

8.6.1. Скорость точки
Найдем значение скорости точки
![]() .
Если за промежуток времени
.
Если за промежуток времени![]() точка совершит вдоль дуги траектории
перемещение
точка совершит вдоль дуги траектории
перемещение![]() ΔS(рис. 1.2), где одновременно ΔS–
приращение координатыS, то численно
средней скоростью точки за этот промежуток
времени будет
ΔS(рис. 1.2), где одновременно ΔS–
приращение координатыS, то численно
средней скоростью точки за этот промежуток
времени будет![]() и в пределе, найдем, что
и в пределе, найдем, что
|
|
(16) |
Таким образом, числовое значение скорости точки в данный момент времени равно первой производной от расстояния (криволинейной координаты) S этой точки по времени.
Значение скорости V можно также находить как отношение элементарного перемещенияdS точки к соответствующему промежутку времениdt. Так как всегдаdt>0, то знак скорости совпадает со знакомdS. Следовательно, когдаV>0, скорость направлена в сторону положительного отсчета расстоянияS, а когдаV<0, - в противоположную сторону. Таким образом, величинаVодновременно определяет и модуль скорости, и сторону, куда она направлена.
8.6.2. Ускорение точки
Установлено, что ускорение
![]() лежит в соприкасающейся плоскости, т.
е. в плоско-
лежит в соприкасающейся плоскости, т.
е. в плоско-
сти Mτn. Следовательно, проекция
вектора![]() на бинормаль равна нулю (
на бинормаль равна нулю (![]() ).
Найдем проекции
).
Найдем проекции![]() на две другие оси. Проектируя обе части
равенства
на две другие оси. Проектируя обе части
равенства![]() на осиМτиМnи обозначая
символами
на осиМτиМnи обозначая
символами![]() и
и![]() проекции вектора
проекции вектора![]() на
эти оси получим:
на
эти оси получим:
|
|
(17) |
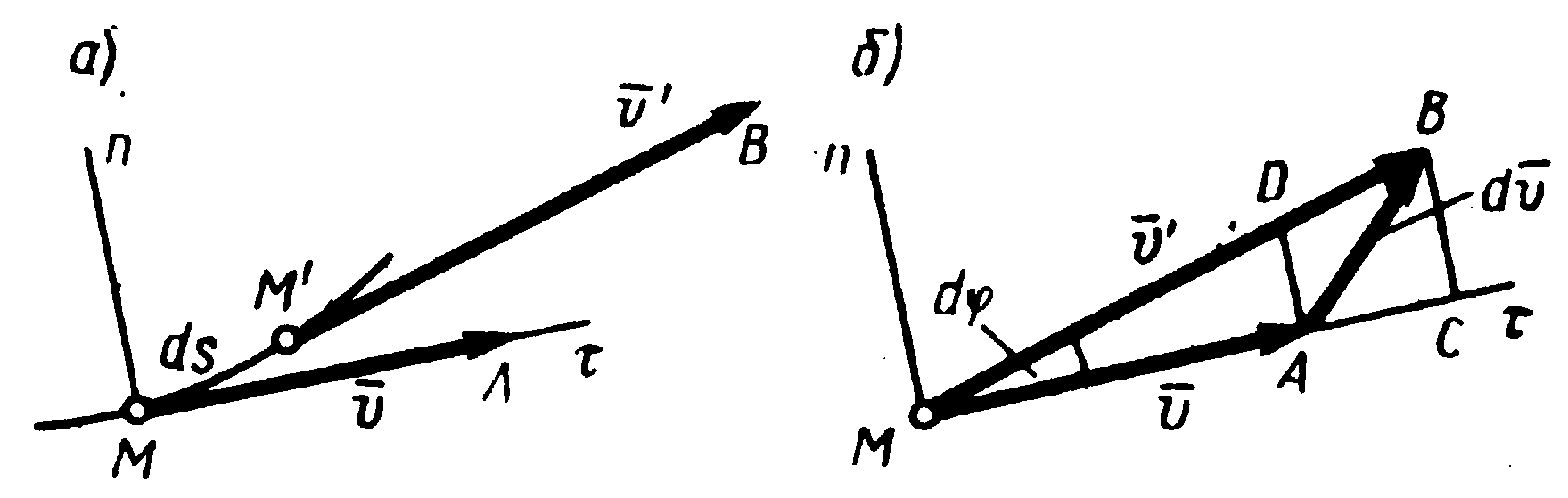
Рисунок 1.8
Вектор
![]() представляет
собой разность между скоростями в двух
соседних точкахМи
представляет
собой разность между скоростями в двух
соседних точкахМи![]() (рис.
123,Т), т.е.
(рис.
