

Diss / 19
.pdfУДК 621.396
СВЕРХРАЗРЕШЕНИЕ ИСТОЧНИКОВ СИГНАЛОВ В ТЕЛЕКОММУНИКАЦИОННЫХ СИСТЕМАХ, РАБОТАЮЩИХ В УСЛОВИЯХ ГОРОДСКОЙ ЗАСТРОЙКИ
Е.С. Макаров, С.А. Акулинин
Проведен обзор алгоритмов углового сверхразрешения, обладающих возможностью проведения автокалибровки каналов приема, для применения в телекоммуникационных системах с адаптацией диаграмм направленности антенных решеток. Получены точностные характеристики системы оценки угловых координат, функционирующей при наличии переотражателей электромагнитного поля вблизи подвижного объекта
Ключевые слова: антенные решетки, модель канала связи
Развитие систем беспроводной связи гражданского и специального назначения привело в настоящее время к высокой загруженности радиодиапазонов, что затрудняет дальнейшее повышение качества предоставляемых услуг. Одним из возможных путей решения является использование пространственного ресурса, связанного с использованием антенных решеток на приемной и передающей сторонах, что позволяет использовать адаптивное управление диаграммой направленности, реализуя тем самым принципы пространственного разделения пользователей [1].
Управление диаграммой направленности (ДН) антенной системы может проводиться с помощью алгоритмов теории адаптивных антенных решеток. Однако замирания сигнала, вызванные многолучевым распространением радиоволн, являются некоррелированными на различных частотах. Поэтому в системах, использующих различные частоты для приема и передачи, оказывается невозможным использовать для передачи весовые коэффициенты, рассчитанные при приеме. В связи с этим интерес представляет формирование ДН по результатам предварительного определения угловых координат абонентов.
Рассмотрим модель сигнала, принимаемого N- элементной антенной решеткой. Сигнал может быть представлен в виде:
|
R |
|
R |
R |
|
|
x |
(t ) = A(ϕm ) × s (t) + n(t) , |
(1) |
||
где приняты следующие обозначения: |
|
||||
R |
= [s1 (t),..., sM (t)]T |
|
|
|
|
s (t) |
– М-мерный вектор сигна- |
||||
лов. |
A(ϕm ) |
— |
N×M |
матрица |
вида |
R |
R |
|
|
|
|
[a(ϕ1 ),K, a(ϕM )], |
|
|
а |
||
R |
|
|
|
T |
|
a(ϕm ) = [e- j×ψ1 (ϕm ) , e- j×ψ 2 |
(ϕm ) ,..., e- j×ψ N (ϕm ) ] |
— |
|||
направляющий вектор для решетки данной геометрии, элементы которого определяются фазовыми набегами m-го сигнала на n-й АЭ. Например, для линейной эквидистантной антенной решетки
Макаров Евгений Сергеевич – ОАО «Концерн «Созвездие», канд. физ.-мат. наук, ст. науч. сотрудник,
тел. 8-908-131-75-71
Акулинин Станислав Алексеевич – ВГТУ, д-р физ.-мат.
наук, профессор, тел. 8-919-245-36-97
(ЛЭАР) фазовые набеги можно записать следующим образом:
ψ n |
(ϕm ) = |
2πd |
cos(ϕm ) , |
(2) |
|
||||
|
|
λ |
|
|
где n = 1KN , d – межэлементное расстояние, λ – длина волны, на которой ведется обработка.
R |
(t ) = [n1 |
(t),..., nN |
(t)]T — шумовой вектор, обра- |
n |
зованный суммой пространственного шума, принимаемого n-м АЭ, и шума n-ого канала приёма.
