

1.3. Кинематическая схема механизма
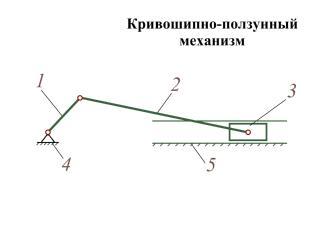
Кинематическая схема механизма - это схема механизма, в которой звенья и КП изображены условно, но в определенном масштабе с указанием необходимых размеров звеньев и направления движения ведущего звена
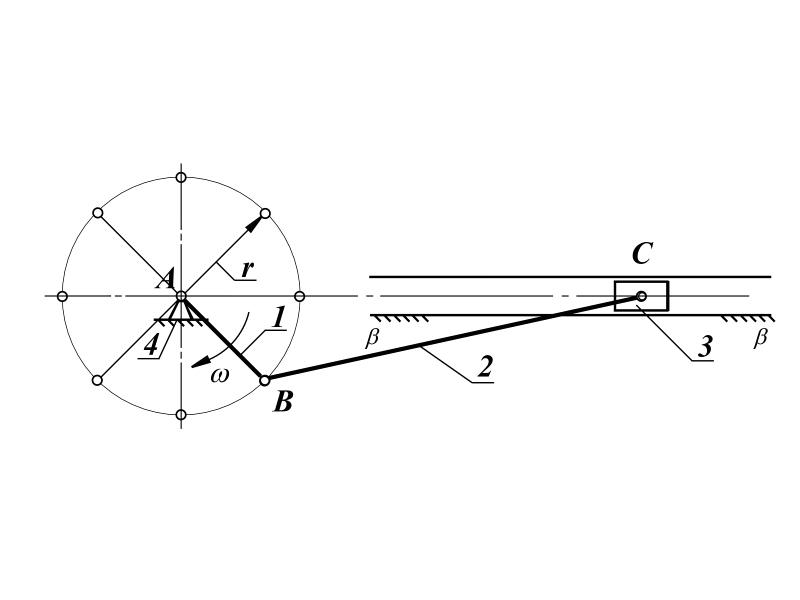
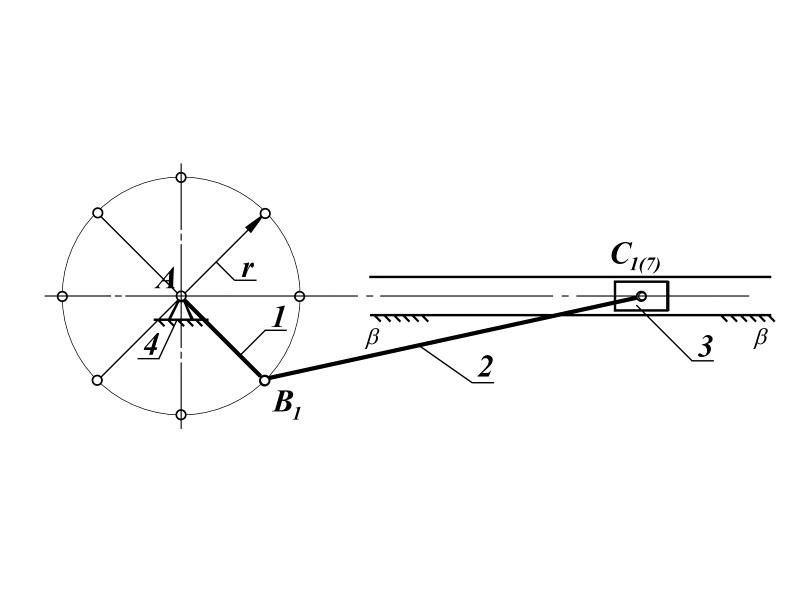
Рисунок 1.7 – Кинематическая схема кривошипно-ползунного механизма
На структурной схеме механизма масштаб не соблюдается.
Масштаб - это отношение какой-либо величины в соответствующих единицах измерения к величине отрезка, изображающего эту величину на чертеже.
Например:
![]() ,
,
![]() - масштаб длин или перемещений;
- масштаб длин или перемещений;
 - масштаб скорости;
- масштаб скорости;
 - масштаб ускорений.
- масштаб ускорений.
Основные виды механизмов:
плоские механизмы – все звенья располагаются в одной плоскости или в параллельных плоскостях;
пространственные механизмы – звенья лежат в разных плоскостях.
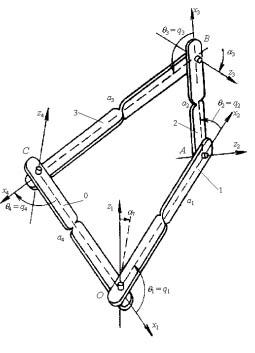
пространственный механизм
механизмы с гибкими связями (ременные и цепные передачи);
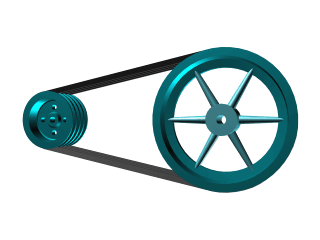
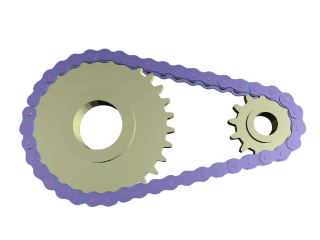
ременная передача цепная передача
м

