

3.1.2. Задание модели дпт с использование передаточной функции
Задавшись структурной схемой двигателя постоянного тока, представленной на рисунке 3.3, можно найти передаточные функции двигателя по управлению W1(p)=ω(p)/U(p),W2(p)=M(p)/U(p) и по возмущению W3(p)=ω(p)/Mс(p). Для этого воспользуемся известными правилами преобразования структурных схем.
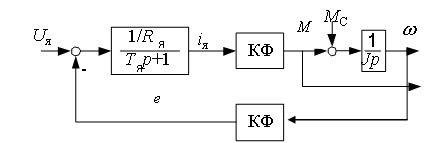
Рисунок 3.3 - Структурная схема ДПТ.
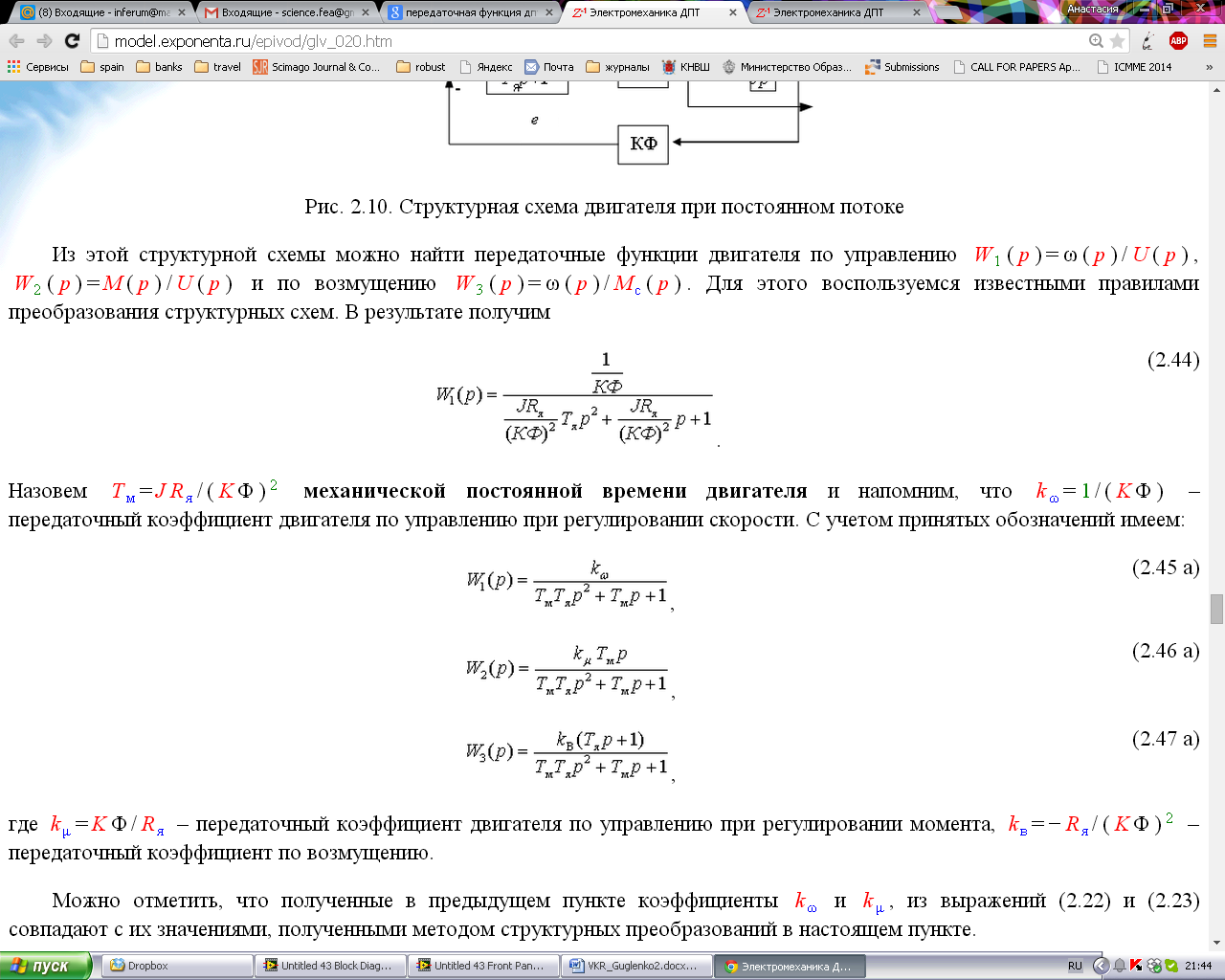
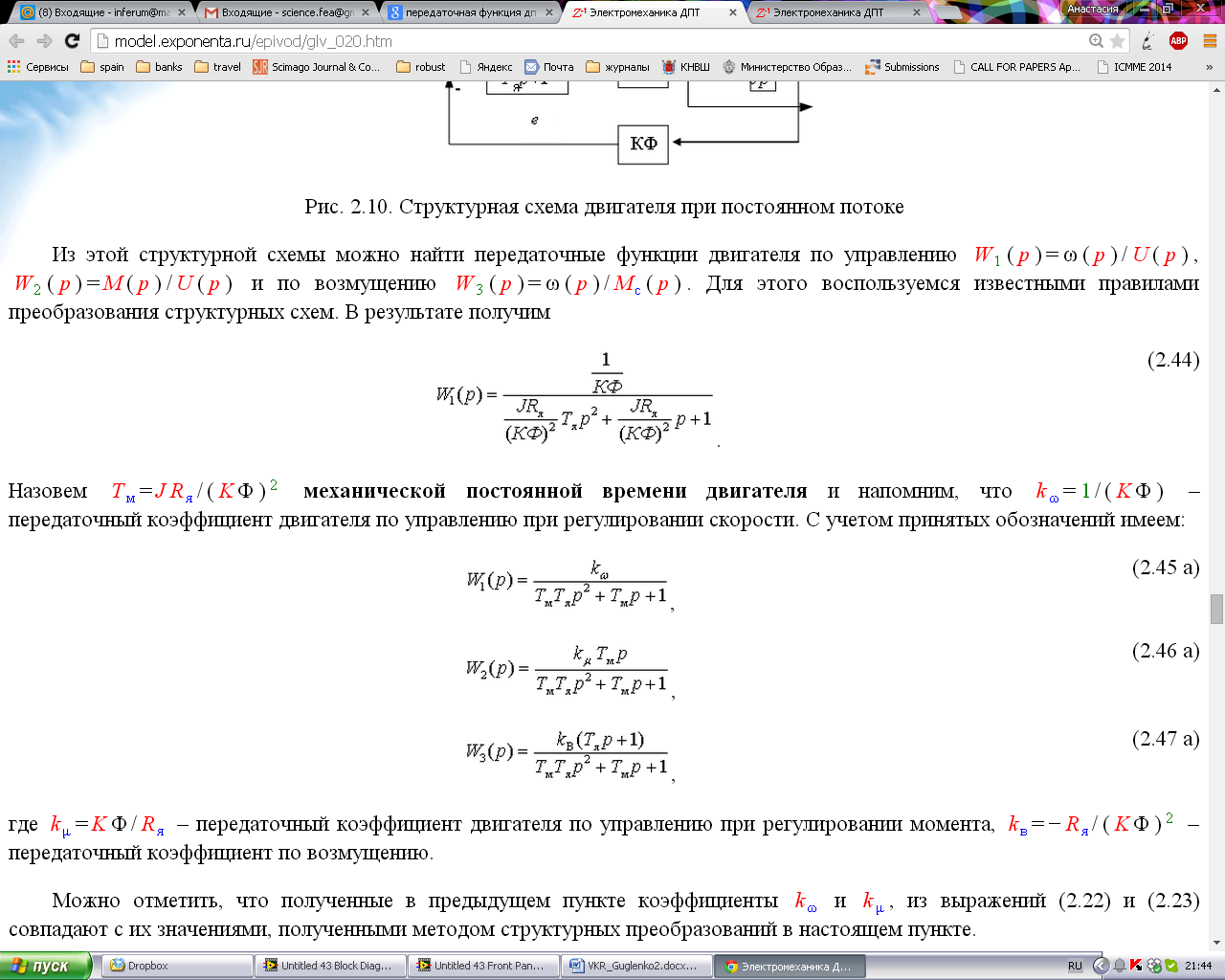
В результате получим:
 (3.1)
(3.1)
НазовемTм=JRя/(KΦ)2механической постоянной времени двигателяи напомним, чтоkω=1/(KΦ)– передаточный коэффициент двигателя по управлению при регулировании скорости. С учетом принятых обозначений:
 (3.2)
(3.2)
гдеkμ=KΦ/Rя– передаточный коэффициент двигателя по управлению при регулировании момента,kв=−Rя/(KΦ)2– передаточный коэффициент по возмущению.