Предположим, что шум - гауссовский с нуле-
вым |
средним и ковариационной матрицей σ 2 I |
( σ2 |
- дисперсия шума, I - единичная матрица), а |
также, что сигналы некоррелированы и отсутствует корреляция между шумом и сигналами. Тогда пространственная корреляционная матрица может быть
записана в следующем виде: |
|
|
|
|
|
||||||||||
|
R = |
R |
|
R |
|
|
|
= AR ss A H + σ 2 I = |
|||||||
|
E[x(t)x H (t)] |
||||||||||||||
|
= E |
ΛE H |
+ E |
|
|
Λ E H |
|
|
|
, |
|||||
|
N |
|
|
|
|
||||||||||
|
|
|
s |
s |
s |
|
|
N N |
|
|
|
|
|||
где |
E[…] |
– |
статистическое усреднение, |
||||||||||||
R ss |
|
|
R |
R |
|
|
|
|
|
|
|
|
|
|
|
= E[s(t)s H (t)] - |
ковариационная |
|
матрица |
||||||||||||
сигналов, |
λ |
> K > λ |
M |
> λ |
M |
+1 |
= ... = λ |
N |
= σ 2 и |
||||||
|
|
|
|
1 |
|
|
|
|
|
|
|||||
R |
R |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
e1 |
, e |
2 ,..., eN |
– соответственно собственные значе- |
||||||||||||
ния и собственные векторы пространственной кова-
R |
R |
R |
|
риационной матрицы R, Es =[e1 |
, e2 |
,..., eM |
] - мат- |
рица сигнального подпространства, состоящая из собственных векторов, соответствующих M самым большим собственным значениям,
R |
R |
R |
|
En =[eM+1 |
, eM+2 |
,..., eN |
] - матрица шумового под- |
пространства, состоящая из собственных векторов, соответствующих N-M самым малым собственным
значениям, |
Ls =[l1 , l2 ,..., lM ] - диагональная |
матрица |
сигнальных собственных значений, |
Ln =[lM+1 ,lM+2 ,...,lN ] - диагональная матрица
шумовых собственных значений.
На практике пространственная ковариационная матрица получается из набора K временных отсчетов [5]:
96

ˆ |
1 |
K R |
|
H R |
|
|
R = |
|
∑ x(k ) |
|
x(k ) = |
|
|
|
|
|
||||
|
K k =1 |
|
|
, |
(3) |
|
ˆ |
ˆ |
ˆ H |
ˆ |
ˆ ˆ H |
|
|
= E s Λs E s |
+ E N ΛN E N |
|
||||
где x(k ) – выборка сигнала с элементов АР в
k-й момент времени, символ « » означает усреднение по K выборкам.
В диапазоне СВЧ сложность при использовании такой модели представляет наличие рассеивателей электромагнитного поля вблизи базовой и подвижной станций. Переотражения поля, вызванные рассеивателями, приводят к отклонению распределения поля в раскрыве антенной системы от номинального и ухудшению точностных характеристик системы.
Рассмотрим ситуацию, когда базовая станция расположена на некоторой высоте, а подвижный объект на поверхности земли. В таком случае рассеиватели в основном оказываются расположенными вблизи подвижного объекта (рис. 1).
ϕm
подвижный объект
2σ m
антенная решетка базовой станции
Рис. 1. Модель многолучевого канала связи
Теперь сигнал на антенной решетке принимает вид
|
R |
M R |
R |
|
R |
|
|
x(t ) |
= ∑vm × sm |
(t) + n(t) , |
(4) |
||
|
|
m=1 |
|
|
|
|
R |
N s |
R |
~ |
|
|
|
где vm |
= ∑α ik a(ϕm |
+ θ mk ) |
– так называемая |
|||
k =1
"пространственная подпись" сигнала m-го источника. Здесь α ik – амплитуда k-го луча, от-
раженного |
рассеивателями, |
а |
величина |
~ |
|
|
|
ϕm + θ mk – |
угол прихода k-го луча. |
|
|
Рассмотрим характеристики пеленгования при использовании моделей Ли [2] и Асзтели [3], отличающихся расположением рассеивателей. Геометрия канала связи, описываемая моделями Ли и Асзтели, представлена на рис. 2.
R
2σ m
 ϕm
ϕm
d
а
2σ m
 ϕm
ϕm
d
б
Рис. 2. а — Модель Ли, б — Модель Асзтели
Алгоритмы сверхразрешающего определения координат источников радиоизлучения
Метод MUSIC.
При реализации алгоритма используется свойство ортогональности векторов шумового подпространства и направляющих векторов:
R |
|
) = 0, |
q |
|
Î{q ,q |
|
,..., q |
|
}. |
(5) |
EH a(q |
m |
m |
2 |
M |
||||||
n |
|
|
1 |
|
|
|
Координаты сигналов будут соответствовать максимумам функции [4]:
|
|
R |
R |
|
P(q) = |
|
a H (q)a(q) |
||
|
|
|
. |
|
R H |
|
ˆ ˆ H R |
||
|
a |
(q)En En a(q) |
||
Метод проецирования сигнального подпространства.
