

Создание типового daq приложения
Разработка прикладных систем сбора данных выполняется с использованием VI из палитры NI Measurements в соответствии с основными этапами программирования, изображенными на рисунке 2.14.

Рисунок 2.14- Основные этапы создания DAQ-приложения
CreateTasksandChannels– создание задач и каналов;SetTiming(Optional) – установка режима тактирования (необязательно); SetTriggering (Optional) – установка режима запуска (необязательно); ReadorWriteData - запись или чтение данных; Clear – очистка.
Следует обратить внимание, что задание режимов тактирования и запуска не являются обязательными. Этап задания режима тактирования необходим при использовании аппаратной синхронизации. Если используется NI-DAQmx, параметры синхронизации могут быть определены в задаче с помощью DAQ Assistant.
Задание режима запуска используется, если необходимо выполнять сбор данных при реализации определенных условий, например при превышении входным сигналом уровня 4 В. При работе с NI-DAQmx конфигурирование режима запуска также может осуществляться с помощью задачи DAQ Assistant.
Большинство приложений NI-DAQmx содержат этапы запуска (Start), останова (Stop) и очистки (Clear) задачи. Например, в приложениях, в которых для подсчета фронтов или измерения периода используется таймер/счетчик, для управления счетчиком применяется VI Start [13].
NI-DAQmxLabVIEW очищает задачу автоматически по завершении работы иерархии VI, созданных задачей.
Палитра NI-DAQmx содержит VI для синхронизации, запуска, чтения и записи отсчетов. Для расширения функциональности VI NI-DAQmx можно использовать свойства.
Окно свойств нашего канала управления двигателем постоянного тока представлено на рисунке 2.15.
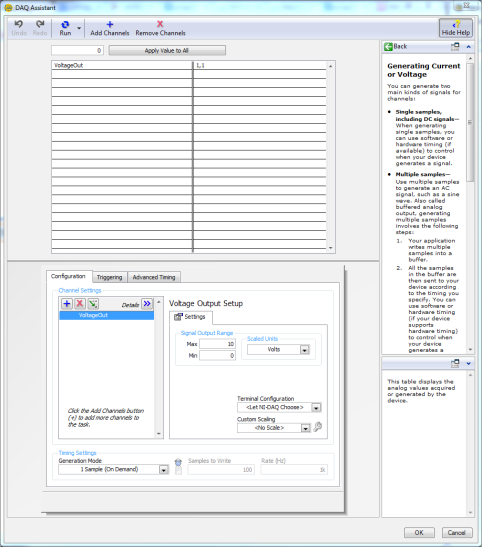
Рисунок 2.15 - Страница свойств компонента DAQAssistant.
Вывод:В данной главе по уравнениям, описывающим электрические процессы в ДПТ, была составлена структурная схема ДПТ. Произведен расчет параметров ДПТ для дальнейшей реализации модели вLabVIEW. В качестве управляющего устройства в будущей системе управления выбран ПИД-регулятор. Также сформирование канала управления с помощьюDAQAssistant.
3. Программное и методическое обеспечение исследовательского стенда с дпт
3.1Программная реализация математической модели дпт в LabView
Для программной реализации математической модели двигателя постоянного тока в пакете математического проектирования Labviewбыли использованы три метода:
Формирование модели с помощью цикла For;
Задание модели с использование передаточной функции;
Реализация модели посредством структурной схемы.
3.1.1. Формирование модели дпт с помощью цикла For
Использовав физическую модель двигателя, описание которой приведено в разделе 2.1,назначим входные величины [18]:
напряжение (Voltage) – U;
момент инерции (Torque) – J;
угловая скорость – w;
ток – I.
Все эти величины описаны в программе,блок-диаграмма которой представлена на рисунке 2.3 [19].
Ввод параметров двигателя осуществляется в компоненте Cluster «Motor_para», имеющем сопротивление цепи якоря R, коэффициент ЭДС двигателя k, крутящий момент J и величину времени dt.
С помощью данного подхода возможно реализовать математическую модель ДПТ и построить переходную характеристику скорости вращения ротора.

Рисунок 3.1 – блок-диаграмма программы.
Лицевая панель данного ВП представлена на рисунке 3.2

Рисунок 3.2 - Лицевая панель.