

TAU_OsipovaEA
.pdfсистемы управления называются следящими. Основное требование к такой системе –
минимум погрешности х t :
х t t y t .
Более сложными являются задачи самонастройки (адаптации) системы на оптимум какого-либо из показателей качества функционирования объекта или системы, а именно, обеспечение оптимального в заданном смысле режима работы объекта при изменении внутренних и внешних условий.
Так, например, если требуется поддержать экстремальное значение управляемой величины на объект могут подаваться пробные воздействия со стороны управления u , после чего на основе анализа знака изменения управляемой величины вырабатывается управляющее воздействие u t , приближающее режим к точке экстремума (рис. 4).
Рис. 4 – Экстремальное автоматическое управление
В задачах управления по условию максимального быстродействия системы показателем экстремума является время, в течение которого система отрабатывает изменения задающего воздействия.
Это время может анализироваться специальным устройством самонастройки, вырабатывающим команды M на изменение параметров регулятора так, чтобы время регулирования стало минимальным (рис. 5). В устройство самонастройки вводится информация о текущем значении регулируемого параметра y t и информация R о
результатах пробных изменений на регулятор. На основании этих величин управляющее воздействие M , обеспечивающее требуемое изменение параметров регулятора. Следовательно, данная система может быть представлена в виде двух систем, одна из которых управляет другой.
Рис. 5 – САУ с максимальным быстродействием
Тема 1.4. Классификация систем автоматического управления
САУ можно классифицировать по различным признакам: цели управления; принципу управления, характеру сигналов, математическому описанию, виду используемой энергии и т.д.
По принципу управления САУ подразделяются на четыре класса: системы, работающие по разомкнутому, замкнутому, комбинированному циклам и самонастраивающиеся системы.
Системы, работающие по разомкнутому циклу, подразделяются на системы компенсации действия возмущений и разомкнутые системы программного регулирования.
САУ, работающие по замкнутому циклу, делят на системы автоматической стабилизации, системы программного регулирования и следящие системы.
Системы, в которых используется регулирование как по отклонению, так и по возмущению (работающие по комбинированному циклу), делятся на две группы: системы автоматической стабилизации и следящие системы.
Классификацию самонастраивающиеся систем проведем по цели управления. В этом случае они делятся на две группы: системы стабилизации показателя качества работы; системы управления, задачей которых является отыскание и поддержание экстремального значения показателя качества (экстремальные системы).
По характеру сигналов системы управления делят на непрерывные, дискретные. Входные и выходные сигналы непрерывных систем являются аналоговыми и
описываются функциями непрерывного времени t , т. е. независимая переменная t для всех сигналов системы принимает непрерывную последовательность значений (рис. 1).
Если САУ содержит, по крайней мере, один элемент, выходной сигнал которого определяется последовательностью выделенных значений y1, y2 , ..., yn его входного сигнала и
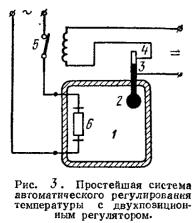
эта последовательность в общем случае бесконечна, то такую систему называют дискретной. Процедура представление непрерывного сигнала его дискретными значениями
называется квантованием по уровню и/или по времени непрерывного сигнала в дискретный.
Квантование по уровню соответствует фиксации дискретных уровней сигнала в произвольные моменты времени (рис. 2, а); квантование по времени соответствует фиксации дискретных моментов времени, при которых уровни сигнала могут принимать произвольные значения (рис. 2, б). При одновременном квантовании по времени и по уровню (рис. 2, в) непрерывный сигнал заменяется дискретными уровнями, ближайшими к значениям непрерывного сигнала в дискретные моменты времени.
В настоящее время существует общепринятая классификация дискретных систем по используемым в них видам квантования, согласно которым они подразделяются на релейные, импульсные и релейно-импульсные (цифровые).
Системы с квантованием по уровню называются релейными системами. В таких системах хотя бы у одного звена выходная координата изменяется скачком всякий раз,
когда непрерывная входная координата достигает некоторых заранее фиксированных значений, называемых пороговыми. Такое звено называется релейным звеном.