Данный метод основан на определении наилучшего соответствия по критерию наименьших квадратов между собственными векторами подпространства сигналов корреля-
ционной матрицы ˆ и линейными комбинаци-
R
ями векторов поля на раскрыве АР путем решения следующей нелинейной задачи оптимизации [4]:
97
|
|
ˆ |
ˆ |
|
|
|
|
|
|
ˆ |
- AT |
|
2 |
|
|
Метод может быть реализован только при |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
{θ |
, T}= arg min |
|
|
|
ES |
|
, |
(6) |
условии [6]: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
θ ,T |
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
где |
|
|
... |
|
F - |
|
норма |
|
|
|
Фробениуса, |
|
|
N ³ |
2M 2 + rM + P - 2 |
, |
r = 1, 2 ,… |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2(M |
-1) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
ˆ |
H |
A) |
−1 |
A |
H ˆ |
. Задача минимизации ре- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
где N – |
число АЭ, M – |
число ИРИ, r – |
целое |
||||||||||||||||||||||||||||||||||||||
T = (A |
|
|
|
|
Es |
||||||||||||||||||||||||||||||||||||
шается в предположении определенного значе- |
число, определяющее тип проекции (r = 1- для |
||||||||||||||||||||||||||||||||||||||||
ния матрицы A [5]: |
ˆ |
ˆ |
ˆ |
|
}} , |
|
азимутальной проекции, |
|
r = 2- для азимуталь- |
||||||||||||||||||||||||||||||||
ˆ |
|
|
|
|
|
|
|
|
H |
|
ной и угломестной проекций), |
P – |
целое число, |
||||||||||||||||||||||||||||
θ |
= arg{minTr{ΠAES ΛS ES |
(7) |
зависящее от матрицы взаимного влияния C, |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
θ |
|
|
|
|
|
|
|
|
|
|
|
|
определяемое в (8). |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где Π |
= I - A(A H A) −1 A H |
- |
оператор про- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
В основе метода Фридландер-Вайса лежит |
||||||||||||||||||||||||||||||||||||||||
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
ецирования на подпространство, образованное |
условие (5), а в качестве целевой функции ис- |
||||||||||||||||||||||||||||||||||||||||
столбцами матрицы A , Tr{...} - след матри- |
пользуется видоизмененное выражение метода |
||||||||||||||||||||||||||||||||||||||||
цы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MUSIC: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Автокалибровочные алгоритмы опреде- |
|
|
|
|
|
M |
|
|
|
ˆ |
|
|
R |
|
|
|
|
2 |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
ления координат ИРИ |
|
|
|
|
|
|
|
|
|
f fw = ∑ |
|
|
|
E N CÃ a(θ m ) |
|
|
|
|
, |
(10) |
|||||||||||||||||||||
Основной недостаток методов определения |
|
... |
|
|
|
m=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
углов ИРИ заключается в том, что в реальности |
где |
|
- евклидова норма. |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
сканирующие векторы не имеют заранее из- |
|
Данный алгоритм основан на трех после- |
|||||||||||||||||||||||||||||||||||||||
вестной структуры, которая определяется толь- |
довательных этапах. На первом этапе оценива- |
||||||||||||||||||||||||||||||||||||||||
ко геометрией АР. Поскольку форма направля- |
ется направление прихода ИРИ, используя |
||||||||||||||||||||||||||||||||||||||||
ющих векторов меняется из-за взаимного влия- |
стандартный метод MUSIC, в предположении, |
||||||||||||||||||||||||||||||||||||||||
ния антенных элементов (АЭ), то они допол- |
что фазовые и амплитудные ошибки, а также |
||||||||||||||||||||||||||||||||||||||||
