

Измерительные приборы и системы, используемые при проведении научных исследований
ТЕМА 5. Изучаемые вопросы: Измерительные приборы и системы, используемые при проведении научных исследований; Оборудование для измерения параметров; Датчики (первичные преобразователи); Измерение сил с помощью тензорезисторного моста; Тарировка измерительных систем; Абсолютная и относительная погрешность измерения.
Для выполнения экспериментальных исследований чаще всего необходимо, чтобы объект исследования функционировал в заданных условиях, и на заданных режимах работы, именно в тех условиях, и на тех режимах, которые в наибольшей степени интересуют исследователя. Для этого, в зависимости от цели исследования, объект исследования подвергают экспериментальным исследованиям:
- либо в условиях его эксплуатации;
- либо полигонным испытаниям (на специализированных полигонах);
- либо стендовым испытаниям (в лабораториях, на специальных стендах).
В каждом из перечисленных видов экспериментальных исследований используется специальное оборудование. В первых двух случаях, как правило, ставится задача:
а) измерения (регистрации) контролируемых параметров;
б) их обработка (усиление, масштабирование и т.п.);
в) визуализация (отображение результатов измерения на экране, дисплее);
г) хранение полученной информации.
Измерение (регистрация) контролируемых параметров осуществляется при помощи специальных измерительных датчиков (первичных преобразователей). Обычно датчики преобразуют измеряемые физические параметры в электрические сигналы (например: давление жидкости – в электрический ток; или температуру – в электрическое напряжение; или перемещение – в сопротивление и т.п.). Это делается для удобства обработки и регистрации измеряемых параметров, а также для передачи сигналов датчиков на заданные расстояния (Например, от объекта исследования, до исследователя).
В качестве примера, на рис. 14 показаны некоторые типы первичных преобразователей.
После первичного преобразования, сигналы от датчиков усиливают, пропуская их через специальные электронные усилители.
|
а) |
б) |
|
в) |
г) |




Рис. 14 Внешний вид датчиков (первичных преобразователей): а) – тензометрические датчики (преобразуют напряжение в металлах, в изменение сопротивления); б) датчик «Оптопара» (преобразует угол (скорость) поворота вала, диска, в прямоугольные электрические импульсы); в) индуктивный датчик (преобразует частоту вращения в эквивалентную последовательность электрических сигналов); г) силоизмерительный датчик (преобразует силу, в изменение сопротивления).
После усиления сигналы поступают на приборы или регистрирующие системы. В качестве приборов могут использоваться аналоговые и цифровые вольтметры, амперметры, омметры. Регистрирующими системами являются компьютеры, осциллографы и т.п.
Измерение сил с помощью тензорезисторного моста
Практическое измерение силы Fсводится к измерению деформации тензометрического датчика, с использованием формулы:
σ = ε Е (2.1)
где ε – деформация датчика в результате действия силы F;
Е - модуль упругости первого рода.
Для измерения сил используют тензометрические преобразователи (тензодатчики). Тензодатчики (рис. 15) представляют собой фольгу 1 из специального сплава (константанового) наклеенную на специальную изолирующую подложку 2. К концам константановой фольги 1 припаяны соединительные проводники 3.
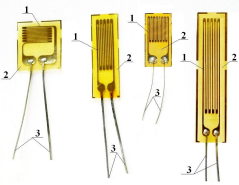
Рис. 15. Внешний вид тензометрических преобразователей (тензодатчиков)
Тензометрические преобразователи приклеивают к испытуемой детали и к их соединительным проводникам подводят стабилизированное электрическое напряжение. Если деталь в процессе нагружения, например, растягивается, то вместе с ней растягивается и фольга тензодатчика. Принцип работы тензодатчиков основан на том, что при его удлинении его электрическое сопротивление увеличивается, уменьшая проходящий по датчику ток по закону Ома:
 (2.2)
(2.2)
где I– сила тока в цепи;
U– подведенное к датчику напряжение;
R- электрическое сопротивление проводника.
Сила проходящего через тензодатчик тока фиксируется амперметром. При этом величина тока будет пропорциональна деформации ε детали. Величина этой пропорциональности заранее определяется отдельным экспериментом. Таким образом, в процессе воздействия на деталь силой F, происходит её деформация на величину ε. Сопротивление тензодатчика изменяется на величину ΔR, и как следствие, изменяется проходящий через тензодатчик ток.
Однако, деформация детали очень мала. Также очень мало и изменение ΔRсопротивления тензодатчика. Оно составляет примерно 0,01% от абсолютного значения сопротивления тензодатчикаR, или:
ΔR= 0,0001R (2.3)
Это очень маленькая величина. Поэтому если мы обозначим величину проходящего через датчик тока как I, то в результате изменения сопротивления датчика на очень малую величину ΔR, ток изменится на величину ΔI.
ΔI очень малая величина по отношению кIи тоже составляет от неё сотые доли процента. Поэтому одним из недостатков тензодатчика является необходимость обеспечения большой длины проводника (чем длиннее фольга, тем больше изменение сопротивления ΔRтензодатчика, тем он более чувствителен к действию силыF).
