

13.4. Сложение вращений вокруг пересекающихся осей
Пусть относительное движение тела представляет собой вращение с угловой ско-
ростью
![]() вокруг оси
вокруг оси![]() укрепленной на кривошипе2(рис.
6.5.а), а переносным является вращение
кривошипа с угловой скоростью
укрепленной на кривошипе2(рис.
6.5.а), а переносным является вращение
кривошипа с угловой скоростью![]() вокруг оси
вокруг оси![]() ,
которая с осью
,
которая с осью![]() пересекается в точкеО.
пересекается в точкеО.

Рисунок 6.5
Очевидно, что в этом случае скорость
точки О, как лежащей одновременно
на обеих осях, будет равна нулю и
результирующее движение тела является
движением вокруг неподвижной точкиО.
Тогда тело имеет в данный момент времени
угловую скорость![]() ,
направленную по мгновенной оси вращения,
проходящей через точкуО. Схематически
такой случай сложения вращений вокруг
пересекающихся осей показан на рис.
6.5,б.
,
направленную по мгновенной оси вращения,
проходящей через точкуО. Схематически
такой случай сложения вращений вокруг
пересекающихся осей показан на рис.
6.5,б.
Чтобы определить
![]() ,
найдем скорость точкиМтела
,
найдем скорость точкиМтела![]() и, определяя скорости точки как скорости
вращающегося тела
и, определяя скорости точки как скорости
вращающегося тела![]() и полгая
и полгая![]() ,
запишем
,
запишем
![]() так
так![]() .
Отсюда находим
.
Отсюда находим
|
|
(84) |
т.е. при вращении тела вокруг двух
осей, пересекающихся в точке О,
результирующее движение будет мгновенным
вращением вокруг оси Ос с угловой
скоростью ![]() ,равной геометрической сумме
,равной геометрической сумме ![]() .
Мгновенная осьОс, вдоль которой
направлен вектор
.
Мгновенная осьОс, вдоль которой
направлен вектор![]() ,
направлена по диагонали параллелограмма,
построенного на векторах
,
направлена по диагонали параллелограмма,
построенного на векторах![]() и
и![]() (рис. 6.5,б).
(рис. 6.5,б).
С течением времени ось Осменяет свое положение, описывая коническую поверхность, вершина которой находится в точкеО.
13.5. Сложение поступательного и вращательного движений. Винтовое движение
Рассмотрим тело, вращающееся с угловой
скоростью
![]() вокруг оси, жестко скрепленной с другим
телом, имеющим поступательное движение
со скоростью
вокруг оси, жестко скрепленной с другим
телом, имеющим поступательное движение
со скоростью![]() (рис.
6.6). В зависимости от значения углаαмежду векторами
(рис.
6.6). В зависимости от значения углаαмежду векторами![]() и
и![]() здесь
возможны три случая.
здесь
возможны три случая.
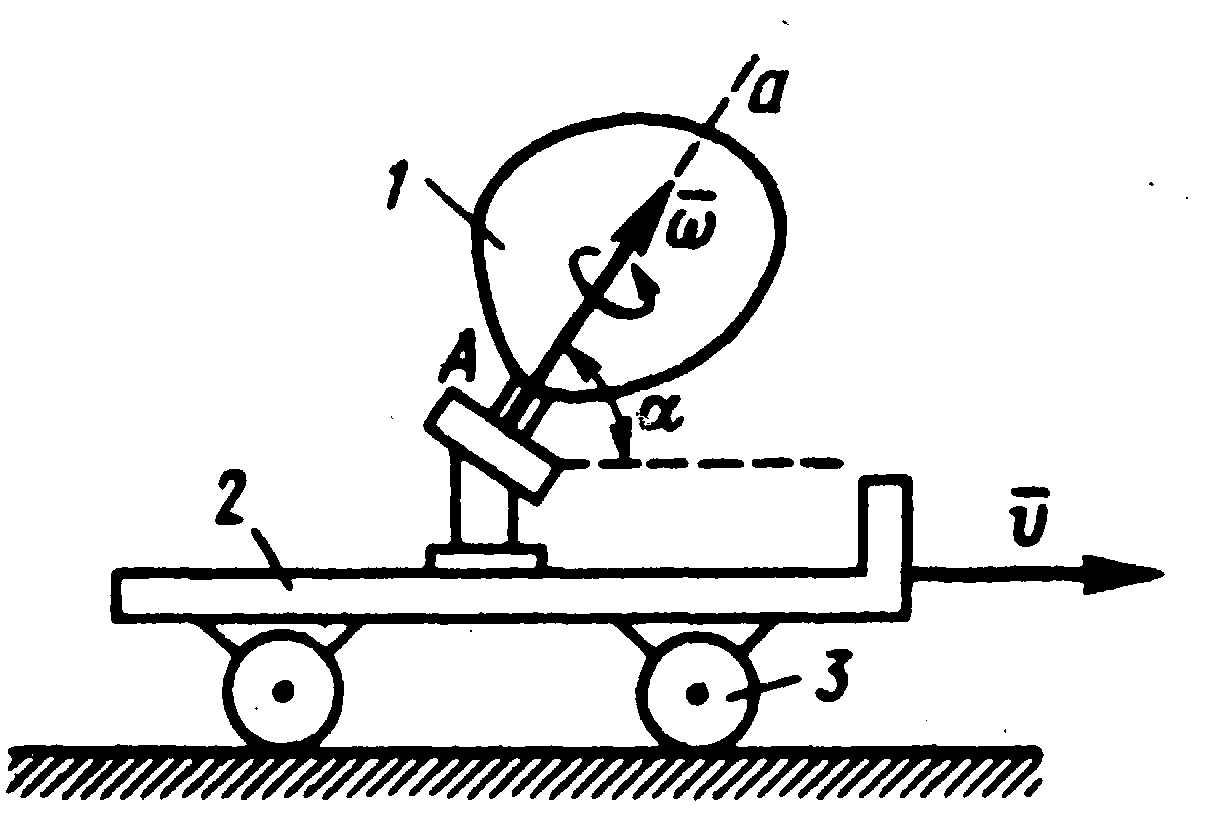
Рисунок 6.6
1. Скорость поступательного движения
перпендикулярна оси вращения (![]() ).Пусть сложное движение тела слагается
из вращательного движения вокруг осиАас угловой скоростью
).Пусть сложное движение тела слагается
из вращательного движения вокруг осиАас угловой скоростью![]() и поступательного движения со скоростью
и поступательного движения со скоростью![]() ,
перпендикулярной
,
перпендикулярной![]() (рис. 6.7). Легко видеть, что это
плоскопараллельное движение. Тогда
движение слагается из поступательного
со скоростью
(рис. 6.7). Легко видеть, что это
плоскопараллельное движение. Тогда
движение слагается из поступательного
со скоростью![]() (если
точкуАсчитать полюсом) и вращательного
вокруг осиАа, проходящей через
полюс.
(если
точкуАсчитать полюсом) и вращательного
вокруг осиАа, проходящей через
полюс.