няются N×N матрицей взаимного влияния C и |
коэффициенты взаимного влияния АР извест- |
||||||||||||||||||||||||||||||||||||||||
неидентичности приемников Γ: |
|
|
|
|
ны. На втором этапе определяются фазовые φn |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
С = z0 (Z + z0 I)−1 , |
|
|
|
(8) |
и амплитудные gn ошибки n-го канала при из- |
||||||||||||||||||||||||||||||
Γ = diag{g1 exp( jφ 1),..., g n exp( jφn )} , |
|
вестных направлениях ИРИ и матрицы взаим- |
|||||||||||||||||||||||||||||||||||||||
|
ного влияния. На третьем этапе с учетом |
||||||||||||||||||||||||||||||||||||||||
где Z – |
матрица взаимных сопротивлений, |
z0 – |
|||||||||||||||||||||||||||||||||||||||
предыдущих этапов определяется матрица вза- |
|||||||||||||||||||||||||||||||||||||||||
сопротивление |
нагрузки, |
|
gn |
– амплитудная |
имного влияния АЭ. После каждой итерации |
||||||||||||||||||||||||||||||||||||
ошибка n-го канала, φn - фазовая ошибка n-го |
проверяется сходимость целевой функции. |
||||||||||||||||||||||||||||||||||||||||
канала, |
|
diag{¼} – |
функция |
формирования |
|
|
|
|
|
i |
|
i+1 |
|
£ e , |
|
|
|
|
|
|
(11) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
диагональной матрицы [5]. Тогда сигнал на вы- |
|
|
|
|
|
f fw - f fw |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
где е – |
порог, определяющий точность сходи- |
||||||||||||||||||||||||||||||||||||||||
ходе ЦАР записывается в следующем виде [5]: |
|||||||||||||||||||||||||||||||||||||||||
мости. При выполнении условия (11) алгоритм |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
R |
|
R |
|
||||||||||||||||||||||||
|
|
|
x(t ) = C ГA(qm )× s |
(t )+ n(t ) . |
(9) |
завершается, а при невыполнении – начинается |
|||||||||||||||||||||||||||||||||||
Тогда корреляционная матрица (8) с учетом |
|||||||||||||||||||||||||||||||||||||||||
новая итерация. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
матриц C и Γ приводится к виду: |
|
|
|
|
Метод Ванга-Кедзоу. |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
R |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
R = E[x(t)xH (t)] = СΓA R ss A H ΓH CH + s2I . |
|
Метод основан на использовании алгорит- |
|||||||||||||||||||||||||||||||||||||||
В этом случае задача автокалибровки сводится |
ма оптимизации Ньютона-Гаусса с применени- |
||||||||||||||||||||||||||||||||||||||||
ем ортогонализации |
Грамма-Шмидта, |
позво- |
|||||||||||||||||||||||||||||||||||||||
к определению координат ИРИ при наличии |
|||||||||||||||||||||||||||||||||||||||||
ляющий определить направления прихода ИРИ, |
|||||||||||||||||||||||||||||||||||||||||
ошибок и без дополнительных калибровочных |
|||||||||||||||||||||||||||||||||||||||||
фазовые и амплитудные ошибки в каналах, а |
|||||||||||||||||||||||||||||||||||||||||
устройств. Кроме того, значения матриц C и Γ |
|||||||||||||||||||||||||||||||||||||||||
могут изменяться в процессе работы АР под |
также ошибки расположения АЭ. Кроме того, |
||||||||||||||||||||||||||||||||||||||||
метод Ванга-Кедзоу использует метод проеци- |
|||||||||||||||||||||||||||||||||||||||||
влиянием перепадов атмосферного давления и |
|||||||||||||||||||||||||||||||||||||||||
рование |
сигнального |
подпространства. |
Метод |
||||||||||||||||||||||||||||||||||||||
температуры. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ванга-Кедзоу работает при следующих началь- |
||||||||||||||||||||||||||||
Исследования проводятся |
