

Diss / 23
.pdfComparison of MUSIC and ESPRIT for Direction of Arrival Estimation of Jamming Signal
Jeong-Geun Hong†, Chan-Sik Park‡, and Bo-Seok Seo†
†Department of Electronics Engineering
‡ Department of Control & Robotics Engineering
Chungbuk National University
Chungbuk Cheongju-si, Korea
Email: boseok@cbnu.ac.kr
Abstract — For antijamming design of global positioning system (GPS) in military applications, the direction of arrival (DOA) estimation of jamming signal is positively necessary. The DOA estimation is also used in mobile communication systems to expand the coverage area or to increase the channel capacity, where the base station forms a beam to the direction of the user terminal. In this paper, we compare the performance of MUSIC and ESPRIT algorithms with two-dimensional antenna arrays. MUSIC and ESPRIT algorithms are two typical DOA estimation methods in nonparametric and parametric methods, respectively. With ESPRIT, we derive the estimates of two-dimensional azimuth and elevation from two one-dimensional DOAs. Computer simulations are shown to demonstrate the performance.
Keywords-direction of arrival (DOA); MUSIC; ESPRIT; twodimensional DOA
I.INTRODUCTION
In a global positioning system (GPS) or communication systems in military applications, jamming signal is the key impairment factor to disturb reliable communication [1][2]. To avoid the jamming attack, we first estimate the direction of arrival (DOA) of jamming signal and then control the direction of the receive array antenna. In mobile communications, the DOA of a user signal is estimated at the basestation for beamforming to the user terminal. The downlink beamforming can expand the coverage area by improving signal to noise power ratio (SNR) and increase the channel capacity by suppress the interference from other users’ signals [3].
One of the popular nonparametric DOA estimation methods is the multiple signal classification (MUSIC) algorithm [4]. The MUSIC algorithm is based on a subspace approach where the correlation matrix of received array signal is divided into a signal space and a noise space. A spatial spectrum is computed from the noise subspace and the DOAs are determined from the dominant peaks in the spectrum.
In parametric methods, the ESPRIT (estimation of signal parameters via rotational invariance techniques) is a popular algorithm [5]. ESPRIT is based on the characteristics of two shifted arrays where the correlation matrices of two same type arrays shifted away have the same eigenvalues. The ESPRIT
This work was supported by the National Research Foundation of Korean (NRF-20110014409).
algorithm provides superior resolution capability to the MUSIC algorithm even when the jamming power is low. However, the structure of the array is limited to the uniform linear array (ULA) in ESPRIT different from MUSIC [6][7].
In this paper, we compare the performance of the MUSIC and ESPRIT algorithms for DOA estimation of jamming signals in GPS applications. The number of jammers, the number of sensors constructing an array, and jamming to noise power ratio (JNR) are varied for comparison with 1D and 2D structures. For estimation of azimuth and elevation angles in two-dimensional (2D) structures, we use two one-dimensional (1D) ULAs perpendicular to each other and derive the angles from DOAs pairs.
The paper is organized as follows. In section II, we briefly explain the MUSIC and ESPRIT algorithms.The derivation of 2D azimuth and elevation angles from two 1D DOAs is also explained in the section. In section III, simulation results are given to compare the performance of the two algorithms in various environments. Finally, we conclude in section IV.