Рисунок 6.7
Вектор
![]() можно
заменить парой угловых скоростей
можно
заменить парой угловых скоростей![]() ,
беря их соответственно
,
беря их соответственно![]() ,
а
,
а![]() .
При этом расстояниеАРопределится
из равенства
.
При этом расстояниеАРопределится
из равенства![]() ,
откуда (учитывая, что
,
откуда (учитывая, что![]() )
)
|
|
(85) |
Векторы
![]() при сложении дают нуль, и мы получаем,
что движение тела в этом случае можно
рассматривать как мгновенное вращение
вокруг оси
при сложении дают нуль, и мы получаем,
что движение тела в этом случае можно
рассматривать как мгновенное вращение
вокруг оси![]() с
угловой скоростью
с
угловой скоростью![]() ,
то есть точкаРявляется мгновенным
центром скоростей. Здесь мы еще раз
убеждаемся, что поворот тела вокруг
осейАаи
,
то есть точкаРявляется мгновенным
центром скоростей. Здесь мы еще раз
убеждаемся, что поворот тела вокруг
осейАаи![]() происходит
с одной и той же угловой скоростью
происходит
с одной и той же угловой скоростью![]() ,
т.е. вращательная часть движения не
зависит от выбора полюса.
,
т.е. вращательная часть движения не
зависит от выбора полюса.
2. Винтовое движение(![]() ).
).
Ось Ааназывают осью винта (рис.
6.8). Когда векторы![]() и
и![]() направлены
в разные стороны, то при принятом нами
правиле изображения
направлены
в разные стороны, то при принятом нами
правиле изображения![]() винт будет левым, если в одну сторону,
- правым.
винт будет левым, если в одну сторону,
- правым.