в |
|
предположе- |
||||||||||||||||||||||||||||||||||||||
|
ных условиях: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
нии использования условно-постоянной модели |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
EnH ГDA = 0, |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
неизменяемости ошибок только за время обра- |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
ботки, |
во время которой значения координат |
R |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
em = ГDAbm , для 1 ≤ m ≤ M , |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
ИРИ и ошибок определяются оптимизацией |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
различных целевых функций, реализованных в |
где bm – комплексный вектор M×1, D – |
матри- |
|||||||||||||||||||||||||||||||||||||||
методах Фридландер-Вайса [6], Ванга-Кедзоу |
ца ошибок расположения АЭ. |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
[7]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В этом случае задача оптимизации (6) сво- |
||||||||||||||||||||
Метод Фридландер-Вайса |
|
|
|
|
дится к поиску положения минимума целевой |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
98
функции вида:
M |
|
|
|
R |
R |
R |
|
|
|
2 |
|
|
|
|
|||||||
fwc = ∑ |
|
|
|
ˆ |
− ГDa(θm )bm |
|
|
|
, |
|
|
|
|
em |
|
|
|
||||
m=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(12)
Минимизация функции (12) осуществляется за два этапа. На первом этапе определяется орто-
гонализация Грамма-Шмидта ко всем столбцам матрицы Y(ξ) = Г(g)D(z)A(θ) , в результате
чего получаем:
Y(ξ ) = Q(ξ )R(ξ ) ,
R |
Q(ξ) - N×M |
матрица, |
где ξ = [θT , g T , d T ]T , |
||
состоящая из M ортонормальных |
векторов, |
|
R(ξ) - М×M верхняя |
треугольная |
матрица. |
Выполняя подстановку:
|
R |
|
−1 |
|
H |
|
|
R |
|
|
||
|
b m = |
R |
(ξ)Q |
|
|
ˆ |
|
|
||||
|
|
|
(ξ)em . |
|
|
|||||||
Задача минимизации (12) на втором этапе |
||||||||||||
сводится к: |
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
H |
R |
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
f wc |
= min ∑ |
(I − Q(ξ)Q |
ˆ |
|
|
|
(13) |
|||||
|
(ξ))em |
|
|
|
||||||||
|
ξ |
|
|
|
|
|
|
|
|
|
|
|
|
m=1 |
|
|
|
|
|
|
|
|
|
|
|
Уравнение (13) решается посредством алгоритма Гаусса-Ньютона:
ξi+1 = ξi |
− ∑Re{J mH (ξi )J m (ξi )} |
−1 |
||||
× |
||||||
|
M |
|
|
|
|
|
|
m=1 |
|
|
|
|
, |
M |
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
× ∑ Re{J mH (ξi )rm (ξi )} |
|
|
|
|||
m=1 |
|
|
|
|
|
|
R |
|
H |
|
R |
|
|
где rm (ξi ) = |
(I − Q(ξi )Q |
|
ˆ |
, |
J m (ξi ) - |
|
|
(ξi ))em |
|||||
|
R |
|
|
|
|
|
матрица Якоби от rm (ξi ) , i – |
номер итерации, |
|||||
k-й столбец матрицы Якоби вычисляется по формуле:
∂r (ξ |
k |
) R |
|
|
|
|
|
|
|
|
|
|
m |
ˆ |
≈ |
|
|
|
|
|
|
|
|
|
|
∂ξ k |
|
em |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂Y(ξ ) |
|
|
|
|
. |
||
≈ (I − Q(ξ )Q |
|
(ξ )) |
R(ξ ) |
|
|
|
||||||
|
|
Q |
|
R |
||||||||
H |
|
|
−1 |
H |
(ξ )em |
|||||||
|
|
|
|
|
|
|
|
|
ˆ |
|||
∂ξ k
После выполнения каждой итерации проверяется сходимость целевой функции:
f i |
− f i+1 |
≤ e . |
wc |
wc |
|
Главной особенностью данного метода является то, что на каждом шаге итерации одновременно определяются значения ошибок в каналах и позиционирования АЭ, а также направления прихода ИРИ.
Проведем численный анализ характеристик оценки угловых координат в условиях многолучевого распространения радиоволн при использовании линейной антенной решетки.