II.MUSIC AND ESPRIT FOR DOA ESTIMATION
A. System Model
To estimate the 1D DOA, a ULA composed of equispaced L sensors shown in Fig. 1 is considered. At time n, the array output signal is given by
é |
y1 |
ù |
é |
1 |
|
1 |
1 |
ùé |
|
|
ù |
é |
|
ù |
|
||
ê |
ú |
ê |
e jf1 |
|
e jf2 |
e jfM |
úês1 |
ú |
êw1 |
ú |
|
||||||
ê |
y |
2 |
ú |
ê |
|
úês |
2 |
ú |
êw |
ú |
|
||||||
ê |
|
ú |
ê |
|
|
|
|
|
úê |
|
ú |
ê |
2 |
ú |
(1) |
||
ê |
|
|
ú |
= ê |
|
|
|
|
|
úê |
|
ú |
+ê |
|
ú |
||
ê |
|
ú |
ê |
|
|
úê |
ú |
ê |
ú |
|
|||||||
ê |
y |
|
ú |
ê |
j(L-1)f1 |
|
j(L-1)f2 |
|
|
úê |
|
|
ú |
ê |
|
ú |
|
ê |
|
ú |
ê |
e |
e |
j(L-1)fM úês |
|
ú |
êw |
ú |
|
||||||
ë |
|
L û |
ëe |
|
|
|
ûë |
|
M û |
ë |
L û |
|
|||||
where fi =-2p(d / l)cosqi , d the separation between sensors, l the wavelength of the incident signal, and qm the DOA from i-th source. There are M jamming sources and sm is the signal radiated from the m-th source. The complex white
978-1-4577-1772-7/12/$26.00 ©2012 IEEE

|
|
|
|
|
|
|
|
|
|
where a(q) =[1 |
|
e jf |
|
e j(L-1)f ]T . |
|
|
|
|
|
|
|||||||||||||
|
qm |
|
qm |
|
|
|
|
|
C. |
ESPRIT Algorithm |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
For |
ESPRIT, |
|
we |
|
divide |
a |
ULA |
into two subarrays as |
||||||||||||||||
|
|
|
|
|
|
|
|
shown in Fig. 3. Two steering matrices A1 and A2 are |
|||||||||||||||||||||||||
1 |
|
2 |
|
|
|
|
L-1 |
L |
|
defined for the subarray 1 and 2, respectively. Then, the |
|||||||||||||||||||||||
|
|
|
|
|
|
outputs of the two subarrays are |
given by |
|
|
|
|
|
|||||||||||||||||||||
|
d |
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
y1 = A1s +w1 |
|
|
|
|
|
(6) |
||||||||
|
|
Figure 1. The structure of a ULA. |
|
|
|
|
|
|
|
|
|
|
|
|
y2 = A2Fs +w2 |
|
|
|
|
(7) |
|||||||||||||
Gaussian noise |
wm |
is |
assumed |
|
to be |
zero |
mean and |
where |
|
|
|
F= diag {e jf1 , |
|
|
, e jfM } |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
e jf2 , |
|
|
|
|
(8) |
||||||||||||||||||||||
E[w wH ] =s2d |
where E[ ] means expectation. The Eq. (1) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
l m |
lm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
can be expressed as a vector form |
|
|
|
|
After some tedious calculation, we can derive the |
||||||||||||||||||||||||||||
|
|
yn |
= A(q)sn +wn |
|
(2) |
following relationship between two unitary matrices |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U2 = U1Y |
|
|
|
|
|
|
(9) |
||||||||||||
where A(q) is called a steering matrix including the |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Y = T-1FT |
|
|
|
|
|
|
(10) |
||||||||||||||||
information about M DOAs. |
|
|
|
|
|
where T is M×M complex matrix satisfying U1 = A1T and |
|||||||||||||||||||||||||||
For 2D estimation of azimuth and elevation angles, L-type |
|||||||||||||||||||||||||||||||||
array is considered shown in Fig. 2. |
|
|
|
|
U2 = A2T . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
B. MUSIC Algorithm |
|
|
|
|
|
|
|
From Eq. (10), we know that Y is a similarity transform of |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
F , therefore, the two matrices have the same eigenvalues |
||||||||||||||||||||||||||
The MUSIC algorithm is based on subspace decomposition |
|||||||||||||||||||||||||||||||||
e jfm |
(m =1, , M ) . Therefore, we can estimate the DOAs by |
||||||||||||||||||||||||||||||||
of the covariance matrix of the array output given by |
finding the eigenvalues of Y . |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
R =E éynynH |
ù= A(q)PAH (q) +s2I |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
(4) |
To find Y in Eq. (9), either an LS |
method (LS-ESPRIT) |
|||||||||||||||||||||||||||||||
|
|
ê |
|
ú |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
û |
|
|
|
|
|
or a TLS method (TLS-ESPRIT) may be used. The solution |
|||||||||||||||||||||||
where the source covariance matrix P = E ésnsnH ù |
|
||||||||||||||||||||||||||||||||
is an L´L |
of Y in LS-ESPRIT is given by [9] |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
ê |
ú |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
û |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
diagonal matrix. From the eigendecomposition of the |
|
|
|
|
|
|
|
|
|
|
H |
|
-1 |
H |
|
|
|
|
|
|
|||||||||||||
covariance matrix, Eq. (4) becomes |
|
|
|
|
|
|
|
|
|
YLS =(U1 |
U1) |
|
U1 |
U2 |
|
|
|
|
(11) |
||||||||||||||
|
|
|
|
H |
+s |
2 |
H |
|
(5) |
