие чего возникает центробежная силаРц, поперечная составляющаяРцукоторой направлена в сторону, противоположную силеРу, что уменьшает результирующую поперечную силу и увод колес. Следовательно, автомобиль с недостаточной шинной поворачиваемостью устойчиво сохраняет прямолинейное направление движения.
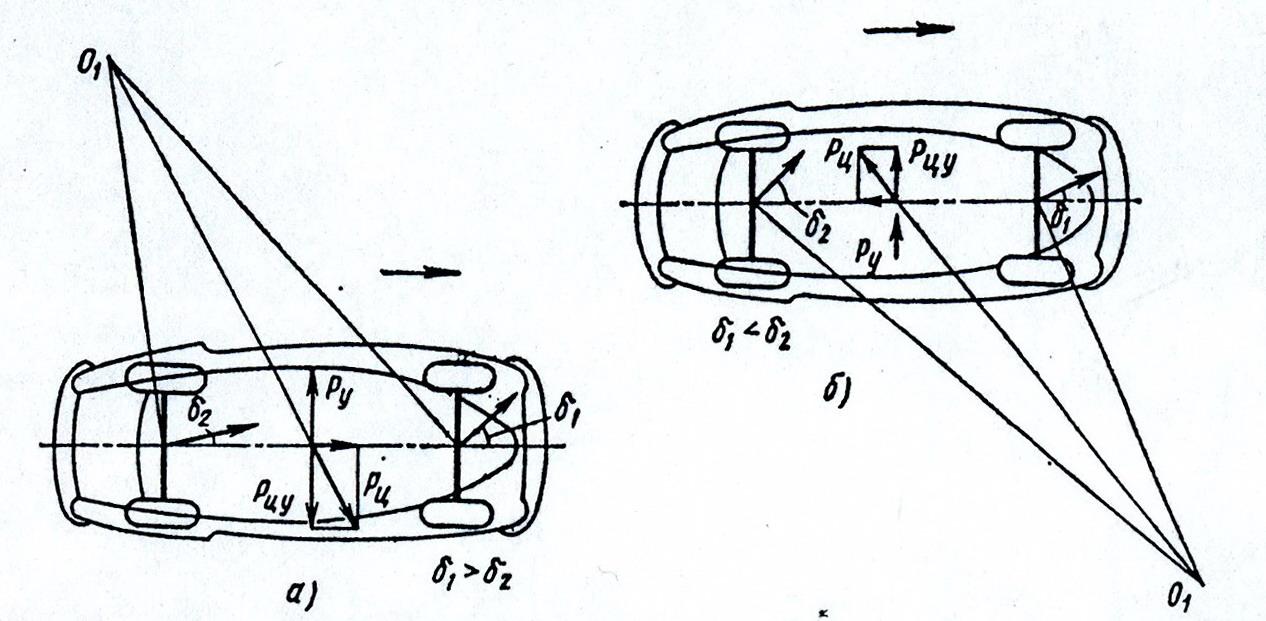
Рисунок 2.4 Схемы движения автомобиля с различной шинной поворачиваемостью:
а – с недостаточной;б– с излишней
Если угол δ1<δ3, тоRэ<R, и для движения автомобиля с эластичными шинами по кривой радиусомRуправляемые колеса нужно повернуть на меньший угол, чем при жестких шинах. В этом случае шинную поворачиваемость автомобиля называют излишней. Если на автомобиль с излишней поворачиваемостью действует центробежная силаРц, то он тоже движется криволинейно (рисунок 2.4,б). Однако составляющаяPцув этом случае направлена в ту же сторону, что и силаРу. В результате увод возрастает, что увеличивает кривизну траектории и силуPцуи т. д. Если водитель не повернет управляемые колеса в нужном направлении, то центробежная силаРцможет возрасти настолько, что автомобиль потеряет устойчивость. Таким образом, автомобиль с недостаточной поворачиваемостью более устойчив и лучше сохраняет направление движения, чем автомобиль с излишней поворачиваемостью.
Для количественной оценки шинной поворачиваемости автомобиля служит коэффициент поворачиваемости:
ηпов=(G2/kу2)/(G1/kу1)=G2×kу1/ (G1×kу2),
где kу1иkу2– коэффициенты сопротивления уводу переднего и заднего мостов автомобиля.
При излишней шинной поворачиваемости автомобиля ηпов>1,при нейтральной ηпов= 1, а при недостаточной ηпов< 1. Значения ηповдля некоторых отечественных автомобилей приведены в таблице 2.2, свидетельствующей о том, что большинство автомобилей имеют недостаточную шинную поворачиваемость в ненагруженном состоянии. При полной нагрузке, напротив, автомобили имеют излишнюю поворачиваемость. Показатель ηповявляется приближенным, так как в процессе движения автомобиля коэффициентkуменяется в широких пределах.