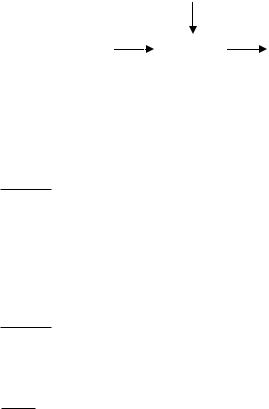
Пример. Система автоматического регулирования температуры. Простейшим видом регулятора температуры является так называемый двухпозиционный регулятор. Принципиальная схема его приведена на рис. 3. Назначение регулятора состоит в поддержании постоянства температуры электрической печи (термостата). Температура печи 1 измеряется ртутным термометром 2, в который впаяны два контакта 3 и 4. При повышении температуры столбик ртути, замыкая эти контакты, тем самым замыкает цепь реле 5, которое, срабатывая, отключает электрический нагреватель 6. Благодаря этому температура начнет понижаться. Столбик ртути размыкает контакты 3 и 4 и, следовательно, цепь реле 5 размыкается. Благодаря этому подключается к сети электронагреватель 6, и температура начинает повышаться. Это процесс непрерывно повторяется.
Системы регулирования называются импульсными, если хотя бы один из сигналов, характеризующих состояние системы, квантуется по времени. Квантование по времени и модуляция осуществляются импульсным элементом (ИЭ). Входным сигналом такого элемента является непрерывный сигнал, а выходным - модулированная последовательность импульсов. При этом под модуляцией понимается изменение тех или иных параметров импульсов в зависимости от выделенных в процессе квантования дискрет.
Пример. Импульсные системы широко распространены в разнообразных областях техники. В радиосвязи и телевидении используются импульсные способы передачи; в радиолокации и радиотелеуправлении применяются импульсные методы измерения координат подвижных объектов и управления ими; в технике автоматического регулирования применяется принцип импульсного регулирования; в многоточечном или многоканальном регулировании применяются импульсные способы передачи сигналов измерения и управления.
Система регулирования называется релейно-импульсной (цифровой), если она содержит цифровое устройство. В цифровом устройстве всегда имеет место квантование и по времени, и по уровню. Цифровые системы управления применяются во многих областях - при управлении металлорежущими станками, в металлургии, в химических процессах, при управлении самолетами и движением автомобиля и т.д. Возможность автоматизировать многие производственные процессы появилась благодаря наличию компьютеров на быстродействующих, недорогих и миниатюрных микропроцессорах, которые стали включать непосредственно в контур системы управления.
По виду дифференциальных уравнений, описывающих поведение системы в динамике (по математическому описанию) все системы делят на линейные и нелинейные.
По виду используемой энергии все виды делят на электрические, пневматические, гидравлические, электропневманические, электрогидравлические и т.д.
Системы, в которых чувствительный элемент регулятора воздействует непосредственно на регулирующий орган, называются системами прямого управления. В системах непрямого управления после чувствительного элемента устанавливаются усилители мощности и серводвигатели, воздействующие на регулирующие органы, в результате чего качество процессов регулирования повышается.
В зависимости от числа регулируемых величин САУ делят на одномерные (одна регулируемая величина), двухмерные (две регулируемая величина) и многомерные ( n регулируемых величин). Многомерные системы могут быть системами связанного и несвязанного регулирования. В системах несвязанного регулирования регуляторы, управляющие различными переменными, не связаны между собой и работают независимо. В системах связанного регулирования регуляторы связаны между собой и нормальная работа системы требует вполне определенного их взаимодействия.
Раздел 2. Линейные модели систем управления и их характеристики Тема 2.1. Понятие о линейных системах
Линейными называются системы управления, которые и в статике и в динамике описываются линейными уравнениями. Одна из основных особенностей линейных систем заключается в том, что к ним применим принцип суперпозиции, в соответствии с которым реакция системы на совокупность возмущений определяется суммой реакций на каждое возмущение, прикладываемое к системе в рассматриваемый момент времени.
