

Лабораторная работа № 3.
Метод фазовой плоскости синтеза оптимальной по быстродействию системы
Цель работы: изучение свойств оптимальной по быстродействию системы, синтезированной на основе синтеза фазовой плоскости.
3.1. Теоретические сведения
Пусть задана вполне управляемая линейная стационарная система
|
|
u |
|
≤1, x R |
n |
, u R , |
|
|
|||||
x = Ax + Bu , |
|
|
|
все корни характеристического уравнения которого действительны. Заметим, что ограничения более общего вида α ≤u ≤ β , где α <0 и β >0 , введением нового переменного v = 2u −(α + β) /(α − β) всегда приводится к приведенному выше виду u ≤1. Рассмотрим задачу синтеза оптимального по быстродействию
регулятора, обеспечивающего перевод системы из произвольной начальной точки в начало координат.
Так как управление скалярное, условие нормальности совпадает с условием управляемости, поэтому выполняются все условия теоремы об n интервалах. В соответствии с этой теоремой оптимальное управление, имея не более n интервалов постоянства, принимает только крайние значения: –1 или 1. Если представить его как функцию фазовых координат u* = u*(х), то ясно, что все фазовое пространство разбивается на два подпространства: подпространство, в котором u* = –1, и подпространство, в котором u* = 1. Гиперповерхность (при n = 2 – кривая, при n = 3 – поверхность), которая делит фазовое пространство на указанные подпространства, называют гиперповерхностью (кривой, поверхностью) переключения. Если записать уравнение гиперповерхности δ(x) =0, то, как известно, δ(x) >0 по одну
сторону от гиперповерхности и δ(x) <0 по другую. Всегда (при необходимости умножением на –1) можно выбрать функцию δ(x) так, чтобы она была
1
отрицательна в подпространстве, где u* = –1, и положительна в подпространстве, где u* = 1. Тогда, очевидно, оптимальным управлением будет u* =signδ(x). Поэтому нахождение оптимального управления с обратной
связью сводится к определению функции δ(x) , которая называется функцией переключения.
При n = 2 для нахождения функции переключения можно воспользоваться методом фазовой плоскости. На фазовой плоскости строятся семейства фазовых траекторий, соответствующих управлениям u* = –1 и u* = 1. Оптимальная траектория представляет собой часть траектории или соединение частей двух траекторий из построенных семейств. В силу граничного условия на правом конце траектории x(t f ) =0 она должна оканчиваться в начале координат.
Используя эти свойства оптимальных траекторий, нетрудно определить кривую переключения. Проиллюстрируем изложенное на простейшем примере.
Пример 3.1. Определить оптимальный по быстродействию закон управления двигателем, описываемым уравнениями
|
, |
|
=u , |
|
u |
|
≤1, |
x(0) = x |
0 |
, x(t f ) =0 |
|
|
|||||||||
x = x2 |
x2 |
|
|
|
Решение. Характеристическое уравнение имеет кратный нулевой корень. Выполняются все условия теоремы об n интервалах. Оптимальное управление может принимать значения –1 или 1. Найдем соответствующие им фазовые траектории. Разделив второе уравнение на первое, получим
dx2 |
= |
u |
, или x |
2 |
dx |
2 |
=udx . |
|
|||||||
dx1 |
|
x2 |
|
1 |
|||
|
|
|
|
|
|||
Проинтегрировав последнее уравнение при u = –1 и u = 1, соответственно находим
1 x2 |
= −x +C , |
1 x2 |
= x +C |
|
. |
|||
2 |
2 |
1 |
1 |
2 |
2 |
1 |
2 |
|
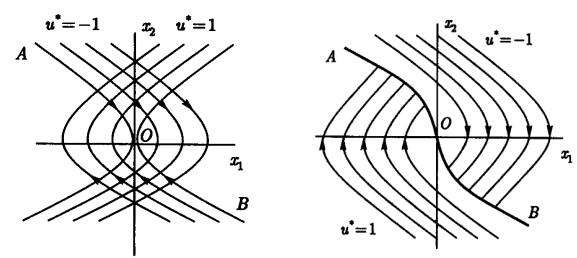
На рис. 3.1, а представлены оба семейства траекторий. Оптимальная траектория должна состоять из участка траектории одного семейства, проходящей через начальную точку, и участка траектории другого семейства,
2
проходящей через начало координат. Из сказанного следует, что переключение должно происходить на полутраекториях АО и ОВ (рис. 3.1, а). Если вначале изображающая точка движется по траектории, соответствующей u* = –1, то переключение должно произойти на полутраектории ВО, которая описывается уравнением
x22 − 2x1 =0 .
И если вначале изображающая точка движется по траектории, соответствующей u* = 1, то переключение должно произойти на полутраектории ОА, которая описывается уравнением
x22 + 2x1 =0 .
Фазовый портрет оптимальной системы представлен на рис. 3.1,б. Уравнение линии переключения АОВ, основываясь на уравнениях полутраекторий АО и OB, можно записать так:
δ(x) = −(x22 + 2x1sign x2 )sign x2 =0.
Функция δ(x) отрицательна справа от линии переключения, где u* = –1, и положительна слева, где u* = 1. Поэтому имеем
u* =sign δ(x) =sign[(x22 + 2x1 sign x2 )sign x2 ].
Заметим, что кривая АОВ может быть описана уравнением
δ~(x) = −(x22 + 2x1 sign x2 ) =0 .
Однако знак функции δ~(x) слева и справа от кривой АОВ меняемся при
переходе с верхней полуплоскости в нижнюю полуплоскость. Поэтому эта функция не может быть функцией переключения.
3
a) |
б) |
Рис. 3.1. Фазовые траектории.
Как следует из фазового портрета, переходный процесс оптимальной системы является апериодическим. Однако из-за неидеальности переключающего устройства, неточности математической модели объекта и других возмущений реальный переходный процесс может оказаться колебательным.
3.2.Порядок выполнения работы
3.2.1Определить оптимальное управление с обратной связью u* (х) в задаче максимального быстродействия при условиях, что в начальный момент х(0) = х0 (х0 – произвольный вектор), в конечный момент x(tf) = 0. В ходе решения задачи определить количество интервалов постоянства.
3.2.2Собрать схему оптимальной по быстродействию системы
управления.
3.2.3Построить графики переходных процессов по переменным состояния и управляющему воздействию и фазовый портрет системы.
3.2.4По графику x1(t) определить время переходного процесса.
4