Таблица 2.2
Коэффициенты шинной поворачиваемости
|
Автомобиль |
без нагрузки |
с полной нагрузкой |
Автомобиль |
без нагрузки |
с полной нагрузкой |
|
ЗАЗ-969 «Запорожец» |
1,36 |
1,15 |
ГАЗ-14 «Чайка» |
0,85 |
1,08 |
|
ЗИЛ-118 |
0,96 |
1,10 | |||
|
ВАЗ-2109 «Жигули» |
0,84 |
1,10 |
УАЗ-452 |
0,78 |
1,38 |
|
ГАЗ-4509 |
0.61 |
1,26 | |||
|
«Москвич-2140» |
0,87 |
1,17 |
ЗИЛ-4331 |
0,51 |
1,35 |
|
ГАЗ-31105 |
0,89 |
1,10 |
МАЗ-5336 |
0,43 |
1,04 |
Креновая поворачиваемость автомобиля связана с конструкцией его подвески. На рисунке 2.5 показан задний мост с рессорной подвеской автомобиля, который совершает правый поворот. Передние концы рессор соединены с кузовом простым шарниром, а задние – с помощью серьги. При прогибах рессоры задний мост перемещается по дуге mm, причем ось его качания расположена около шарнира. Под действием поперечной силыРкукузов автомобиля наклоняется, вызывая сжатие левых рессор и распрямление правых. Левая рессора, сжимаясь, перемещает задний мост назад (в точкуА), а правая, распрямляясь, перемещает его вперед (в точкуВ). В результате задний мост поворачивается в горизонтальной плоскости, как показано штриховой линией.
Если углы поворота переднего и заднего мостов не одинаковы по величине или направлению, то автомобиль вследствие крена поворачивается, хотя передние колеса остаются в нейтральном положении. Так, при действии одной и той же возмущающей силы РуавтомобильА(рисунок 2.6) повернется вправо, а автомобильБ– влево.

Рисунок 2.5 Поворот заднего моста при крене кузова
Возникающая при повороте центробежная сила Рцу автомобиляАнаправлена в противоположную сторону по сравнению с возмущающей силойРу, а у автомобиляБв ту же сторону. Поэтому автомобильАлучше сохраняет направление движения под действием поперечных возмущающих сил.

Рисунок 2.6 Схемы движения автомобилей с зависимой рессорой подвеской, имеющих различную креновую поворачиваемость
По аналогии с шинной поворачиваемостью можно сказать, что автомобиль Аимеет недостаточную, а автомобильБизлишнюю креновую поворачиваемость.
У автомобиля с излишней креновой поворачиваемостью, на который действует поперечная сила, кривизна траектории непрерывно увеличивается. Это приводит к росту центробежной силы и дальнейшему уменьшению радиуса поворота. Однако максимальное значение угла поперечного крена обычно ограничено упорами, предусмотренными в конструкции подвески. Поэтому креновая поворачиваемость не может увеличиваться беспредельно.
Креновая поворачиваемость автомобиля тесно связана с шинной поворачиваемостью, так как увод колеса возникает не только под действием сил и моментов, но и при наклоне колеса к вертикали (развале). Если направление поперечной силы совпадает с направлением развала колеса, то увод возрастает. Развал колеса, равный 1°, вызывает увод на угол 10...20'. У автомобилей с независимой подвеской колес на поперечных рычагах крен кузова вызывает изменение развала колеса. При двухрычажной подвеске (рисунок 2.7) колеса наклоняются в сторону крена кузова в направлении действия поперечной силы Ру, что увеличивает угол увода моста. При однорычажной подвеске (рисунок 2.7,б) колеса наклоняются в сторону, противоположную крену кузова, навстречу поперечной силе. В этом случае угол увода моста уменьшается. Таким образом, в зависимости от конструкции подвески, креновая поворачиваемость может либо усиливать, либо ослаблять влияние шинной поворачиваемости.

Рисунок 2.7 Схемы движения автомобилей с независимой рычажной подвеской, имеющих различную креновую поворачиваемость
Для обеспечения недостаточной поворачиваемости автомобиля необходимо, чтобы угол увода переднего моста был больше угла увода заднего моста. Поэтому у легковых автомобилей наиболее распространена передняя независимая подвеска на двух рычагах. Заднюю подвеску выполняют зависимой или же независимой на одном поперечном рычаге. Никогда не применяют однорычажную подвеску для переднего моста и двухрычажную для заднего, так как это приводит к резкому ухудшению управляемости автомобиля.