Тема 2.2. Динамические звенья и их характеристики
Под динамическим звеном понимают устройство любой физической природы и конструктивного оформления, но описываемое определенным дифференциальным уравнением.
|
|
g(t) |
|
xвх(t) |
|
|
xвых(t) |
W(p) |
|
||
|
|
|
|
|
|
|
|
При нулевых начальных условиях, то есть в том случае, если для t<0 входная и выходная величины, а также их производные тождественно равны нулю, и при отсутствии внешнего возмущения может быть найдена передаточная функция как отношение изображений по Лапласу выходной и входной величин:
W p X вых p .
X вх p
Аналогичным образом может быть найдена передаточная функция звена по возмущению, если положить при нулевых начальных условиях входное воздействие равным нулю. Тогда искомая передаточная функция будет равна отношению изображений выходной величины и внешнего возмущения:
W p Хвых p
G p
Представим передаточную функцию в виде отношении двух полиномов:
W p K p . D p
Приравняв полином знаменателя передаточной функции к нулю, получим характеристическое уравнение системы:
D p 0 .
Корни уравнения D p 0 называются полюсами передаточной функции.
Корни уравнения K p 0 называются нулями передаточной функции.
О частотной передаточной функции известно следующее:
1.она является динамической характеристикой и отражает способность системы воспроизводить в установившемся (вынужденном) режиме гармонические входные
воздействия. Теоретически при подаче на вход устойчивой линейной системе гармонических колебаний определенной частоты на выходе системы - после затухания свободных колебаний – устанавливаются гармонические колебания той же частоты , но иной амплитуды и фазы. Частотная передаточная функция показывает различия амплитуд
ифаз входного и выходного сигналов системы в уст. режиме на различных частотах.
2.частотную передаточную функцию можно получить из передаточной функции
p заменой p на j и трактовать её как отношение
X вх p
преобразования Фурье выходной координаты к преобразованию Фурье входного
воздействия, т.е. W j X вых jω ;
X вх jω
3. Пусть гармонические колебания описываются синусоидой, тогда, зная формулу Эйлера e jx cos x j sin x , запишем
xвх t Aвх sin t вх Aвх Ime j t вх ;
xвыхуст t Aвых sin t вых AвыхIme j t вых .
Тогда ясно, что частотную передаточную функцию можно представить в виде |
||||||||
W j |
Aвых |
e j вых вх |
|
W j |
|
e j argW j A e j |
. В силу изложенного |
|
|
|
|||||||
|
||||||||
|
A |
|
|
|
|
|
||
|
|
|
|
|||||
|
вх |
|
||||||
частотная функция называется АФЧХ.
Модуль частотной передаточной функции A (АЧХ) представляет собой
отношение амплитуды выходного сигнала к амплитуде входного в вынужденном (установившемся) режиме на различных частотах:
A Aвых W j .
Aвх
Аргумент частотной передаточной функции (ФЧХ) представляет собой сдвиг
по фазе выходного сигнала по отношению к входному в вынужденном (установившемся) режиме на различных частотах.
argW j .
4. Соотношения для определения амплитудных и фазовых характеристик. Учитывая, что W j ReW j j ImW j ,
A 
 ReW j 2 ImW j 2 ;
ReW j 2 ImW j 2 ;

arctg ImW j 0 при ReW j 0 . ReW j при ReW j 0
Временные характеристики
Динамические свойства звена могут быть определены по его переходной функции и функции веса.
Переходная функция, или переходная характеристика, h t описывает переходный
процесс на выходе звена, возникающий при подаче на его вход скачкообразного воздействия при величине скачка, равной единице (рис. 1). Такое входное воздействие называется единичной
ступенчатой функцией и обозначается xвх t 1 t , что соответствует
0, при t 0; 1 t
1, при t 0.
Предполагается, что единица имеет ту же размерность, что и физическая величина на входе
звена.
Рис. 1 Если входное воздействие представляет собой неединичную ступенчатую функцию
xвх t N 1 t , выходная величина линейного звена будет равна xвых t N h t .
Ступенчатая функция представляет собой распространенный вид входного воздействия в автоматических системах. К такому виду сводятся мгновенное изменение нагрузки электрического генератора, мгновенное возрастание нагрузки на валу двигателя и т.п.