Рисунок 6.8
Расстояние, проходимое за время одного
оборота любой точкой, лежащей на оси
винта, называется шагом hвинта. Если величины![]() и
и![]() постоянны, то шаг винта также будет
постоянным. Обозначая время одного
оборота черезТ, получаем в этом
случае
постоянны, то шаг винта также будет
постоянным. Обозначая время одного
оборота черезТ, получаем в этом
случае![]() и
и![]() ,
откуда
,
откуда![]() .
.
При постоянном шаге любая точка Мтела, не лежащая на оси вала, описываетвинтовую линию.
Скорость произвольной точки Мслагается из переносной скорости
поступательного движения![]() ,
и перпендикулярной ей относительной
скорости
,
и перпендикулярной ей относительной
скорости![]() ,
получаемой во вращательном движении и
равной
,
получаемой во вращательном движении и
равной![]() ,
следовательно
,
следовательно
![]() .
.
3. Скорость поступательного движения образует произвольный угол с осью вращения. Сложное движение, совершаемое телом в этом случае, представляет собой общий
случай движения свободного тела. Разложим
вектор
![]() (рис. 6.9,а) на составляющие
(рис. 6.9,а) на составляющие![]() ,
направленную вдоль
,
направленную вдоль![]() (
(![]() ),
и
),
и![]() ,
перпендикулярную (
,
перпендикулярную (![]() ).
Скорость
).
Скорость![]() можно заменить парой угловых скоростей
можно заменить парой угловых скоростей![]() и
и![]() ,
после чего векторы
,
после чего векторы![]() и
и![]() можно отбросить. РасстояниеАСнайдем по формуле (78)
можно отбросить. РасстояниеАСнайдем по формуле (78)
![]() .
.
Тогда у тела остается вращение с угловой
скоростью
![]() и поступательное движе-
и поступательное движе-

Рисунок 6.9
ние со скоростью
![]() .
Следовательно, распределение скоростей
точек тела в данный момент времени будет
таким же, как и при винтовом движении
вокруг осиСсс угловой скоростью
.
Следовательно, распределение скоростей
точек тела в данный момент времени будет
таким же, как и при винтовом движении
вокруг осиСсс угловой скоростью![]() =
=![]() и поступательной скоростью
и поступательной скоростью![]() .
.
Проделанными операциями (рис. 6.9,б) мы
перешли от полюса Ак полюсуС.
Результат подтверждает, что в общем
случае движения твердого тела угловая
скорость при переносе полюса не
изменяется![]() ,
а меняется только поступательная
скорость.
,
а меняется только поступательная
скорость.
Так как при движении свободного твердого
тела величины![]() ,
,![]() иα будут все время изменяться, то
будет непрерывно изменяться и положение
осиСскоторую называют мгновенной
винтовой осью. Таким образом, движение
свободного тела можно еще рассматривать
как слагающееся из серии мгновенных
винтовых движений вокруг непрерывно
изменяющихся винтовых осей.
иα будут все время изменяться, то
будет непрерывно изменяться и положение
осиСскоторую называют мгновенной
винтовой осью. Таким образом, движение
свободного тела можно еще рассматривать
как слагающееся из серии мгновенных
винтовых движений вокруг непрерывно
изменяющихся винтовых осей.