Кроме того, электрическое сопротивление проводника сильно зависит от его температуры, а значит от температуры окружающей среды.
Размеры проводника удалось уменьшить, сложив его в спираль и скрепив клеевой пленкой (см. рис. 16).
Для того чтобы два главных недостатка (температура и ток) не оказывали влияния на результаты измерения силы F, тензодатчики собирают в мостовую схему (рис. 16, а).Мостовая схема позволяет измерять не абсолютное значение проходящего через датчики тока I, а только изменяемую его часть ΔI. В мостовой схеме прибор для измерения величины тока установлен так, что большой ток питания не проходит через него. Это позволило установить гораздо более чувствительный прибор – микроамперметр.
Рассмотрим принцип работы измерительного моста(измерительный мост Уитстона).Обязательным условием линейной работы моста является то, что собранные в мост четыре тензорезистора исходно имеют одинаковое сопротивление R1=R2=R3=R4.

а) б)
Рис. 16. Измерительный тензометрический мост
Поданный на одну из диагоналей моста (точки BиD) электрический ток, следуя от "+" к "─" согласно закону Кирхгофа в равной степени расходится в точке В в двух направлениях, следуя через точки А и С, уходит в точкуD. Поскольку сопротивления тензодатчиков равны, то и напряжения в точках А и С тоже равны. Следовательно, разница напряжений между точками А и С (на второй диагонали моста) отсутствует. Поэтому ток через микроамперметрμАне идет. Мост в этом случае находится в сбалансированном состоянии.
Для измерения силы F, тензометрические преобразователи наклеивают на поверхность тензобалки (балка равного сопротивления изгибу в заделке), как показано на рис. 16, б. Воздействующая на тензобалку изгибающая силаF, деформирует её. При деформации верхние волокна тензобалки с наклеенными на неё тензометрическими преобразователямиR1 иR2растягиваются. При этом нижние волокна, с наклеенными на нижнюю поверхность тензобалки тензометрическими преобразователямиR3иR4– сжимаются.
Под действием силы Fверхние волокна балки вместе с датчикамиR1иR2растягиваются. Электрическоесопротивление датчиков R1 и R2 увеличивается.В соответствии с законом Кирхгофа из точки В больше тока пойдет по пути меньшего сопротивления через точку С. При этом напряжение в точке С станет выше, чем в точке А. Произойдет разбаланс тензомоста. Под действием разности напряжений между точками С и А, малая часть тока пойдет через микроамперметрμАот точки С к точке А и далее кD. Микроамперметр покажет величину этого тока.
Следует помнить, что нижние волокна, с наклеенными на нижнюю поверхность тензобалки датчиками R3иR4сжимаются. Электрическоесопротивление датчиков R3 и R4 уменьшается. В итоге разница напряжений между точками С и А еще больше увеличится. Под действием разности напряжений между точками С и А, величина тока проходящего через микроамперметрμАот точки С к точке А увеличится.
Следует помнить, что величина изменения сопротивления тензорезисторов ΔR прямопропорциональна деформации ε, которая в свою очередь прямопропорциональна действующей силе F. Следовательно измерительный микроамперметр μА будет показывать ток разбалансировки моста, величина которого будет прямопропорциональна действующей на тензобалку силе F.
Таким образом, чем больше сила F, тем больше деформация балкиε, пропорционально деформируются тензодатчики, тем больше ток величину которого показывает микроамперметр. То есть, показания прибора прямо пропорционально отражают величину действующей на балку силыF.
Тензометрические мосты, в которых все четыре тензодатчика участвуют в измерении сил (все четыре подвергаются растяжениям и сжатиям) называются четырежды активными.
Тензометрические мосты, в которых в измерении сил участвуют два тензодатчика (например: только R1 и R2) называются дважды активными. Для обеспечения термокомпенсации дважды активных мостов их неактивные датчики (R3 и R4) наклеивают на ту же балку, только перпендикулярно направлению деформации.
Тензометрические мосты, в которых в измерении сил участвует только один тензодатчик (например: только R1) называются единожды активными. Для обеспечения термокомпенсации единожды активных мостов их неактивные датчики (R2, R3 и R4) наклеивают на ту же балку, только перпендикулярно направлению деформации.
Балансировка тензометрического моста. Для того, чтобы тензомост был сбалансирован, необходимо чтобы напряжения в его точках А и С были равны, т.е.:
UА = UС (2.4)
Выполнение этого условия обеспечивается только при абсолютном равенстве сопротивлений:
R1=R2=R3=R4 (2.5)
Практически выполнить это условие невозможно по двум причинам. Во-первых, не существует даже двух абсолютно одинаковых сопротивлений. Во-вторых, даже если бы и удалось подобрать четыре тензорезистора с одинаковыми сопротивлениями, то после их наклеивания на тензобалку их сопротивления изменятся вследствие деформаций от действия клея.