Умножение какой-либо функции времени x t на единичную ступенчатую функцию 1 t означает, что функция времени x t будет существовать только при t 0 , а при t 0 она обращается в нуль.
Функция веса t представляет собой реакцию звена на единичную импульсную функцию, поданную на его вход (рис. 2).

Рис. 2 Единичная импульсная функция или дельта-функция представляет собой
производную от единичной ступенчатой функции: t 1 t . Дельта функция тождественно равна нулю повсюду, кроме точки t 0, где она равна бесконечности.
Основное свойство дельта-функции заключается в том, что
t dt 1,
то есть она имеет единичную площадь.
Нетрудно установить связь между переходной функцией и функцией веса. Рассмотрим входное воздействие звена в виде конечного по высоте и ширине импульса с площадью N 1,
прикладываемого при |
t 0 (рис. 3). Такой импульс может быть заменен двумя ступенчатыми |
функциями N 1 t |
и N 1 t , прикладываемыми ко входу звена. Тогда выходная |
величина линейного звена будет равна xвых t N h t h t .
Рис. 3
Будем теперь увеличивать высоту импульса N , одновременно уменьшая его ширину , но так, чтобы все время площадь импульса равнялась единице, то есть N 1. Помножив и поделив правую часть последнего равенства на и перейдя к пределу, получи функцию веса
t lim |
N h t h t |
|
dh t |
. |
|
|
|
|
|||
0 |
|
dt |
|||
Таким образом, функция веса может быть получена дифференцированием по времени переходной функции.
В случае, если на вход линейного звена поступает неединичная импульсная функция xвх t G t , то на выходе звена получится xвых t G t .

Импульсная функция также представляет собой распространенный вид входного воздействия в автоматических системах. К такому виду можно свести, например, кратковременный удар нагрузки на валу двигателя, кратковременный ток короткого замыкания генератора, отключаемый плавкими предохранителями и т.п. в действительности реальные импульсные воздействия на автоматическую систему всегда будут конечными по величине и продолжительности. Однако в случае если их продолжительность весьма мала по сравнению со временем переходного процесса звена или автоматической системы, то с большой степенью точности реальный импульс может быть заменен дельта-функцией с некоторым масштабируемым коэффициентом, что позволяет оценить переходный процесс по виду функции веса.
Функция веса звена связана с его передаточной функцией преобразованием Лапласа, а именно: передаточная функция есть изображение функции веса и связана с ней интегральным преобразованием
W p t e ptdt.
0
Логарифмические частотные характеристики
Расчёт САУ с помощью частотных методов упрощается, если пользоваться амплитудной и фазовой характеристиками, построенными в логарифмическом масштабе.
Логарифмическая амплитудная частотная характеристика (ЛАЧХ) строится в виде |
||
зависимости 20 lg A от |
lg , а логарифмическая фазовая частотная характеристика |
|
(ЛФЧХ) – в виде зависимости от |
lg . |
|
Величина 20 lg A |
обозначается L и измеряется в децибелах (деци – |
|
множитель 10 1 ). Бел – это единица измерения коэффициента усиления сигнала по мощности, выражающаяся в десятичных логарифмах, т.е. 1 бел соответствует усилению
мощности в 10 |
раз, а 2 бела |
- в 100 раз и т.д. А так как мощность N сигнала |
||||||
пропорциональна квадрату его амплитуды |
A , |
то усиление в децибелах по мощности |
||||||
можно выразить соответственно через логарифм отношения амплитуд |
||||||||
10 lg N |
2 |
N |
1 |
10 lg A2 |
A2 20 lg A A |
. |
||
|
|
2 |
1 |
2 |
1 |
|
||
При этом надо иметь в виду, что логарифм модуля частотной передаточной функции имеет смысл, если входной и выходной сигналы имеют одинаковую размерность.
Для ЛАЧХ величина L в дБ откладывается по оси ординат: для ЛФЧХ по оси
ординат откладывается фаза в градусах, вверх – положительные, а вниз – отрицательные значения. По оси абсцисс для обеих характеристик откладывают значения логарифма частоты lg , а также значения частоты в рад с . Относительно величины lg шкалы по
с . Относительно величины lg шкалы по
оси абсцисс является равномерной, а относительно величины - неравномерной, логарифмической.
