

2. Построение математической модели двигателя постоянного тока и системы тестирования
2.1 Математическая модель дпт
Важное свойство ДПТ с независимым возбуждением от постоянных магнитов состоит в том, что результирующий момент сил от всех проводников якоря, называемый электромагнитным моментом двигателя M, пропорционален току якоряIя, потребляемому двигателем от источника питания вычисляется по формуле 2.1:
 (2.1)
(2.1)
где km - коэффициент пропорциональности, называемый постоянной момента двигателя. Его размерность [Нм/А].
По законам электромагнитной индукции в проводнике, движущемся в магнитном поле, возникает электродвижущая сила. Суммарная ЭДС катушек якоря E через коллектор и щетки прикладывается к внешним выводам двигателя. В двигательном режиме работы эта ЭДС направлена против внешнего напряжения Uя, подведенного к якорю от источника питания. Поэтому ЭДС двигателя часто называется противоЭДС. Она прямо пропорциональна угловой скорости вращения вала двигателя ωдв[рад/с] (формула 2.2):
 (2.2)
(2.2)
где kω - коэффициент пропорциональности, называемый постоянной ЭДС двигателя. Его размерность [Вс/рад].
Природа электромагнитных явлений в ДПТ такова, что если используется система единиц СИ, то значения коэффициентов kω и km численно равны.
Рассмотрим уравнения, описывающие электрические процессы в ДПТ. В электрической якорной цепи двигателя протекает ток Iя под действием напряжения постоянного тока Ua источника питания и противоЭДС двигателя [15].
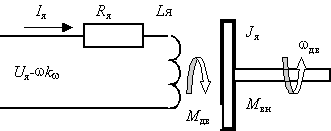
Рисунок 2.1 - Якорная цепь двигателя
Эта цепь характеризуется параметрами: активным сопротивлением Rя [Ом] и индуктивностью Lя[Гн] якорной обмотки. Вращающийся ротор, обладающий моментом инерции Ja[Нмс2/рад], приводится в движение одновременным действием электромагнитного момента двигателя Mдв и момента внешних сил Mвн, приложенного к валу двигателя.
Исходные дифференциальные уравнения ДПТ составляются на основании законов физики. Для электрической цепи используется второй закон Кирхгофа, согласно которому можно записать уравнение
 (2.3)
(2.3)
где член RяIя характеризует падение напряжения на активном сопротивлении якорной цепи в соответствии с законом Ома, а членLя(dIя/dt) отражает наличие ЭДС самоиндукции, возникающей в обмотке при изменении тока якоря. В уравнении 2.3 не учитывается падение напряжения на щетках, зависящее нелинейно от тока якоря, но имеющее, как правило, относительно небольшое значение по сравнению с напряжениемUя.
Дифференциальное уравнение, характеризующее процессы в механической части двигателя, составляется на основании второго закона Ньютона:
 (2.4)
(2.4)
где Mвн - момент внешних сил, действующий относительно оси вращения вала двигателя. В уравнении 2.4 не учитывается действие сил трения, возникающих при вращении ротора, но оказывающих относительно слабое действие на ускорение вала ДПТ.
Используя вышеприведенные формулы и приводя дифференциальные уравнения к нормальной форме Коши, получим описание ДПТ в форме:
 (2.5)
(2.5)
Для исследования процессов с помощью ЭВМ удобно использовать структурное представление математической модели ДПТ. Для этого преобразуем систему линейных дифференциальных уравнений 2.5 по Лапласу при нулевых начальных условиях. В результате получим систему алгебраических уравнений:
 (2.6)
(2.6)
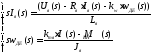
в которых s - переменная Лапласа, а величины Iя(s), wдв(s), Uя(s), Mвн(s) - изображения по Лапласу переменных Iя, wдв, Uя, Mвн соответственно. После эквивалентных преобразований системы 2.6 эти уравнения могут быть представлены в форме:
 (2.7)
(2.7)
где Тэ = Lя/Rя - электромагнитная постоянная времени якорной цепи двигателя.
По уравнениям 2.7 может быть сформирована структурная схема ДПТ для его математического моделирования (рисунок 2.2) [15].
Важным параметром ДПТ, определяющим его динамические свойства, является электромеханическая постоянная времени двигателя, вычисляющаяся по формуле 2.9:
 (2.9)
(2.9)
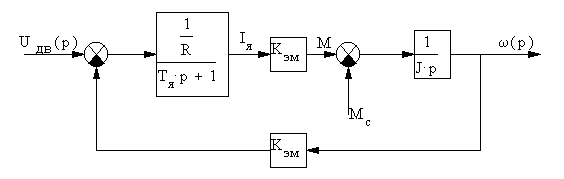
Рисунок 2.2–Структурная схема ДПТ
Зависимость между электромагнитным моментом двигателя и частотой вращения ротора в установившемся режиме при постоянных Uя и Mвн называется механической характеристикой двигателя. Уравнение механической характеристики имеет вид:
 (2.10)
(2.10)
При пуске двигателя, когда скорость равна нулю, развивается пусковой момент, определяющийся по формуле 2.11:
 (2.11)
(2.11)
Частота вращения вала двигателя при отсутствии сопротивления называется частотой вращения холостого хода, которая находится по формуле 2.12 [15]:
 (2.12)
(2.12)