The TLS solution is represented as [9] |
|
|
|
|
|
||||||||||||||||||
|
|
R =UsLs Us |
|
UnUn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
(12) |
||||||
where Us and Un are unitary matrices defined in a signal |
|
|
|
|
|
|
|
YTLS =-V12V22 |
|
|
|
|
|
|
|||||||||||||||||||
where two M×M matrices V12 |
and V22 are determined from |
||||||||||||||||||||||||||||||||
space and a noise space, respectively, and Ls is a diagonal |
|||||||||||||||||||||||||||||||||
matrix with |
eigenvalues l1 ³l2 ³ ³lM |
being diagonal |
the following singular value decomposition (SVD) of the |
||||||||||||||||||||||||||||||
elements. Since the signal and noise spaces are orthogonal each |
augmented matrix [U1 U2 ] |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
other, the spatial spectrum defined as Eg. (5) yields peak at the |
|
|
|
|
|
|
|
|
|
é |
|
D |
|
|
|
|
0 |
|
ù |
éV |
V |
ù |
H |
||||||||||
DOA. |
|
|
|
|
|
|
|
|
|
[U U |
|
] = |
[U |
|
U |
|
|
M´M |
|
|
M´M |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
]ê |
0 |
|
|
D |
|
ú |
ê 11 |
12 |
ú |
(13) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
A |
|
B |
ê |
(L-1-M )´M |
(L-1-M )´M |
ú |
êV V |
ú |
|
||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
û |
ë 21 |
22 |
û |
|
|||||||
|
|
P(q) = |
|
|
|
|
(5) |
If the number of samples (or snapshots) are sufficiently |
|||||||||||||||||||||||||
|
|
aH (q)UnUnH a(q) |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
large, the performance is known to be same for TLS and LS |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
methods. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
subarray 1 |
|
|
|
subarray 2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
L-1 |
|
L |
|
|
|
|||
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure 2. The structure of a 2D array antenna.. |
Figure 3. The antenna array for an ESPRIT method. |
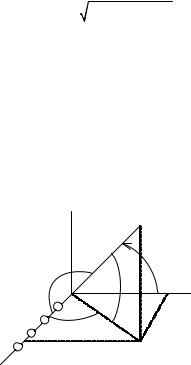
D. 2D DOA Estimation from 1D DOA pairs
From two orthogonally spaced 1D ULAs, we estimate two DOAs for one jammer and then derive 2D azimuth and elevation angles by using them. Let α and β be the two DOAs estimated from two ULAs as shown in Fig. 4. Then, the azimuth ρ and elevation φ can be represented as
r = cos-1 cos2 a+cos2 b |
(14) |
||||
|
-1 |
æ |
ö |
|
|
j = tan |
çcos b÷ |
(15) |
|||
|
ç |
|
÷ |
||
|
|
||||
|
|
ç |
÷ |
|
|
|
|
ècosaø |
|
||
If the number of jammers, M, are two or more, there are M 2 pairs (ai , bj ) (i, j = 1, …, M). To find correct DOA pairs
(ai , bi ) , we calculate the MUSIC spatial spectrum for all pos-
sible pairs and then select M pairs that give M largest values. This is based on the fact that, for a given ai , then the
magnitude of MUSIC spectrum of a correct pair will be largest among the possible pairs (ai , bj ) ( j = 1, …, M).
 Z
Z
a
 j b
j b





 Y r
Y r 
X
Figure 4. Estimation of azimuth and elevation angles from two 1D DOAs.
III.SIMULATION RESULTS
We compare the performance of DOA estimation for jammers by MUSIC and ESPRIT algorithms in GPS environments. We only represent the results of TLS-ESPRIT for ESPRIT algorithm because TLSand LS-ESPRIT reveal identical performance under the given simulation conditions. An L-shape array structure is used for the antenna. As a performance measure root mean square (RMS) error is used, which is obtained 100 computer simulation runs for a given parameter set. The covariance matrix of array outputs is estimated with 11,428 samples of observation interval (or snapshots), which corresponds to two periods of CA code or 2 ms at the L1 frequency band. For a jamming signal, single tone continuous wave (CW) with the center frequency in L1 band or additive white Gaussian noise (AWGN) is used. Only one GPS satellite located at azimuth of 315˚ and elevation of 80˚ is used with signal power level of 1/10 compared to noise.
Fig. 5 ~ 7 show the simulation results with CW jamming signal. Fig. 5 shows RMS errors of 2D DOA estimation of azimuth and elevation angles with 17-sensor array as a function of the number of jammers. The jammers are located at azimuth from 25˚ to 270˚ with 35˚ spacing and elevation of 0˚. Since the number of jammers is much less than that of
sensors, MUSIC reveals good estimation accuracy. However, the number of jammers can be detected is less than the number of sensors in 1D array in ESPRIT. Therefore, estimation accuracy of ESPRIT is worse than MUSIC for the number of jammers over 3.
