

Порядок виконання роботи:
1.Ознайомитися з інструкцією до виконання роботи, теоретичними матеріалами, підготувати звіт до фіксації результатів досліджень.
2.Підготувати робоче місце для виконання роботи, зібрати схеми досліджень (рисунок 1).
3.Отримавши дозвіл керівника робіт, включити живлення схеми досліджень.
4.Переміщуючи у відповідності з даними Таблиці 1 повзунок потенціометричного датчика лінійного переміщення (Х, см), фіксувати значення приладів - вольтметра PV1 та міліамперметра РА1.
Отримані дані досліджень внести в Таблицю 1 ,потім побудувати графічну характеристику Iп1=f( X).
Таблиця 1
Результати дослідження потенціометричного датчика лінійного переміщення
|
Х,см |
5 |
10 |
15 |
20 |
23 |
|
Uп1,В |
|
|
|
|
|
|
Iп1,мА |
|
|
|
|
|
Таблиця 2
Результати дослідження потенціометричного датчика кутового переміщення
|
L,град |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
|
Uп2,В |
|
|
|
|
|
|
|
|
|
Iп2,мкА |
|
|
|
|
|
|
|
|
Графічні характеристики потенціометричних датчиків: а)Iп1=f(X) для лінійного переміщення; б)Iп2=f( L) для кутового переміщення.
5.Переміщуючи у відповідності з даними Таблиці 2 повзунок потенціометричного датчика кутового переміщення(L, град),фіксувати значення приладів-вольтметра РV2 та міліамперметра РА2.Отримані дані досліджень внести в Таблицю 2,потім побудувати графічну характеристику Iп2=f( L).
6.Закінчивши виконання роботи повернути всі органи керування та робочі механізми.
Підготуйтеся до захисту звіту з лабораторної роботи. Дайте відповіді на контрольні питання.
Контрольні питання:
1.Які датчики називають потенціометричними ?
2.Назвіть основні параметри, що характеризують потенціометричні датчики.
3.Назвіть переваги та недоліки потенціометричних датчиків.
4.Що є вхідною величиною потенціометричного датчика?
5.Що називають зоною нечуттєвості дротяних датчиків та чим вона визначається?
6.З якою метою стабілізують напругу живлення потенціометричних датчиків?
Література: [ 2 ] , c 97…100, [ 3 ] , c 57…59
Завдання на самостійну роботу: зробити необхідні розрахунки, оформити звіт, вивчити теорію з літературних джерел.
Лабораторна робота № 3 Дослідження індуктивних датчиків
Мета роботи: отримати навички в дослідженні, розрахунку та виборі індуктивних датчиків з рухомим осердям, з рухомим якорем та з поворотним якорем.
Прилади та обладнання:
1.Індуктивний датчик з рухомим осердям простішого типу.
2.Диференційний індуктивний датчик з рухомим осердям.
3.Вольтметри ~ 150 В, ~ 300 В.
4.Міліамперметри ~ 300 мА (3 шт.).
5.Міліамперметр ~ 60 мА.
6.Універсальний лабораторний стенд з джерелами напруг змінного струму 127В, 0-220В промислової частоти 50Гц.
7.З’єднувальні провідники.
Основні теоретичні положення:
Принцип дії індуктивних датчиків базується на зміні індуктивності або взаємоіндуктивності котушки з магнітопроводом при ппереміщенні якоря.
Індуктивні датчики (рис.1) класифікують на датчики з рухомим якорем, рухомим сердечником, поворотним якорем та магнітопружнього типу.
Індуктивні датчики в основному використовують для вимірювання кутових та лінійних переміщень, а також сили тиску. Вони прості , відносно надійні, безконтактні, у них порівняно велика вихідна потужність, працюють вони на змінному струмові частотою від 50Гц до 5кГц (на частотах менше 50Гц зменшується доля індуктивного опору датчика, а на частотах більше 5кГц зростають втрати на перемагнічування та зростає індуктивний опір датчика).
Для індуктивного датчика з рухомим якорем (рис.1,а) вхідним сигналом δ є переміщення якоря відносно середнього положення, а вихідним - напруга Uвих . Нехтуючи магнітним опором сталевого осердя та активним опором котушки, можна вважати, що струм , протікаючий в обмотках, пропорційний значенню повітряного зазору:
I = kδ,
де: k=U10/(0,2·π·ω·W·S)- коефіцієнт; δ – значення повітряного зазору; U – напруга, прикладена до обмотки; ω – кутова частота, пропорційна лінійній частоті напруги живлення f (ω=2·π·f); W – число витків обмотки; S - переріз сталевого сердечника.
Індуктивні датчики з рухомим якорем забезпечують вимірювання механічних лінійних переміщень в межах від декількох мікрометрів до декількох міліметрів.
Для вимірювання великих переміщень використовують індуктивні датчики з рухомим сердечником (рис.1,б).
Індуктивні датчики з поворотним якорем (рис.1,в) використовують для вимі рювання кутових переміщень, а індуктивні датчики магнітопружнього типу – для визначення сили тиску (рис.1,г).
|
|
|
|
|
|



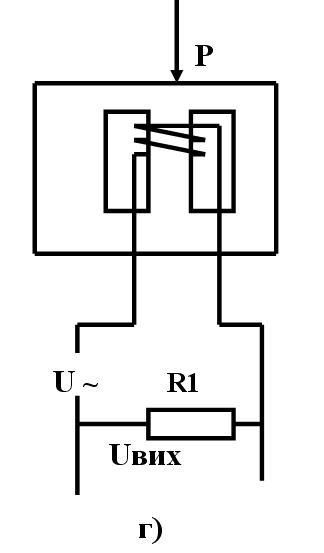
Рис.1. Схеми індуктивних датчиків: а) з рухомим якорем; б) з рухомим сердечником; в) з поворотним якорем; г) магнітопружнього типу.
Залежність між вихідною та вхідною величинами датчика у статичному режимі називають статичною характеристикою датчика. Статична характеристика індуктивного датчика простого типу представлена на рис.2,а. Лінійність характеристики індуктивного датчика простого типу зберігається у межах деякої зони (А-В-С) і порушується, коли активний опір котушки r стає рівним з індуктивним опором XL. Нелінійність при малих повітряних зазорах зумовлена споживанням струму на покриття втрат у активному опорі котушки та у сталі.
Робочу точку індуктивного датчика вибирають на середині прямолінійної частини АС характеристики (точка В, рис.2,а). Цій точці відповідає початковий струм Iпо та початковий повітряний зазор δво.
Загальний недолік індуктивних датчиків - залежність точності вимірювань від стабільності частоти напруги живлення.