Вследствие большого числа факторов, влияющих на управляемость, фактическая траектория автомобиля может существенно отличаться от расчетной. Так, например, при смене полосы движения расстояние хм, необходимое для смещения автомобиля в поперечном направлении на величинуум, больше, чем определенное по формуле, приведенной в таблице 2.1. Расхождение расчетных и экспериментальных значений зависит от скорости автомобиля, сцепления шин с дорогой и других причин. Поскольку расчет траектории с учетом всех факторов трудоемок, то в практике поперечное смещение автомобиля определяют, считая шины жесткими, а расстояниехм уточняют, применяя поправочный коэффициентkм. Этот коэффициент показывает, во сколько раз фактический путь маневрахфбольше расчетного:
kм=хф/хм> 1.
Коэффициент маневра определяют по эмпирическим формулам:
для сухого асфальтобетона……………….......kм=1,12 + 0,005×v
для мокрого…………………………….…..…..kм=1,05 + 0,005×v
для гололеда………………………….……..….kм=1,0 + 0,0033×v
В [15] была получена формула, определяющая максимальную скорость vск1автомобиля без поперечного скольжения передних колес. Эту скорость называют критической по условиям управляемости. Если действительная скорость автомобиля превысит критическую, то, как установлено выше, заноса не произойдет, однако автомобиль частично утратит управляемость. При постоянной скорости водитель поворотом рулевого колеса не сможет уменьшить радиуса кривой. При увеличении скорости автомобиля и неизменном положении передних колес радиус кривой автоматически возрастает вследствие поперечного проскальзывания шин по дороге. Критическая скорость автомобиля по управляемости уменьшается при снижении коэффициента сцепления. Поэтому потеря управляемости наиболее вероятна в случае движения автомобиля по мокрым и скользким покрытиям.
Автомобиль может также утратить управляемость вследствие увода шин. Чтобы объяснить это положение, определим из формулы (1.5) угол поворота управляемых колес (в рад):
θ=(L/Rэ) – (δ2– δ1). (2.7)
Углы увода δ1и δ2пропорциональны поперечным силамРу1иPу2, которые в свою очередь пропорциональны квадрату скорости:
δ1=Ру1/kу1=М1×v2/(Rэ×kу1); (2.8)
δ2=Ру2/kу2=М2×v2/(Rэ×kу2). (2.9)
где kу1иkу2– коэффициенты сопротивления уводу соответственно переднего и заднего мостов, Н/рад;
M1иМ2– массы, отнесенные соответственно к переднему и заднему мостам, кг.
При повышении скорости автомобиля углы увода также возрастают. При этом у автомобиля с излишней шинной поворачиваемостью угол δ2увеличивается быстрее угла δ1. Вследствие этого правая часть выражения (2.7) уменьшается и при некоторой так называемой критической скоростиvувоказывается равной нулю. При этой скорости автомобиль начинает двигаться криволинейно, хотя его управляемые колеса находятся в нейтральном положении. Если скорость автомобиля большеvув, то разность δ2 - δ1>L/Rэ, и угол θ становится отрицательным. Это означает, что для поворота автомобиля вправо передние колеса нужно повернуть влево. Следовательно, автомобиль с излишней шинной поворачиваемостью теряет управляемость, если его скорость больше критическойvув.
Для определения критической скорости, приняв угол θ =0, подставим в формулу (2.7) разность углов δ1и δ2полученную из выражений (2.8) и (2.9), тогда:
δ2– δ1=( М2 / kу2–М1 / kу1)×v2/Rэ= L/Rэ
Следовательно, критическая скорость по условиям увода:
vув=![]() .
(2.10)
.
(2.10)
У автомобиля с недостаточной или нейтральной шинной поворачиваемостью критическая скорость отсутствует, так как при δ1=δ2подкоренное выражение отрицательно и скоростьvув, является мнимой величиной, а при δ1=δ2она равна бесконечности.
Чтобы обеспечить недостаточную шинную поворачиваемость автомобиля, несколько уменьшают давление воздуха в шинах передних колес по сравнению с давлением в шинах задних колес и тем самым снижают коэффициент поворачиваемости (ηпов). Кроме того, центр тяжести автомобиля немного смещают в сторону переднего моста, что увеличивает часть центробежной силы, действующую на управляемые колеса.
2.3 Устойчивость переднего и заднего мостов
При определении максимально допустимой (критической) скорости, с которой можно вести автомобиль без поперечного скольжения vск предполагается [7,8,9,10,15], что продольные силы отсутствуют и оба моста автомобиля скользят в поперечном направлении одновременно. Такое явление в практике наблюдается редко, обычно раньше начинают скользить колеса одного из мостов: заднего или переднего. Для качения колеса без продольного и поперечного проскальзывания необходимы следующие условия:
Fсц=Rz
×φ≥![]() ,
,
где Rx, Ry, Rz,– касательная, поперечная, нормальная реакция дороги на колесо.