Лицевая панель программы, реализующей построение математической модели ДПТ (разомкнутая система), представлена на рисунке 3.4.
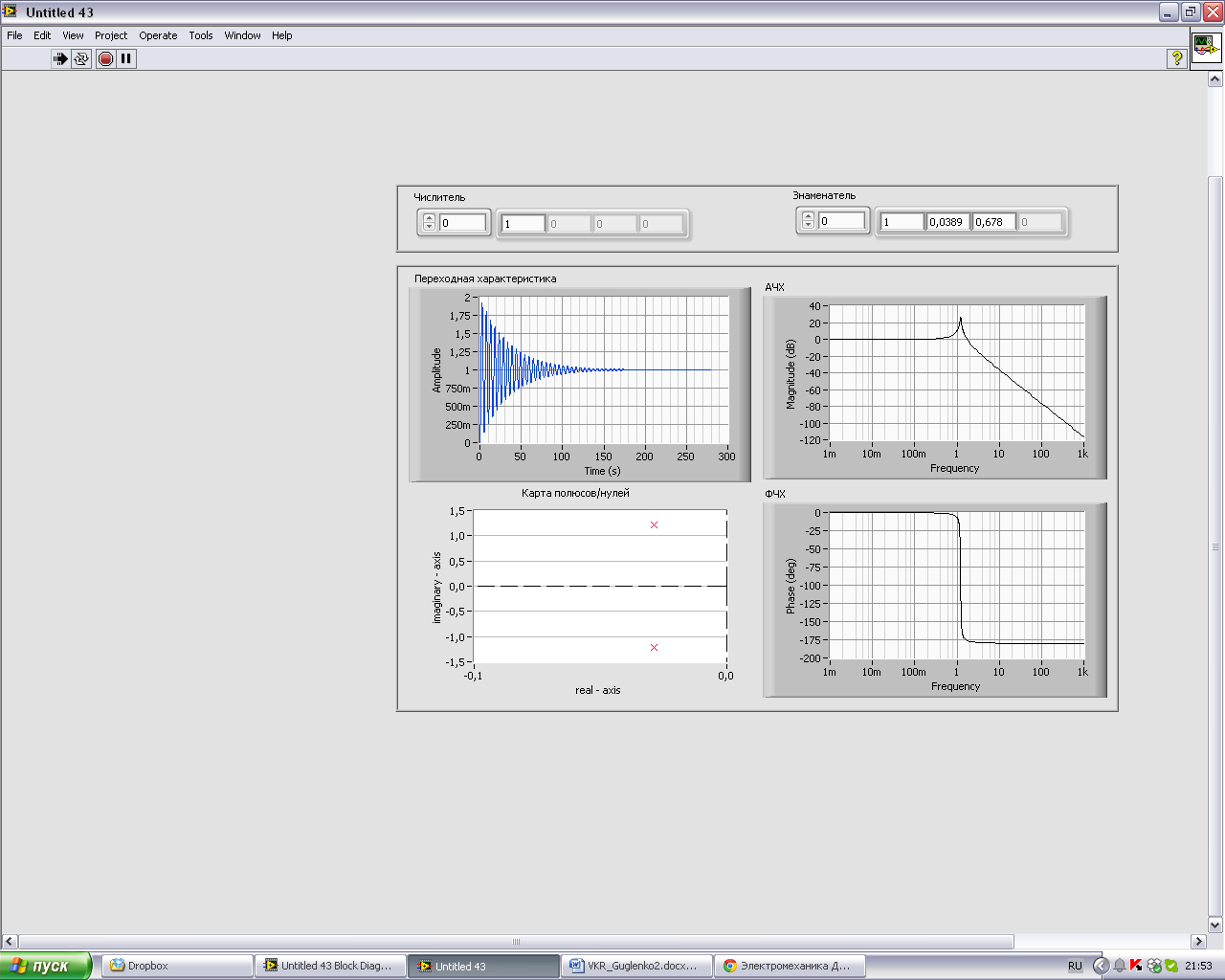
Рисунок 3.4 –лицевая панель программы.