Применяется также деление шкалы частот на октавы и на декады. Если отношение частот равно двум, то частоты отличаются друг от друга на октаву, если оно равно десяти
– на декаду. Длина отрезка, представляющего собой октаву или декаду, остается постоянной и не зависит от частоты, выбранной для начала отрезка, причём одна декада приблизительно равна 3,03 октавы. Логарифмическая шкала по оси абсцисс не имеет
точки для значения 0 (можно считать, что |
точка |
0 лежит на оси частот слева в |
|
бесконечности, т.к. lg0 ). Положение |
оси |
ординат на графиках L |
и |
выбирается по оси частот в любой удобной точке. Обычно её проводят так, чтобы справа от нее можно было бы простроить существенную часть ЛАЧХ и ЛФЧХ.
Для решения практических задач бывает достаточно простроить приближённые ЛАЧХ, которые представляются в виде отрезков прямых, стыкующихся на частотах
сопряжения сопр . Такие ЛАЧХ L называются асимптотическими, т.к. они состоят из отрезков асимптот для составляющих точных ЛАХ L .
Наклон L обычно выражается отношениями дБ окт или дБ
окт или дБ дек . Например,
дек . Например,
если A 1 , то при изменении частоты на октаву L 2 L 20 lg 2 6 |
дБ |
, а |
||||||||||||||
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
окт |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
при изменении частоты на декаду L 10 L 20 lg 10 20 |
дБ |
. |
|
|
|
|||||||||||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
1 |
1 |
|
|
дек |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
В области высоких |
частот этот наклон характеризует |
разность |
степеней |
n m |
|||||||||||
знаменателя |
и |
числителя |
передаточной |
функции |
W p . При |
n m q |
наклон |
будет |
||||||||
6 q |
дБ |
или |
20q |
дБ |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
окт |
|
|
дек |
|
|
|
|
|
|
|
|
|
|
|
|
|
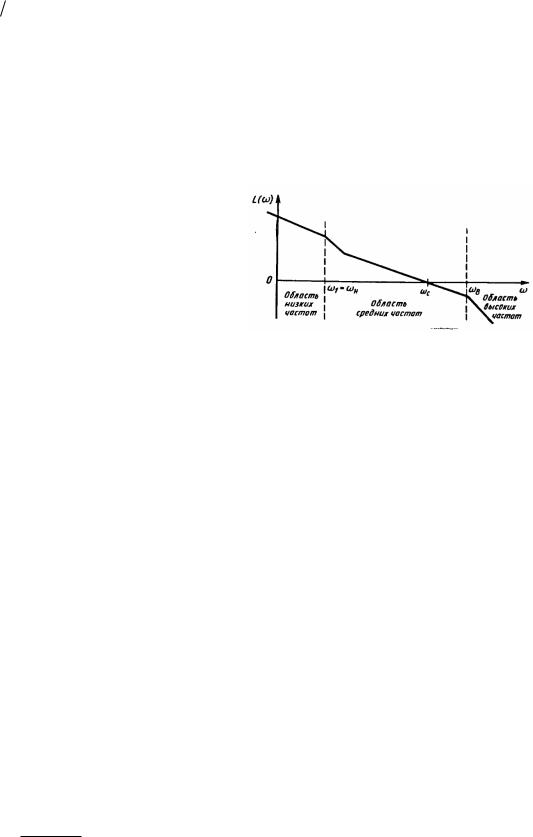
ЛАЧХ САУ может быть разбита на следующие три характерных участка (рис. 4). |
|||||||||||||||
|
1. Область низких частот. Этот участок |
|
|
|
|
|
|
|
||||||||
находится в области частот, меньших первой |
|
|
|
|
|
|
|
|||||||||
сопрягающей частоты. Вид ЛАЧХ здесь |
|
|
|
|
|
|
|
|||||||||
определяет порядок астатизма и статическую |
|
|
|
|
|
|
|
|||||||||
точность системы. Для статических систем |
|
|
|
|
|
|
|
|||||||||
ЛАЧХ представляет горизонтальную прямую, |
|
|
|
|
|
|
|
|||||||||
отстоящую от |
оси частот на 20 lg k , |
для |
|
|
|
|
|
|
|
|||||||
астатических |
|
систем |
1-го |
порядка |
Рис. 4 - Области низких, средних и |
|||||||||||
характеристика |
имеет |
наклон 20дБ / дек . |
||||||||||||||
При |
частоте |
1 |
эта |
прямая |
или |
ее |
высоких частот ЛАЧХ САУ |
|
|
|||||||
продолжение должна иметь ординату 20 lg k .