Отсюда:
φ≥![]() ,
,
где χ= Rx /Rz – удельная касательная реакция, равная для ведущего колесаFт /Rz, а для тормозногоFтор /Rz; для ведомого колесаχ=f.
Поперечная составляющая центробежной силы Fyопределяет поперечную реакцию дороги на колесо
Fy =M×v2×θ/L= G×v2/(g×R). (2.11)
Подставим вместо поперечной силы её значение по формуле (2.11),тогда:
φ2= χ2 + (G×v2/(g×R×Rz))2.
Не учитывая динамических нагрузок на колеса, можно приближенно принять Rz=G. Следовательно, максимальная скорость, с которой автомобиль может двигаться без скольжения при совместном действии касательных и поперечных сил,
v![]() =
=![]() .
.
Скорость v![]() меньше скоростиvск,
определенной для случая равномерного
движения автомобиля и разгона, примерно
на 10…20%. При интенсивном торможенииχ
≈ φ, при этомv
меньше скоростиvск,
определенной для случая равномерного
движения автомобиля и разгона, примерно
на 10…20%. При интенсивном торможенииχ
≈ φ, при этомv![]() ≈
0, и даже небольшое отклонение может
привести к заносу.
≈
0, и даже небольшое отклонение может
привести к заносу.
Аналогично можно получить формулы, определяющие условия устойчивости переднего и заднего мостов. Соответствующие критические скорости определяют по формулам:
vск1=![]() ;
(2.12)
;
(2.12)
vск2=![]() .
.
где m1 иm2– коэффициенты изменения вертикальных реакций; для двухосных автомобилей при движении под действием силы тягиm1=0.8…0.9;m2=1.05…1.1; при торможенииm1=1.2…1.3 иm2=0.7…0.8.
При активных режимах движения у заднеприводных автомобилей χ1˂χ2. При торможении колеса заднего моста разгружаются, а переднего нагружаются иm1> m2.Поэтому в обоих случаяхvск1> vск2 , т.е. наиболее вероятен занос заднего моста.
На рисунке 2.8, апоказан автомобиль, движущийся криволинейно по дуге радиусаR. Если скорость автомобиляvпревышает критическое значениеvск2, то задний мост будет проскальзывать в поперечном направлении с некоторой скоростьюvу2. В результате сложения скоростей задний мост начнет перемещаться по направлению вектораv3и радиус уменьшается доR1. Уменьшение радиуса вызывает увеличение центробежной силы, что в свою очередь приведет к дальнейшему уменьшению радиуса. При некотором значении радиуса начнут проскальзывать колеса переднего моста. Однако скорость поперечного скольжения заднего моста все время будет расти быстрее, и автомобиль будет двигаться по дуге непрерывно уменьшающегося радиуса. Такое движение автомобиля называется заносом. Занос чрезвычайно опасен, так как развивается обычно быстро и может привести к выходу автомобиля за пределы полосы движения или опрокидыванию.

Рисунок 2.8 Занос переднего и заднего мостов автомобиля
Если vск1<vск2, то приv=vск1начинается поперечное скольжение переднего моста со скоростьюvу1. (рисунок 2.8б). В этом случае передний мост перемещается по направлению вектораv3. и радиус увеличивается отRдоR1. Увеличение радиуса приводит к уменьшению центробежной силы, и скоростьvу1понижается. Следовательно, такой автомобиль не может войти в занос, хотя может частично утратить управляемость.
Чтобы прервать начавшийся занос, нужно прекратить торможение или подачу топлива, уменьшив тем самым величину χ. Кроме того нужно повернуть передние колеса в сторону скольжения заднего моста. Пусть во время начала заноса передние колеса занимали нейтральное положение и центр поворота находился в точкеO(рисунок 2.8в). После поворота колес на угол θ центр поворота сместится в точкуО1и радиус поворота увеличится от отRдоR1, а центробежная сила уменьшится.
2.4 Оценка управляемости автомобиля ГАЗ-31105
Исходными данными для расчета характеристик управляемости являются:
1. Размерные параметры автомобиля ГАЗ-31105 [16]
а) наибольшая ширина ………………Ba=1,846 м;
б) наибольшая высота………………..Ha=1,476 м;
в) база автомобиля……………………L=2,8 м;
г) площадь лобового сопротивления может быть приближенно определена по выражению [7]
Aв=αв×Ha× Ba=0,78×1,476×1,846=2,125 м2;
где αв– коэффициент заполнения площади для легковых автомобилейαв= =0,78…0,8. Принимаемαв= 0,78.
2. Снаряженная и полная масса автомобиля [16].
