

Расчет пусковых и тормозных сопротивлений
Масштаб сопротивлений:
![]() Ом/мм.
Ом/мм.
Добавочные сопротивления:
![]() Ом
Ом
![]() Ом
Ом
![]() Ом
Ом
![]() Ом
Ом
![]() Ом.
Ом.
Пусковое сопротивление:
![]() Ом.
Ом.
Пусковое сопротивление
![]() включается в цепь ротора для уменьшения
пускового тока. Ступени пускового
реостата служат для регулирования
скорости вращения двигателя.
включается в цепь ротора для уменьшения
пускового тока. Ступени пускового
реостата служат для регулирования
скорости вращения двигателя.
Тормозное сопротивление:
![]()
![]() Ом.
Ом.
![]() Ом.
Ом.
Номинальное скольжение при противовключении:
![]() Нм.
Нм.
![]()
Расчет переходных процессов
Основными задачами расчета являются: определение времени пуска и нахождение зависимостей скорости, тока и момента от времени.
По пусковой
диаграмме определяем
![]()
ω1=62,83ּ(1-0,67)=20,735 рад/с ω'1=62,83ּ(1-0,58)=26,389 рад/с
ω 2=62,83ּ(1-0,45)=34,558 рад/с ω'2=62,83ּ(1-0,40)=37,699 рад/с
ω 3=62,83ּ(1-0,30)=43,982 рад/с ω'3=62,83ּ(1-0,27)=45,867 рад/с
ω 4=62,83ּ(1-0,20)=50,265 рад/с ω'4=62,83ּ(1-0,18)=51,522 рад/с
ω 5=62,83ּ(1-0,13)=54,664 рад/с ω'5=62,83ּ(1-0,12)=55,292 рад/с
ω 6=62,83.(1-0,08)=57,81 рад/сω'6=62,83ּ(1-0,04)=60,319 рад/с.
Постоянная времени на каждой ступени:


Время переходного процесса на каждой ступени:
![]() ;
;

Зависимость М =f(t) строим по формуле:
![]() - где в качестве
Мначберется М1, а Мкон= Мст1
- где в качестве
Мначберется М1, а Мкон= Мст1
![]() .
.
Зависимость =f(t) строим по формуле:
![]() .
.
Таким образом, для i-й ступени имеем
![]() .
.
Зависимость I=f(t) строим по формуле:
![]() .
.
Значения токов в начале и конце каждой ступени:
 ,
,
где
 ;
; ;
;![]() .
.
1 ступень: sнач=1,sкон=0,58
![]() .
.
2 ступень: sнач=0,58,sкон=0,40
![]() .
.
3 ступень: sнач=0,40,sкон=0,27
![]() .
.
4 ступень: sнач=0,27,sкон=0,18
![]() .
.
5 ступень: sнач=0,18,sкон=0,12
![]() .
.
6 ступень: sнач=0,12,sкон=0,04
![]() .
.
Результаты расчетов токов в начале и конце каждой ступени сведены в таблицу:
|
|
I ст |
II ст |
IIIст |
IVст |
Vст |
VIст |
|
I2aнач, А |
1001 |
952 |
970 |
939 |
953 |
942 |
|
I2aкон, А |
651 |
760 |
770 |
727 |
743 |
405 |
|
I2нач, А |
1203 |
1107 |
1140 |
1084 |
1108 |
1090 |
|
I2кон, А |
782 |
821 |
835 |
778 |
799 |
412 |
|
cos2нач |
0,969 |
0,860 |
0,851 |
0,866 |
0,860 |
0,865 |
|
cos2кон |
0,993 |
0,993 |
0,993 |
0,994 |
0,992 |
0,999 |
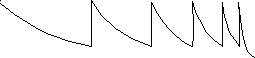
Результаты расчетов сводим в таблицу, по данным которой строим зависимости М=f(t),=f(t),I=f(t).
|
Тм, с |
t, с |
M, Нм |
, рад/с |
I2a |
|
0,06885 |
0 |
11281 |
0 |
992 |
|
0,02173 |
10377 |
7,143 |
939 | |
|
0,04347 |
9717 |
12,353 |
891 | |
|
0,0652 |
9236 |
16,153 |
850 | |
|
0,08694 |
8885 |
18,924 |
818 | |
|
0,10867 |
8629 |
20,945 |
792 | |
|
0,04749 |
0 |
11281 |
20,735 |
990 |
|
0,01499 |
10377 |
25,327 |
940 | |
|
0,02998 |
9717 |
28,676 |
894 | |
|
0,04497 |
9236 |
31,118 |
856 | |
|
0,05996 |
8885 |
32,900 |
824 | |
|
0,07495 |
8629 |
34,200 |
801 | |
|
0,03205 |
0 |
1128 |
34,558 |
988 |
|
0,01012 |
1038 |
37,619 |
938 | |
|
0,02024 |
9717 |
39,852 |
892 | |
|
0,03035 |
9236 |
41,480 |
854 | |
|
0,04047 |
8885 |
42,668 |
824 | |
|
0,05059 |
8629 |
43,534 |
800 | |
|
0,02137 |
0 |
11281 |
43,982 |
988 |
|
0,00675 |
10377 |
46,023 |
938 | |
|
0,01349 |
9717 |
47,512 |
892 | |
|
0,02024 |
9236 |
48,597 |
854 | |
|
0,02698 |
8885 |
49,389 |
824 | |
|
0,03373 |
8629 |
49,966 |
800 | |
|
0,01425 |
0 |
11281 |
50,265 |
988 |
|
0,00450 |
10377 |
51,626 |
938 | |
|
0,00899 |
9717 |
52,618 |
892 | |
|
0,01349 |
9236 |
53,342 |
854 | |
|
0,01799 |
8885 |
53,870 |
824 | |
|
0,02248 |
8629 |
54,255 |
800 | |
|
0,00475 |
0 |
11281 |
54,664 |
978 |
|
0,0038 |
9441 |
57,778 |
733 | |
|
0,0076 |
8614 |
59,177 |
566 | |
|
0,0114 |
8242 |
59,806 |
480 | |
|
0,0152 |
8075 |
60,088 |
438 | |
|
0,01899 |
8000 |
60,215 |
420 |
t,
c t,
c 10
0 0,02 I2a
,A 100
0 t,
c
0 M,
H. м 1000
Рисунок 5.
Характеристики переходных процессов. ,
рад/c
t1 t2 t3
t4
t5
t6













Выбор электрической схемы электропривода
Принимаем систему электропривода МКП – АДФ, крановый магнитный контроллер типа ТСА.