Fig. 6 shows the RMS errors as a function of the number of sensors with one jammer located at azimuth of 25˚ and elevation of 0˚. With more than nine sensors, two methods reveal similar performance.
Fig. 7 Shows the performance of 9-sensor array as a function of the JNR with one jammer. At low JNR, the DOA estimation accuracy improves with JNR but it is maintained constant over -2 dB of JNR for both methods.
Fig. 8 ~ 10 show the simulation results with AWGN jamming signal. Fig. 8 shows RMS errors as a function of the number of jammers. The performance of MUSIC is better than ESPRIT. However, more than 4 jammers, we cannot distinguish the jammers with both algorithms. Compared to CW jammers, the estimation accuracy severely degrades for both MUSIC and ESPRIT algorithms.
Fig. 9 shows RMS errors as a function of the number of sensors with one jammer. In this case, the performance of ESPRIT is better than MUSIC method.
Fig. 10 shows RMS errors as a function of the JNR. The RMS trend is similar to the CW jammer case. However, the RMS values are larger than with CW jammers.
IV. CONCLUSIONS
In this paper, we compare the estimation performance of DOAs of jammers by MUSIC and ESPRIT algorithms with 2D array structure in GPS environments as a function of the number of jammers, the number of sensors and JNR. According to the simulation results, MUSIC algorithm shows slightly better performance compared to ESPRIT algorithm except for 5-sensor with one jammer case. For both algorithms, the RMS errors of azimuth are smaller than those of elevation. The reason is that the sensors are located in xy-plane. Simulation results also show that the effect of AWGN jammers is more severe than that of CW jammers. In real applications, since the number of jammers are very restricted, the ESPRIT method may be more recommendable for DOA estimation compared to the MUSIC method because of its extremely lower computational time.
REFERENCES
[1]M.G. Amin, Sun Wei, “A Novel Interference Suppression Scheme for Global Navigation Satellite Systems Using Antenna Array,” IEEE Journal on Selected Areas in Commu., vol. 23, no. 5, pp. 999 -1012, May 2005.
[2]M. Sahmoudi, M.G. Amin, “Unitary Cyclic MUSIC for Direction Finding in GPS Receivers,” IEEE Workshop on Sensor Array and Multichannel Processing 2006, pp. 70-73.
[3]T.B. Lavate, V,J, Kokate, A.M. Sapkal, “Performance Analysis of MUSIC and ESPRIT DOA Estimation Algorithms for Adaptive Array

Smart Antenna in Mobile Communication,” International Conference on Computer and Network Technology (ICCNT) 2010, pp. 308 – 311.
[4]R. O. Schmidt, “Multiple Emitter Location and Signal Parameter Estimation,” IEEE Trans. Antenna and Propagation, vol. 34, no.3, pp. 276-280, Mar. 1986.
[5]Richard Roy, Thomas Kailath, “ESPRIT – Estimation of Signal Parameters Via Rotational Invariance Techniques,” IEEE Trans. on Acoustics Speech and Signal Processing, vol. 37, no. 7, pp. 984-995, July 1989.
[6]Hamid Krim, Mats Viberg, “Two Decades of Array Signal Processing
Figure 5. RMS errors of DOA estimates versus the number of jammers for CW jammers.
Figure 6. RMS errors of DOA estimates versus the number of sensors (CW jammers).
Figure 7. RMS errors of DOA estimates versus JNR (CW jammers).
Research,” IEEE. Signal Processing magazine, vol.13, no.4, pp. 67-94, Apr. 1996.
[7]A. Paulraj, R. Roy, T. Kailath, “A Subspace Rotation Approach to Signal Parameter Estimation,” Proc. of The IEEE, vol. 74, no. 7, pp. 1044-1045, July 1986.
[8]Bjorn Ottersten, Mats Viberg, Thomas Kailath, “Performance Analysis of the Total Least Squares ESPRIT Algorithm,” IEEE Trans. on Signal Processing, vol. 39, no. 5, 1122 – 1135, 1991.
[9]Gene H. Golub, Charles F. Van Loan, Matrix Computations, The Johns Hopkins University Press, Third edition, 1996.
Figure 8. RMS errors of DOA estimates versus the number of jammers (AWGN jammers).
Figure 9. RMS errors of DOA estimates versus the number of sensors (AWGN jammers)
Figure 10. RMS errors of DOA estimates versus JNR (AWGN jammers)