а) снаряженная масса
m0=1470 кг;
в том числе на переднюю ось m01=780 кг;
в том числе на заднюю ось m02=690 кг;
б) полная масса
ma=1870 кг;
в том числе на переднюю ось ma1= 890 кг;
в том числе на заднюю ось ma2= 980 кг.
3. Координаты центра тяжести [17]
а) высота центра тяжести
hц=0,595 м;
б) расстояние от центра тяжести:
до передней оси автомобиля
а=( ma2/ ma)×L=980/1870×2,8 = 1,476 м;
до задней оси автомобиля
b=L–a= 2,8 – 1,467 = 1,333 м.
4. Коэффициент полезного действия трансмиссии [7]
ηт= 0,8…0,92;
Принимаем ηт= 0,92.
5. Коэффициент сопротивления воздуха [7]
kв= 0,15…0,35H×c2/м4;
Принимаем kв= 0,2H×c2/м4
6. Статический радиус колеса. Для шин размером 205/70R14 статический радиус колеса [16]
r= 0,295 м.
7. Максимальная мощность двигателя.
Ne max= 77,2 кDт при 4750 об/мин;
8. Максимальный крутящий момент двигателя
Ме мах= 182 Н×м при 2500 – 3000 об/мин.
Определим курсовой угол автомобиля при выполнении первого маневра (своевременный поворот рулевого колеса и изменение направления движения). Курсовой угол автомобиля при входе в поворот (γ1) и при выходе из поворота определяются согласно формулам, приведенным в таблице 2.1:
γ1=g×φy×T1/(2×v) и γ2=g×φy×T1/v= 2×γ1.
Результаты расчетов по этим формулам оформляем в виде таблиц 2.3, 2.4, 2.5, 2.6 и 2.7, рисунков 2.9, 2.10, 2.11, 2.12 и 2.13 соответственно при времени Т1поворота рулевого колеса в одну сторону 0,5; 1; 1,5; 2; 3 с. φу= 0,5.
Таблица 2.3
Зависимость курсового угла при входе и выходе из поворота от скорости движения автомобиля при Т= 0.5 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
Курсовой угол γ1, рад |
0.245 |
0.123 |
0.082 |
0.061 |
0.049 |
0.041 |
0.035 |
0.031 |
0.027 |
|
Курсовой угол γ2, рад |
0.491 |
0.245 |
0.164 |
0.123 |
0.098 |
0.082 |
0.070 |
0.061 |
0.055 |
Таблица 2.4
Зависимость курсового угла при входе и выходе из поворота от скорости автомобиля при Т= 1 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
Курсовой угол γ1, рад |
0.491 |
0.245 |
0.164 |
0.123 |
0.098 |
0.082 |
0.070 |
0.061 |
0.055 |
|
Курсовой угол γ2, рад |
0.981 |
0.491 |
0.327 |
0.245 |
0.196 |
0.164 |
0.140 |
0.123 |
0.105 |
Таблица 2.5
Зависимость курсового угла при входе и выходе из поворота от скорости автомобиля при Т= 1,5 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
Продолжение таблицы 2.5
|
Курсовой угол γ1, рад |
0.736 |
0.368 |
0.245 |
0.184 |
0.147 |
0.123 |
0.105 |
0.092 |
0.082 |
|
Курсовой угол γ2, рад |
1.472 |
0.736 |
0.491 |
0.368 |
0.294 |
0.245 |
0.210 |
0.184 |
0.164 |
Таблица 2.6
Зависимость курсового угла при входе и выходе из поворота от скорости автомобиля при Т= 2 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
Курсовой угол γ1, рад |
0.981 |
0.491 |
0.327 |
0.245 |
0.196 |
0.164 |
0.140 |
0.123 |
0.105 |
|
Курсовой угол γ2, рад |
1.962 |
0.981 |
0.654 |
0.491 |
0.392 |
0.327 |
0.280 |
0.245 |
0.218 |
Таблица 2.7
Зависимость курсового угла при входе и выходе из поворота от скорости автомобиля при Т= 3 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
Курсовой угол γ1, рад |
1.472 |
0.736 |
0.491 |
0.368 |
0.294 |
0.245 |
0.210 |
0.184 |
0.164 |
|
Курсовой угол γ2, рад |
2.943 |
1.472 |
0.981 |
0.736 |
0.589 |
0.491 |
0.420 |
0.368 |
0.327 |
Как видим из рисунков 2.9 – 2.13 курсовой угол при входе и выходе из поворотов возрастает прямо пропорционально времени Т1 первой фазы поворота (увеличения угла поворота θ управляемых колес) и обратно пропорционально скорости движения. Так за времяТ1=0,5 с при возрастании скорости движения с 5 м/с до 20 м/с курсовой угол поворота автомобиля при входе в поворот увеличивается с 0,245 до 0,61 рад. При увеличение времениТ1 с 0,5 до 3 с при скорости движения 20 м/с курсовой угол γ1при входе в поворот увеличивается с 0,061 рад до 0,368 рад.