 еханизмы
с высшими
и низшими
кинематическими
парами
еханизмы
с высшими
и низшими
кинематическими
парами
кулачковые, зубчатые, шарнирно-рычажные
фрикционные, храповые, механизмы
мальтийские механизмы
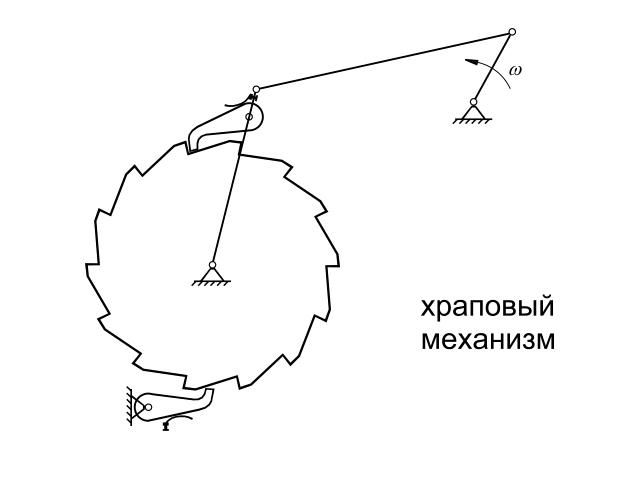
храповый механизм шестизвенный шарнирный механизм
зубчатая передача кривошипно-ползунный механизм
гидравлические и пневматические механизмы.
1.4. Степень подвижности (свободы) механизма
Для пространственного механизма степень подвижности определяется по формуле Сомова – Малышева:
![]() , (1)
, (1)
где n – число звеньев (подвижных и неподвижных) пространственного механизма;
![]() - число кинематических пар 5-го, 4-го, …,
1-го класса.
- число кинематических пар 5-го, 4-го, …,
1-го класса.
Степень подвижности плоского механизма определяется по формуле Чебышева:
![]() , (2)
, (2)
где n – число подвижных звеньев;
![]() - число кинематических пар 5-го класса;
- число кинематических пар 5-го класса;
![]() - число кинематических
пар 4-го класса.
- число кинематических
пар 4-го класса.
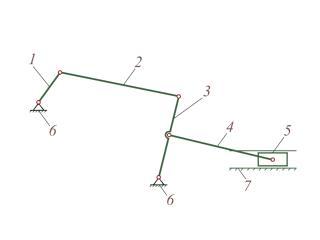
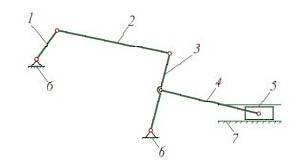
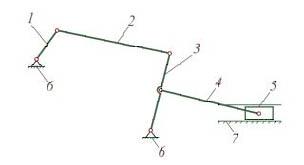
1 – кривошип, 2, 4 – шатуны, 3 – коромысло, 5 – ползун, 6 – стойка, 7 - направляющая.
Рисунок 1.8 – Шестизвенный механизм
- число подвижных звеньев равно 5;
- число кинематических
пар 5-го класса
![]() = 7 (стойка 6 – кривошип 1; кривошип 1 –
шатун 2; шатун 2 – коромысло 3; коромысло
3 – стойка 6; коромысло 3 – шатун 4; шатун
4 – ползун 5; ползун 5 – направляющая 7);
= 7 (стойка 6 – кривошип 1; кривошип 1 –
шатун 2; шатун 2 – коромысло 3; коромысло
3 – стойка 6; коромысло 3 – шатун 4; шатун
4 – ползун 5; ползун 5 – направляющая 7);
- число кинематических
пар 4-го класса
![]() = 0.
= 0.
Рассчитываем степень подвижности шестизвенного механизма:
![]() .
.
Степень подвижности механизма равна числу ведущих звеньев или числу двигателей.
1.5. Структурный анализ и синтез механизмов
Для того, чтобы спроектировать машину, необходимо выбрать рациональную схему, исключающую дополнительные структурные элементы, что может привести к дополнительным затратам энергии и снижению КПД.
1.5.1. Структурный синтез механизма – это проектирование структурной схемы механизма, то есть создание нового механизма.
Простейший или начальный механизм (группа начальных звеньев) состоит из ведущего звена и стойки (направляющей).
Начальный механизм может быть двух типов:
вращательная кинематическая пара (электродвигатель);
поступательная кинематическая пара (ДВС).
Более сложные механизмы получают путем присоединения к группе начальных звеньев структурных групп Ассура.
Диада – структурная группа из двух звеньев и трех кинематических пар.


диада №1 диада №2 диада №3
трехповодковая структурная группа Ассура
Рисунок 1.9 – Структурные группы Ассура
Пример.
Образовать 4-х-звенный механизм из группы начальных звеньев и диады №1.
1.5.2. Структурный анализ – это задача, обратная структурному синтезу, т.е. разложение кинематической цепи на структурные группы и выделение начального механизма (группы начальных звеньев).