При реализации данного подхода к реализации математической модели, в алгоритм программы были введены следующие функции, обеспечивающие исследования объекта управления:
построение переходной характеристики;
построение логарифмической амплитудно-частотной характеристики;
построение логарифмической фазовой-частотной характеристики;
построение карты полюсов и нулей;
3.1.3. Реализация модели посредством структурной схемы
Математическая модель двигателя постоянного тока может быть реализована посредством структурной схемы при использовании объединенного модуляControlDesign&SimulationModule. Принцип построения структурной схемы аналогичен работе в системеMatlab/Simulink.
На рисунке 3.5 представлена блок-диаграмма, реализующая структурную схему математической модели двигателя постоянного тока.
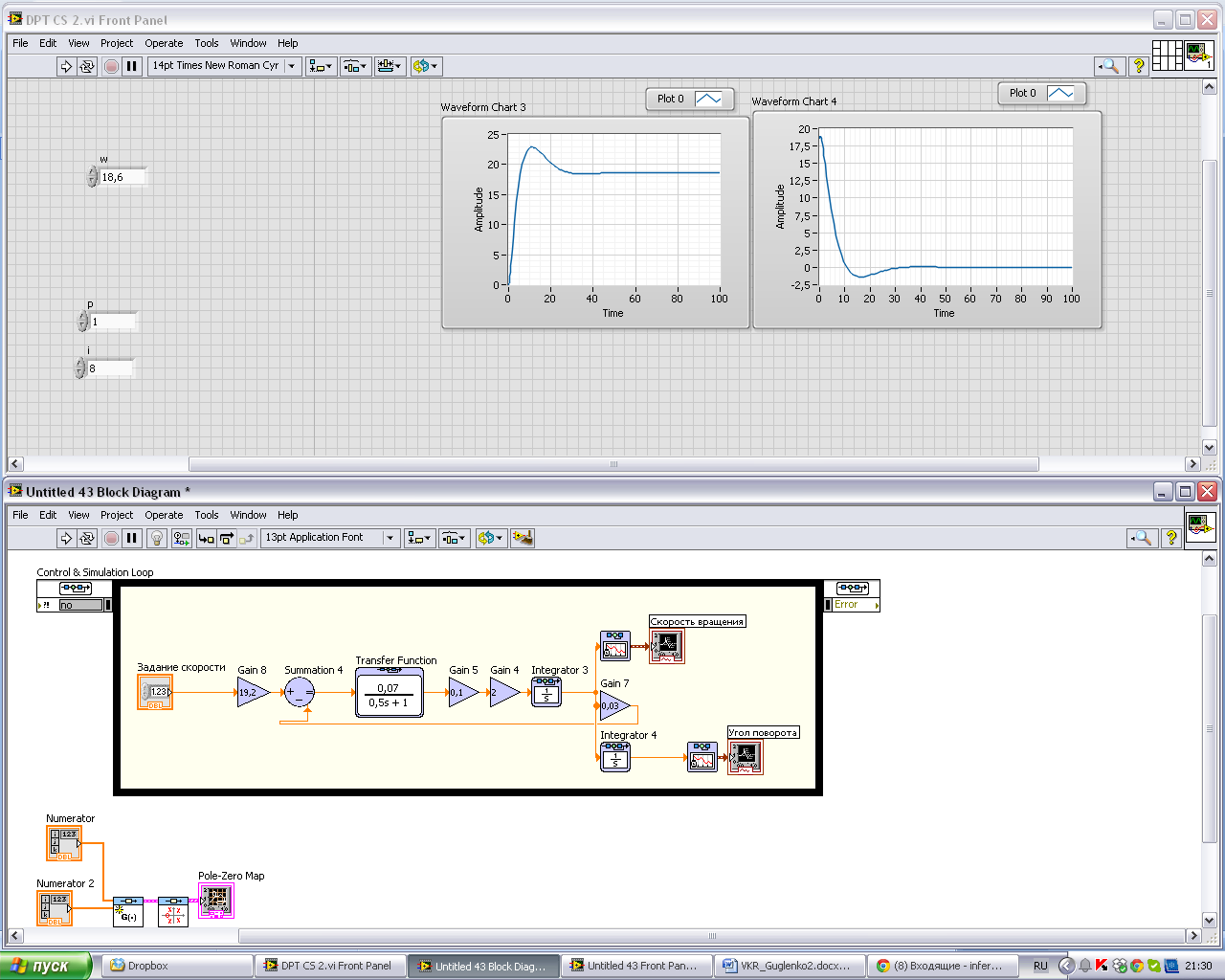
Рисунок 3.5 –блок-диаграмма программы.