Рисунок 2.9 Зависимость курсового угла γ1и γ2от скорости движения приТ1=0,5с
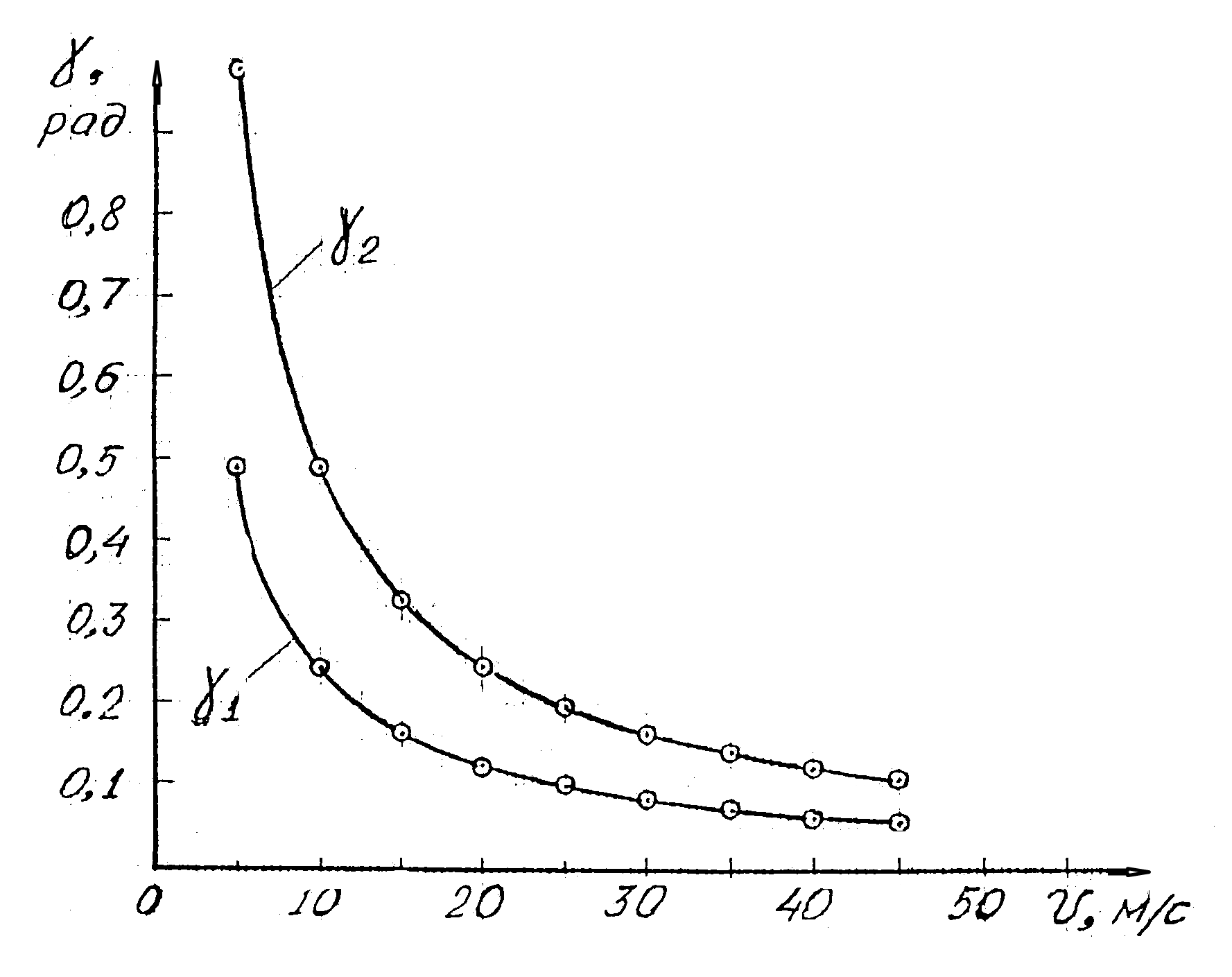
Рисунок 2.10 Зависимость курсового угла γ1и γ2от скорости движения приТ1=1с
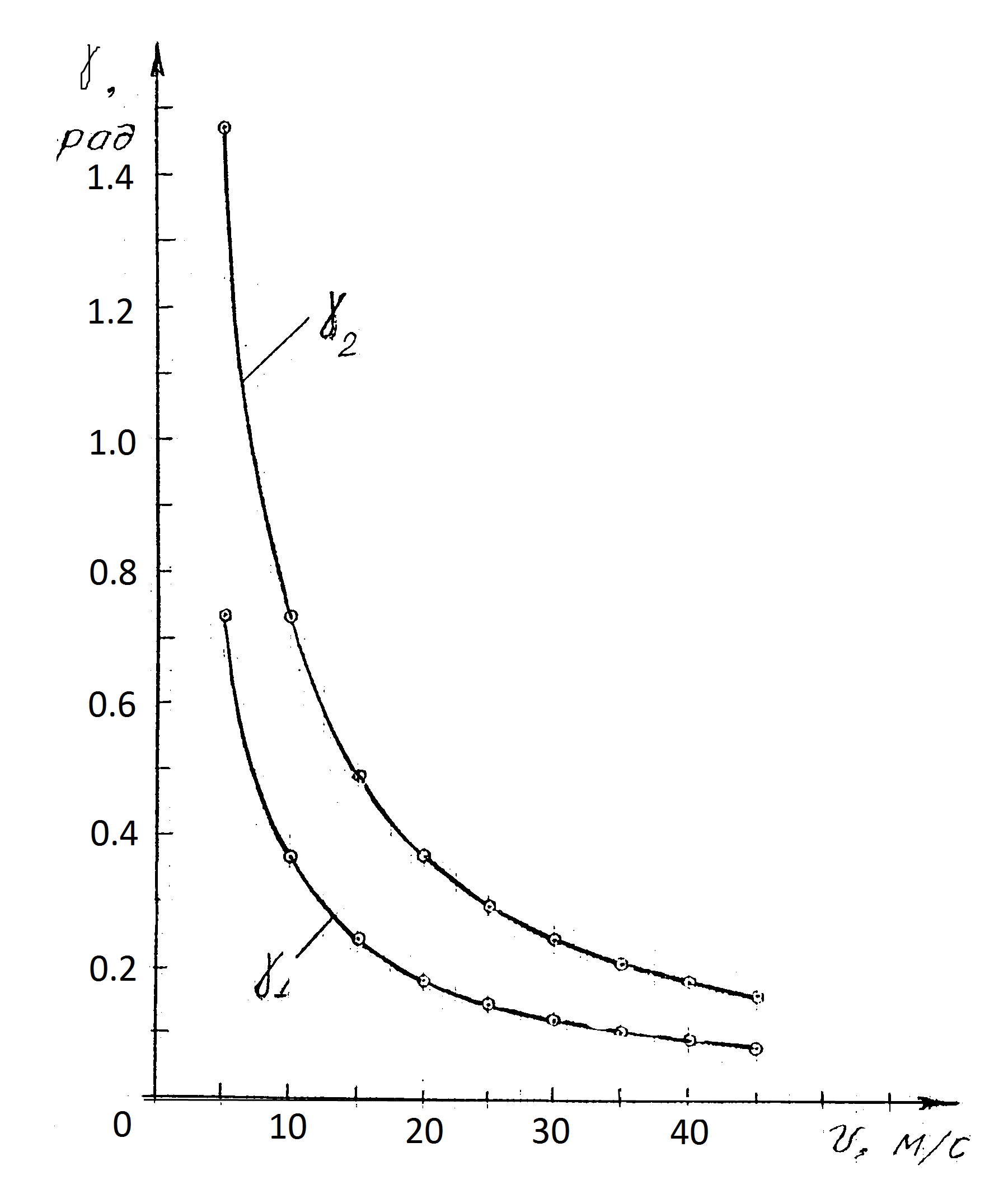
Рисунок 2.11 Зависимость курсового угла γ1и γ2от скорости движения приТ1=1,5 с
Таким образом, формулы, приведенные в таблице 2.1 позволяют найти γ, x,yи определить положение автомобиля на дороге в процессе входа в поворот.
Для оценки непосредственно связанной с управляемостью устойчивости переднего и заднего мостов автомобиля рассчитаем и построим график зависимости максимально возможной скорости без скольжения при совместном действии на автомобиль касательных и поперечных сил от удельной касательной реакции колес.
Максимальная скорость, с которой автомобиль может двигаться без скольжения при совместном действии касательных и поперечных сил, определяется по формуле:
v![]() =
=![]() .
(2.13)
.
(2.13)
где χ= Rx /Rz – удельная касательная реакция, равная для ведущего колесаFт /Rz, а для тормозногоFтор /Rz; для ведомого колесаχ=f. ПринимаемR=100 м;φ=0.7.
Результаты расчетов по формуле (2.13) оформляем таблицей 2.8 и рисунком 2.14.

