

13.3. Цилиндрические зубчатые передачи
Полученные в предыдущем параграфе результаты сложения вращательных движений используются для кинематического расчета зубчатых передач, образованных цилиндрическими зубчатыми колесами (шестернями). Рассмотрим основные виды этих передач.
Рядовойназывается передача, в которой все оси колес, находящихся в последовательном зацеплении, неподвижны. При этом одно из колес (например, колесо1на рис. 6.4) является ведущим, а остальные ведомыми. В случае внешнего (рис.6.4,а) или внутреннего
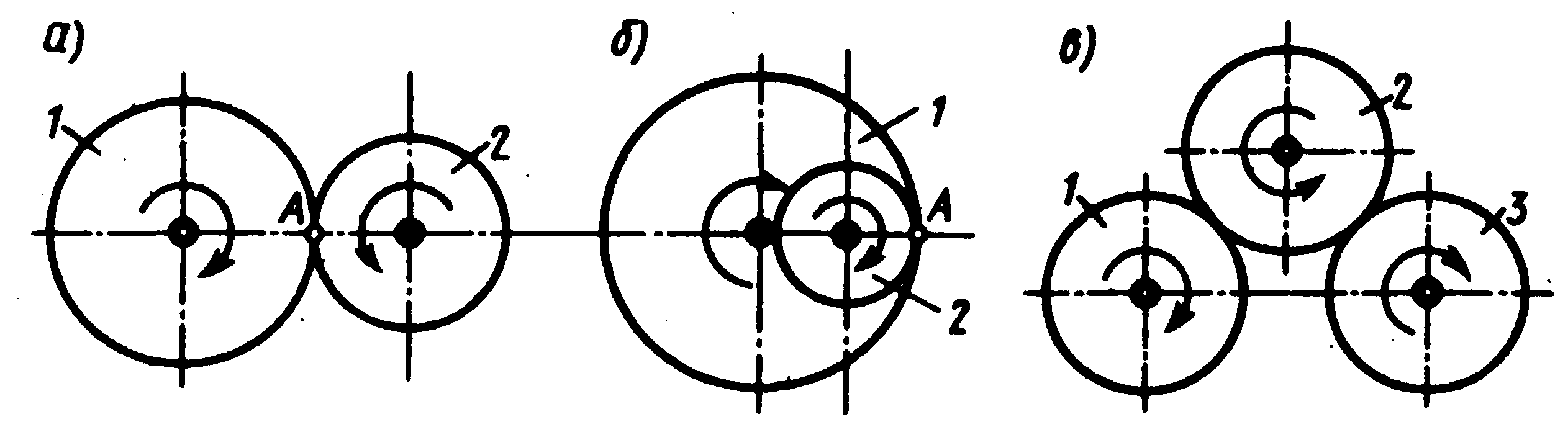
Рисунок 6.4
(рис. 6.4,б) зацепления двух колес можно
записать для точки А![]() ,
так как скорость точки сцепленияАу обоих колес одинакова. Число зубцовzсцепленных колес
пропорционально их радиусам, а вращения
колес происходит при внутреннем
зацеплении в одну сторону, а при внешнем
в разные. Тогда получаем
,
так как скорость точки сцепленияАу обоих колес одинакова. Число зубцовzсцепленных колес
пропорционально их радиусам, а вращения
колес происходит при внутреннем
зацеплении в одну сторону, а при внешнем
в разные. Тогда получаем
![]() ;
;![]() .
.
При внешнем зацеплении трех колес (рис. 6.4,в) найдем, что
![]()
![]() и
и![]() .
.
Следовательно, отношение угловых скоростей крайних шестерен в этой передаче обратно пропорционально их радиусам (числу зубцов) и не зависит от радиусов промежуточных (паразитных) шестерен. Во всех формулах надо учитывать знак ω(ω>0 при вращении против хода иω<0 при вращении по ходу часовой стрелки).
Из полученных результатов следует, что при рядном сцеплении шестерен
|
|
(82) |
где k– число внешних зацеплений.
Основной кинематической характеристикой
зубчатых передач является передаточное
число. Передаточным числомданной
зубчатой передачи называется величина![]() ,
представляющая отношение угловой
скорости ведущего колеса к угловой
скорости ведомого:
,
представляющая отношение угловой
скорости ведущего колеса к угловой
скорости ведомого:
|
|
(83) |
Сложение вращательных движений наблюдается в широко применяемых планетарныхпередачах. Любая планетарная передача состоит из трех групп элементов: центральных колес, колес сателлитов и кривошипов (водил). На рис. 6.5 показанапростая планетарная передача, в которой центральная шестерня1неподвижна, а оси стеллитов2и3, находящиеся в последовательном зацеплении, укреплены на кривошипе (водиле)АВ, вращающемся вокруг оси неподвижной центральной шестерни.
Дифференциальной планетарнойназывается передача, изображенная на рис. 6.5, если в ней центральная шестерня1подвижна и может вращаться вокруг своей осиАнезависимо от кривошипаАВ.
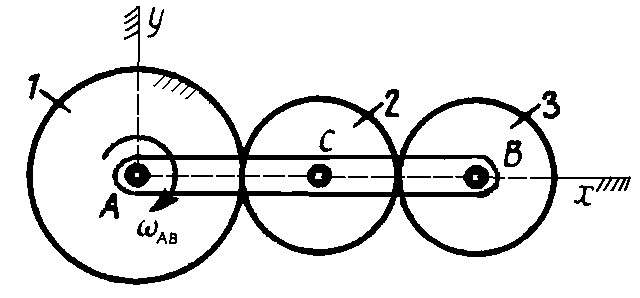
Рисунок 6.5
Для расчета планетарных передач можно
использовать метод остановки кривошипа
(водила) илиметод Виллиса.
Для этого даем мысленно основанию
механизма вращение с угловой скоростью,
равной по модулю угловой скорости
кривошипа (водила), но направленной в
противоположную сторону. Тогда кривошип
становится неподвижным, а угловые
скорости всех колес изменяются на
величину![]() ,
так как колеса механизма участвуют: 1)
в относительном вращении (по отношению
к кривошипу (водилу)) вокруг собственных
осей и 2) в переносном вращении вместе
с кривошипом (водилом) вокруг его оси.
,
так как колеса механизма участвуют: 1)
в относительном вращении (по отношению
к кривошипу (водилу)) вокруг собственных
осей и 2) в переносном вращении вместе
с кривошипом (водилом) вокруг его оси.
Переносной угловой скоростью для каждого
колеса является угловая скорость
кривошипа (водила)
![]() .
.
Относительные угловые скорости колес определяются как разности абсолютных и переносных угловых скоростей:

Эти относительные скорости являются угловыми скоростями колес при мысленно остановленном кривошипе (водиле).
В этом случае между относительными угловыми скоростями имеются такие же соотношения, как в зубчатых передачах с неподвижными осями вращений. Следовательно,
![]() ,
,
где k– число внешних зацеплений между колесами1иk;I– передаточное число от колеса1к колесуnв относительном движении (при остановленном кривошипе).
Это соотношение называют формулой Виллиса и в него входят алгебраические значения угловых скоростей.
Расчет планетарных передач можно также выполнить с помощью мгновенных центров скоростей.