Примем отношение сигнал/шум равным 10 дБ. Число временных выборок равным ста. Рассмотрим восьмиэлементную линейную эквиди-
стантную антенную решетку с межэлементным расстоянием, равным половине длины волны. Угол прихода сигнала равен 60°. При проведении пеленгования методами высокого разреше-
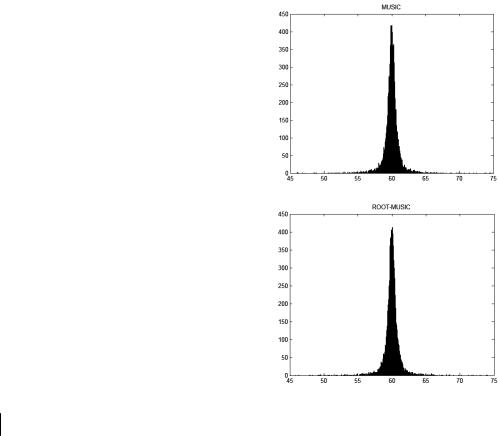
ния MUSIC и ROOT-MUSIC [8] для углового разброса 2σ m = 2° и числа рассеивателей N s ,
равного десяти, СКО оценок равно 1,3 и 1,3°, соответственно. Использовалась модель [2]. На рис. 3 приведены гистограммы оценок углов прихода сигналов. Оба метода показывают схожие результаты, поэтому в дальнейшем будем использовать ROOT-MUSIC как обладающий более высоким быстродействием. Заметим также, что если при отсутствии рассеивателей распределение оценок углов прихода является нормальным, то в данном случае оно отлично от нормального, что представляет предмет отдельного обсуждения.
а — Метод MUSIC
б — метод ROOT-MUSIC
Рис. 3. Гистограммы пеленгов
Рассмотрим влияние углового разброса и числа рассеивателей на характеристики измерителя угловых координат. Измерения, проведенные в [2], показывают, что в пригороде и за городом угловой разброс принимает значения от 2 до 6° при расстоянии между базовой станцией и подвижным объектом 1 км.
а
99

3,5 |
СКО, ° |
|
|
|
|
|
|
|
|
3 |
|
|
30 |
|
2,5 |
|
20 |
|
|
|
|
|
|
|
|
10 |
|
|
|
2 |
|
|
|
|
1,5 |
|
|
|
2σ m |
|
|
|
|
|
1 |
|
|
|
|
0 |
2 |
4 |
6 |
8 |
|
|
б |
|
|
Рис. 4. Зависимость СКО пеленгования от значения |
||||
углового разброса (а – |
модель Асзтели, б - модель Ли) |
|||
В работе проведен анализ точности оценки угловых координат подвижного объекта при наличии рассеивателей поля, расположенных вблизи объекта. Установлено, что методы MUSIC и ROOT-MUSIC в условиях слабой застройки показывают схожие результаты, однако распределение оценок угловых координат объектов отличается от нормального. Для определения угловых параметров сигнала реко-
мендовано применение модели пространственного канала связи, предложенной Асзтели в силу ее простоты.
Литература
1.A.E. Zooghby. Smart Antenna Engineering. Artech House, Inc. 2005
2.D. Asztely. On Antenna Arrays in Mobile Communication Systems: Fast Fading and GSM Base Station Receiver Algorithms. PhD dissertation, Royal Inst. Technology, 1996
3.W.C.Y. Lee. Mobile Communications Engineering. McGraw Hill, 1982.
4.Krim H. Two decades of Array Signal Processing Research / H. Krim, M. Viberg // IEEE Signal Processing Magazine. – 1996. – vol. 7. – P. 67 – 94
5.Qiong L. An Overview of Self-Calibration in Sensor Array Processing / L. Qiong, G. Long, Y. Zhongfu // Proceeding of 6th International Symposium on Antennas, Propaga-
tions and EM Theory. – 2003. – № 28. – P. 279 – 282
6. Friedlander B. Direction Finding in the Presence of Mutual Coupling / B. Friedlander, A.J. Weiss // IEEE Transactions on Antennas and Propagation. – 1991. - Vol. 39, - № 3.
–P. 273 – 284.
7.Wang C. Direction-Finding with Sensor Gain, Phase and Location Uncertainty / C. Wang, J.A. Cadzow // Proceeding IEEE ICASSP’YI. – 1991. - Vol. 2. - P. 1429 - 14 32.
8.Godara L.C. Smart Antennas. CRC Press, 2004
ОАО «Концерн «Созвездие», г. Воронеж Воронежский государственный технический университет
HIGH-RESOLUTION SMART ANTENNAS IN TELECOMMUNICATION APPLICATIONS
IN THE PRESENCE OF LOCAL SCATTERING
E.S. Makarov, S.A. Akulinin
The review of high-resolution angular estimation algorithms with auto-calibration capabilities is given. The effects of local scattering described by Lee's and Asztely' models on performance of DOA estimation are studied. Numerical results are presented that show no difference between considered models in sense of angular spread estimation
Key words: smart antennas, local scattering, spatial channel model
100