Рисунок 2.12 Зависимость курсового угла γ1и γ2от скорости движения при
Т1=2,0 с

Рисунок 2.13 Зависимость курсового угла γ1и γ2от скорости движения при
Т1=3,0 с
Как видно таблицы 2.8 и рисунка 2.14 с
возрастанием удельной касательной
реакции χмаксимально возможная
скоростьv![]() без скольжения медленно убывает, а
при постоянной касательной реакции
возрастает в
без скольжения медленно убывает, а
при постоянной касательной реакции
возрастает в![]() раз, при увеличении радиуса поворота вKраз.
раз, при увеличении радиуса поворота вKраз.
Рассчитаем и построим график зависимости критической скорости автомобиля по условиям увода от отношения массы, приходящийся на заднюю ось к общей массе автомобиля.
Критическая скорость автомобиля по условиям увода определяется по формуле (2.10).
Таблица 2.8
Максимальная возможная скорость без скольжения при совместном действии на автомобиль касательных и поперечных сил
|
χ |
0,05 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,65 |
|
v |
26,171 |
26,07 |
25,653 |
24,909 |
23,739 |
21,923 |
18,807 |
15,965 |
|
v |
37,012 |
36,869 |
36,279 |
35,226 |
33,572 |
31,003 |
26,597 |
22,577 |
|
v |
45,330 |
45,155 |
44,432 |
43,143 |
41,117 |
37,971 |
32,575 |
27,652 |
|
vск(R=400м) |
52,343 |
52,140 |
51,306 |
49,817 |
47,478 |
43,845 |
37,614 |
31,929 |
|
vск(R=500м) |
58,521 |
58,295 |
57,362 |
55,697 |
53,082 |
49,020 |
42,054 |
35,698 |

Рисунок 2.14 Зависимость v![]() от удельной касательной реакцииχпри радиусе поворота:1– 100 м;2– 200 м;3– 300 м;4– 400 м;5–
500 м
от удельной касательной реакцииχпри радиусе поворота:1– 100 м;2– 200 м;3– 300 м;4– 400 м;5–
500 м

где М1иМ2 - массы отнесенные соответственно переднего и заднего мостов, кг;
kув1иkув2 - коэффициенты сопротивления увода соответственно переднего и заднего мостов, Н/рад.
Для мостов легковых автомобилей kувнаходится в пределах 33700…67500 Н/рад.
Для переднего моста грузовых автомобилей kув1= 78700…135000 Н/рад.
Для заднего моста грузовых автомобилей kув2= 157400…270000 Н/рад.
Расчет выполним для 3 вариантов значений kув1иkув2.
1. kув1= 50000 Н/рад;kув2= 40000 Н/рад;
2. kув1=kув2= 50000 Н/рад;
3. kув1= 40000 Н/рад;kув2= 50000 Н/рад;
Результаты расчета по формуле (2.10) оформляем в виде таблиц 2.9, 2.10, 2.11 и рисунка 2.15.
Таблица 2.9
Критическая скорость автомобиля по условиям увода (см. 1 вариант).
|
М2/М |
0,45 |
0,5 |
0,55 |
0,6 |
0,65 |
0,7 |
0,75 |
|
vув |
77,391 |
24,473 |
17,755 |
14,625 |
12,723 |
11,411 |
10,435 |
М– общая масса автомобиля.
Таблица 2.10
Критическая скорость автомобиля по условиям увода (см. 2 вариант).
|
М2/М |
0,45 |
0,5 |
0,55 |
0,6 |
0,65 |
0,7 |
0,75 |
|
vув |
– |
∞ |
27,36 |
19,348 |
15,797 |
13,681 |
12,237 |
Таблица 2.11
Критическая скорость автомобиля по условиям увода (см. 3 вариант).
|
М2/М |
0,45 |
0,5 |
0,55 |
0,6 |
0,65 |
0,7 |
0,75 |
|
vув |
– |
– |
– |
27,362 |
18,770 |
15,176 |
13,081 |
Как видно из рисунка 2.15 и таблиц 2.9, 2.10, 2.11 критическая скорость по условиям увода автомобиля ГАЗ – 31105 является очень высокой при М2/Мдо 0,5, затем она уменьшается достигая значений 10…13 м/с приМ2/М= 0,9. Наибольшее значениеvувнаблюдается в третьем варианте, когдаkув1= 40000 Н/рад;kув2= 50000 Н/рад, то есть наиболее приемлемым для поворачиваемости автомобиля ГАЗ – 31105 является превышение коэффициента сопротивления уводу задних колес по сравнению с передними.

Рисунок 2.15 Зависимость критической скорости автомобиля ГАЗ – 31105 по условиям увода от отношения М2/М:
1. kув1= 50000 Н/рад;kув2= 40000 Н/рад;
2. kув1=kув2= 50000 Н/рад;
3. kув1= 40000 Н/рад;kув2= 50000 Н/рад