Необходимо отметить, что данная реализация математической модели ДПТ впоследствии используется в проектируемой системе управления исследовательским стендом.
3.2. Разработка вариантов реализации измерительного канала
Контроллер (датчик) положения вращающегося объекта или по-другому энкодер- это электромеханическое устройство, с помощью которого можно определить положение вращающейся оси (вала). В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Датчики угла поворота (энкодеры) подразделяются на инкрементальные и абсолютные, которые могут достигать очень высокого разрешения. Абсолютные энкодеры в свою очередь могут быть как оптические, так и магнитные и могут работать через шинные интерфейсы. Они безусловно отвечают таким требованиям, как точность, надежность, повышенная износоустойчивость в течении длительного периода эксплуатации.
Инкрементальные энкодеры предназначены для определения скорости вращения и угла поворота вращающихся объектов. Они генерируют последовательный импульсный цифровой код, содержащий информацию относительно угла поворота объекта. Если вал останавливается, то останавливается и передача импульсов. Основным рабочим параметром датчика является количество импульсов за один оборот. Мгновенную величину угла поворота объекта определяют посредством подсчета импульсов от старта. Для вычисления угловой скорости объекта процессор в тахометре выполняет дифференцирование количества импульсов во времени, таким образом показывая сразу величину скорости, то есть число оборотов в минуту. Выходной сигнал имеет два канала, в которых идентичные последовательности импульсов сдвинуты на 90° относительно друг друга, что позволяет определять направление вращения. Имеется также цифровой выход нулевой метки, который позволяет всегда рассчитать абсолютное положение вала.
Абсолютные энкодеры, как оптические, так и магнитные имеют своей основной рабочей характеристикой число шагов, то есть уникальных кодов на оборот и количество таких оборотов, при этом не требуется первичной установки и инициализации датчика. Наиболее распространённые типы выходов сигнала — это параллельный код, интерфейсы Profibus-DP, CANopen, DeviceNet, SSI, LWL, через которые также осуществляется программирование датчиков. Представленные датчики обладают высоким разрешением вплоть до 36 бит.
Оптические энкодеры имеют жестко и закрепленный соосно валу стеклянный диск с прецизионной оптической шкалой. При вращении объекта оптопара считывает информацию, а электроника преобразовывает ее в последовательность дискретных электрических импульсов. Абсолютные оптические энкодеры — это датчики угла поворота, где каждому положению вала соответствует уникальный цифровой выходной код, который наряду с числом оборотов является основным рабочим параметром датчика. Абсолютные оптические энкодеры, так же как и инкрементальные энкодеры, считывают и фиксируют параметры вращения оптического диска.
Магнитные энкодеры с высокой точностью регистрируют прохождение магнитных полюсов вращающегося магнитного элемента непосредственно вблизи чувствительного элемента, преобразуя эти данные в соответствующий цифровой код.
Представленные датчики соединяются с вращающимся объектом посредством нормального или полого вала, последний может быть как сквозным, так и несквозным (тупиковым). Вал вращающегося объекта и вал энкодера соединяют механически при помощи гибкой или жесткой соединительной муфты. В качестве альтернативы энкодер монтируют непосредственно на вал объекта, если энкодер имеет полый вал. В первом случае вероятнаянесоосность и допустимые биения компенсируются деформацией гибкой втулки. Во втором возможна фиксация энкодера посредством штифта[20].