Если система имеет астатизм -порядка, то наклон прямой должен быть 20 дБ / дек .
2. Область средних частот. Вид ЛАЧХ в этой области определяет в основном запас устойчивости и качество САУ. В этом интервале находится частота среза системы ср ,
характеризующая время переходного процесса при достаточных запасах устойчивости. Область средних частот заканчивается частотой в .
3. Область высоких частот в . этот участок может быть назван интервалом
малых параметров. Он содержит сопрягающие частоты, пренебрежение которыми не оказывает существенного влияния на вид логарифмической характеристики в интервале средних частот, то есть на динамику системы.
Тема 2.3. Типовые динамические звенья
Пропорциональное (усилительное) звено
Пропорциональным называется звено, поведение которого описывает алгебраическое уравнение
xвых kxвх ,
где k - коэффициент усиления.
Примерами таких звеньев могут служить безынерционные усилители, механические редукторы и многие датчики сигналов и т.д.
Передаточная функция звена следующая:
W p X вых p k.
X вх p
1 t ) имеет вид
h t k1 t .
Импульсная переходная функция пропорционального звена определяется
выражением
t k t .
Заменив в передаточной функции p на j ,
получим выражения для частотных характеристик. Амплитудно-фазовая характеристика представляет собой точку на комплексной плоскости в
соответствии с формулой
W j k.
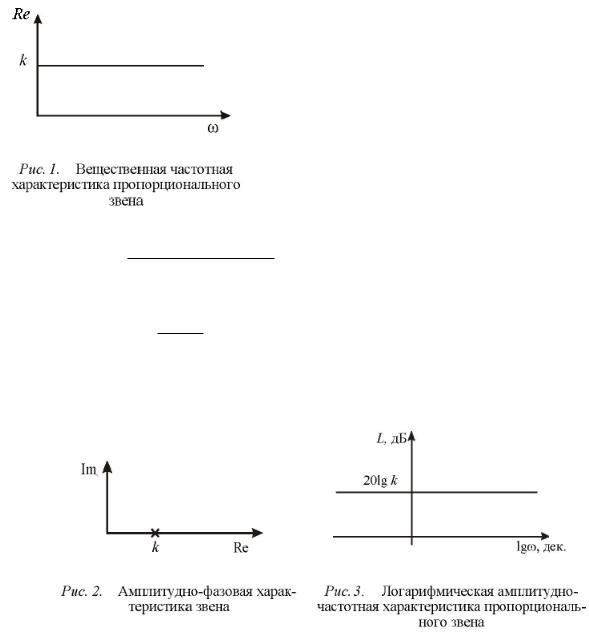
Вещественная частотная характеристика
определяется соотношением (рис.1)
Re k,
а мнимая частотная характеристика отсутствует
( Im 0 ).
Амплитудная частотная характеристика может быть построена по соотношению
A 
 Re 2 Im 2 Re k .
Re 2 Im 2 Re k .
Выражение для ФЧХ следующее:
arctg Im 0 при Re 0 0 . Re при Re 0
Таким образом, при прохождении через пропорциональное звено амплитуда периодического входного сигнала изменяется в k раз, а фазовый сдвиг отсутствует.
АФЧХ звена имеет вид точки на комплексной плоскости (рис.2).
Логарифмическая АЧХ звена представляет собой прямую, параллельную оси абсцисс:
L 20 lg A 20 lg k.
Следовательно, пропорциональное звено пропускает входные сигналы без искажений.
Дифференцирующее звено
Дифференцирующим называется звено, которое описывается дифференциальным уравнением