123,Т), т.е.![]() .
Отложим векторы
.
Отложим векторы![]() и
и![]() от общего начала (рис. 1.8), тогда
от общего начала (рис. 1.8), тогда![]() ,
а фигуруАСВDпри бесконечно малом
угле
,
а фигуруАСВDпри бесконечно малом
угле![]() можно рассматривать как прямоугольник.
Отсюда
можно рассматривать как прямоугольник.
Отсюда![]() ,
гдеdV – элементарное приращение
числового значения скорости. Далее,
поскольку предел отношения дуги к хорде
равен единице, можноАDрассматривать
как элементарную дугу радиусаМА,
размер которой определяется произведением
радиуса на центральный угол. Тогда
,
гдеdV – элементарное приращение
числового значения скорости. Далее,
поскольку предел отношения дуги к хорде
равен единице, можноАDрассматривать
как элементарную дугу радиусаМА,
размер которой определяется произведением
радиуса на центральный угол. Тогда![]() .
Подставляя найденные значения
.
Подставляя найденные значения![]() и
и![]() в формулы проекций
в формулы проекций![]() ,
получим:
,
получим:
|
|
(18) |
Угол между касательными к кривой в двух
ее точках называется углом смежности,
тогда![]() - элементарный угол смежности. Отношение
- элементарный угол смежности. Отношение![]() кdS=
кdS=![]() ,
определяет кривизну кривой в точкеМ,
а кривизнаkявляется величиной,
обратной радиусу кривизны в этой точке,
т.е.
,
определяет кривизну кривой в точкеМ,
а кривизнаkявляется величиной,
обратной радиусу кривизны в этой точке,
т.е.
|
|
(19) |
Введем эту величину в равенство
![]() и преобразуем его, учтя, что
и преобразуем его, учтя, что![]() ,
к виду
,
к виду
![]() .
.
В результате окончательно получим:
|
|
(20) |
Таким образом, проекция ускорения точки на касательную равна первой производной от числового значения скорости или второй производной от расстояния (криволинейной координаты) S по времени, а проекция ускорения на главную нормаль равна квадрату скорости, деленному на радиус кривизны траектории в данной точке кривой; проекция ускорения на бинормаль равна нулю.
Это одна из важных теорем кинематики.
Величины
![]() и
и![]() называюткасательныминормальнымускорениями точки.
называюткасательныминормальнымускорениями точки.
При движении точки Мв одной плоскости
касательнаяМτ поворачивается
вокруг бинормали Mbс угловой скоростью![]() .
Тогда
.
Тогда![]() дает еще одну формулу для вычисления
дает еще одну формулу для вычисления![]() :
:
![]() .
.
Это значит, что нормальное ускорение равно произведению скорости точки на угловую скорость поворота касательной к траектории.
Кроме числового значения полного
ускорения и его составляющих
![]() и
и![]() важно
знать их направление. Отложим вдоль
касательнойМτи главной нормалиMnвекторы
важно
знать их направление. Отложим вдоль
касательнойМτи главной нормалиMnвекторы![]() и
и![]() (рис.1.9). При этом составляющая
(рис.1.9). При этом составляющая![]() всегда направлена в сторону вогнутости
кривой, так как всегда
всегда направлена в сторону вогнутости
кривой, так как всегда![]() >0,
а составляющая
>0,
а составляющая![]() может быть направлена или в положительном,
или в отрицательном направлении осиМτв зависимости от знака
может быть направлена или в положительном,
или в отрицательном направлении осиМτв зависимости от знака![]() .
.

Рисунок 1.9
Вектор
![]() изображается диагональю параллелограмма,
построенного на
изображается диагональю параллелограмма,
построенного на![]() и
и![]() .
Так как эти составляющие взаимно
перпендикулярны, то модуль вектора
.
Так как эти составляющие взаимно
перпендикулярны, то модуль вектора![]() и угол µ его отклонения от нормалиMnопределяется формулами:
и угол µ его отклонения от нормалиMnопределяется формулами:
![]() ,
,
|
|
(21) |
где -
![]() ;
приµ>0 вектор
;
приµ>0 вектор![]() отклонен от нормалиMnв сторону осиМτ,а приµ<0 – в противоположную
сторону.
отклонен от нормалиMnв сторону осиМτ,а приµ<0 – в противоположную
сторону.
Таким образом, если движение точки
задано естественным способом, то, зная
траекторию (а, следовательно, и ее радиус
кривизны в любой точке) и закон движения,
т.е. зависимость
![]() ,
можно определить модуль и направление
векторов скорости и ускорения в любой
момент времени.
,
можно определить модуль и направление
векторов скорости и ускорения в любой
момент времени.