

6 Свободные вертикальные колебания экипажа с одноярусным рессорным подвешиванием

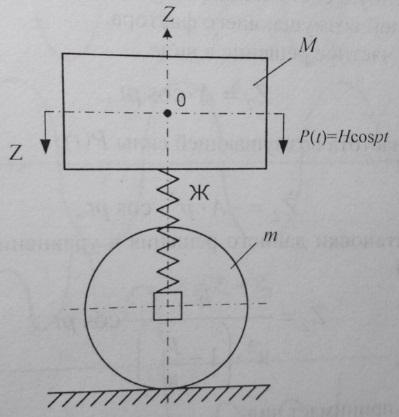
М – масса подрессоренных частей экипажа, Z – текущая координата вертикальных перемещений центра тяжести подрессоренных частей, Ж – жесткость упругого рессорного подвешивания (кН/м), m – масса неподрессоренных частей экипажа.
Пусть под воздействием единичного возмущения подрессоренная масса получит некоторую динамическую переменную Z1, что вызовет появление 2-х вертикальных сил: силы инерции (M*Z1) и упругие силы (Ж*Z1)
Под действием упругих сил система будет стремиться в исходное состояние.
Под действием сил инерции подрессоренная масса будет проскакивать положение равновесия, совершая периодические колебательные движения.
Уравнение
динамического равновесия системы: ![]() или
или ![]() ,
где
,
где ![]() – круговая частота, 1/с.
– круговая частота, 1/с.
1. Свободные колебания подрессоренной массы М носят синусоидальный характер с круговой частотой К. Эти колебания являются незатухающими, если в системе отсутствуют силы сопротивления (гасители колебаний).
2. Частота свободных незатухающих колебаний величина постоянная, зависящая только от инерционных и упругих переменных системы и не зависят от других условий.
3. Амплитуда свободных колебаний определяется параметрами системы и начальными условиями.
7 Вынужденные вертикальные колебания экипажа с одноярусным рессорным подвешиванием
Колебания происходят в результате действия периодически повторяющейся во времени силы P(t)/
Уравнения колебаний
![]()
![]()
![]()
Полное
решение уравнения такого вида будет
состоять из суммы общего решения
однородного уравнения Z1
и частного Z2.
![]()
Частное решение Z2 характеризует вынужденную составляющую колебаний
![]() ,
где
p
– круговая
частота возмущающей силы P(t).
,
где
p
– круговая
частота возмущающей силы P(t).
![]()

![]() ,
где Z1
– свободные колебания, а Z2
– вынужденные.
,
где Z1
– свободные колебания, а Z2
– вынужденные.
Под действием внешней периодически повторяющейся силы Р надрессорное строение совершает сложные колебательные движения, являющиеся результатом действия друг на друга свободных и вынуждающих колебани. При этом свободные колебания имеют частоту k=const, частота вынужденных колебаний определяется частотой возмущающей силы p≠const.
8 Резонанс колебаний
При
рассмотрении колебаний наибольший
интерес представляют вынужд. колеб;
амплитуда которых (Z2)
изменяется вместе с частотой внешних
сил. ![]() ,
при р=k
,
при р=k
![]()
![]()

Амплитуда увеличивается в течение каждого периода колебания на величину ΔZp. Этот процесс нарастания амплитуды называется резонансом колебаний. Если не будут приняты меры к ограничению амплит. колебан. в режиме резонанса могут создаться неблагоприятные условия для работы , вплоть до ее разрушения. Колебания, происходящие с одной из частот свободн. колебан. могут привезти к аварийной ситуации. Эти колебания называются главными колебаниями, а частоты свободных колебаний рассматриваемой сис-мы называются главными частотами.
9 Свободные вертикальные колебания систем с двумя степенями свободы

Z1, Z2 – координаты вертикальных перемещений центров тяжести масс кузова и подресс. частей тележки.
Уравнение колебаний кузова:
![]()
![]()
![]() –
уравн. колебан. подрессорен. части.
–
уравн. колебан. подрессорен. части.
![]()
![]()
![]()
![]()
K1,K2,K3-состовляющие порциальные частоты вертикальных колеб.
Решения уравнений:
![]()
![]()
![]() –
частоты сложного процесса свободных
колебаний
–
частоты сложного процесса свободных
колебаний

Как и в экипаже с 1-ярусным подвешиванием. частоты свобод. чолеб. зависят только от инерции и упругих параметров сис-мы. В процессе колебаний подресор. массы совершают вертикальные перемещения с амплитудой А и В одновременно, т.е. происходит наложение колебаний друг на друга.