Поэтому после наклеивания просушки и соединения тензодатчиков напряжения в точках АиСполучаются не равными и тензомост нуждается в принудительной балансировке.Главной задачей балансировки тензомоста является обеспечение равенства напряжений в точках А и С.Для этого схему тензомоста дополняют тремя сопротивлениямиR5,R6иR7 (рис. 17, а).
Основным (балансировочным) резистором является переменный резистор R7. Для выполнения балансировки моста необходимо перемещать подвижный контакт резистораR7 либо в сторону резистораR5, либо в сторону резистораR6. В случае, когда подвижный контакт переменного резистораR7 перемещается в стороны резистораR5напряжение в точкеАувеличивается. В случае, когда подвижный контакт переменного резистораR7 перемещается в стороны резистораR6напряжение в точкеАуменьшается.
|
|
|
|
а) |
б) |
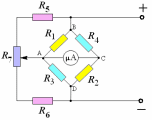

Рис. 17. Тензометрический датчик измерения силы:
а) схема балансировки тензомоста; б) внешний вид промышленного датчика модели 9035 ДСТ
Таким образом, для выполнения балансировки тензометрического моста необходимо перемещая подвижный контакт переменного резистора R7, наблюдать за стрелкой микроамперметраμА. Балансировка тензомоста считается выполненной, когда стрелка микроамперметраμАустановится на нулевой отметке шкалы.
Резисторы R5и R6выполняют предохранительные функции. В случае, если оператор по ошибке переместит подвижный контакт переменного резистораR7, в одно из крайних положений большой ток может вывести из строя микроамперметр или один из тензодатчиков моста. Поэтому чтобы ограничить ток, проходящий через микроамперметр и тензодатчики моста при нахождении переменного резистораR7 в крайних положениях, установлены предохранительные резисторыR5и R6.
Температурная компенсация тензомоста. В случае измерения сил с использованием тензометрических датчиков приходится иметь дело с микродеформациями и микротоками. Но микродеформации может вызвать простой нагрев или охлаждение тензодатчиков, который нарушит баланс моста и внесет серьезные погрешности в процесс измерения сил. Для устранения этого негативного воздействия используется температурная компенсация измерительного моста. Температурная компенсация тензомоста основана на том, что равное изменение сопротивлений тензорезисторовR1иR4не влияет на баланс тензомоста. Все тензодатчики наклеены на противоположные стороны тензобалки друг против друга, и снаружи теплоизолированы. Поэтому они будут иметь одинаковую температуру такую же, как у металла тензобалки на поверхность которой они наклеены. ДатчикиR3иR2наклеены также друг против друга по тому же принципу, чтоR1иR4, а значит и их равное изменение сопротивлений от температуры не нарушит баланс моста. Если температура окружающей среды изменится, то она одинаково изменится и у всех датчиков тензомоста. Таким образом, баланс моста не изменится.
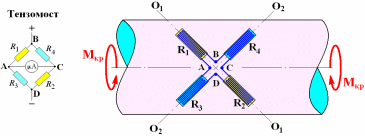
Измерение крутящего момента. Иногда в процессе измерений силовых параметров возникает необходимость измерения крутящего момента Мкр, действующего на вал. Для решения этой задачи очень эффективным является тензометрический метод. Измерение производят при помощи тензометрических датчиков R1, R2, R3 и R4, наклеенных на вал (рис. 18).
а) б)
Рис. 18. Тензометрический вал для измерения крутящего момента
Датчики наклеивают строго вдоль главных осей напряжений О1 - О1 и О2 – О2, которые, как известно, расположены под углом 45о к оси вращения вала. Для того, чтобы вал не реагировал на действия изгибающих моментов, тензодатчики размещают с противоположных сторон вала. То есть, тензорезисторы R1 и R2 ,воспринимающие напряжения кручения вдоль главной оси О1 - О1 располагают с одной стороны вала, а тензорезисторы R3 и R4 ,воспринимающие напряжения кручения вдоль главной оси О2 – О2 располагают с другой, противоположной стороны вала. При этом очень важно добиться максимально возможной симметричности расположения датчиков.
После наклейки тензодатчиков на вал производят их соединение в мостовую схему в соответствии с рис. 18, а). К точкам B и D тензомоста подключают источник стабилизированного напряжения 5 30 Вольт. Между точками А и С включают микроамперметр μА, а также резисторы для балансировки тензомоста и выполняют балансировку. После этого тензометрический вал готов к работе.
Измерение крутящего момента производят следующим образом. При нагружении вала крутящим моментом тензометрические датчики, наклеенные вдоль главной оси О1 - О1, испытывают напряжение растяжения. Электрическое сопротивление датчиков R1 и R2 увеличивается. В это время тензометрические датчики, наклеенные вдоль главной оси О2 – О2, испытывают напряжение сжатия. Электрическое сопротивление датчиков R3 и R4 уменьшается. Происходит разбаланс тензометрического моста. Величина тока разбаланса прямопропорциональна величине крутящего момента Мкр. Она измеряется микроамперметром μА.