

3.7 Механические характеристики электрических машин и производственных механизмов
Электрическая машина предназначена для приведения в движение рабочих органов производственного механизма. Вместе они образуют электропривод.
При рассмотрении работы электродвигателя, приводящего в действие производственный механизм, необходимо, прежде всего, выявить соответствие механических характеристик производственного механизма характеристикам двигателя.
Различные производственные механизмы обладают различными механическими характеристиками. Теоретически их можно описать следующей эмпирической формулой:

где:
![]() – момент сопротивления производственного
механизма при скорости ώ;
– момент сопротивления производственного
механизма при скорости ώ;
![]() – момент сопротивления при скорости
равной нулю;
– момент сопротивления при скорости
равной нулю;
![]() - момент сопротивления при номинальной
скорости;
- момент сопротивления при номинальной
скорости;
![]() -
показатель степени, характеризуется
изменением момента сопротивления при
изменениях скорости.
-
показатель степени, характеризуется
изменением момента сопротивления при
изменениях скорости.
Приведённая формула позволяет классифицировать механические характеристики производственных механизмов ориентировочно на следующие типы: (Рис. 3.16):
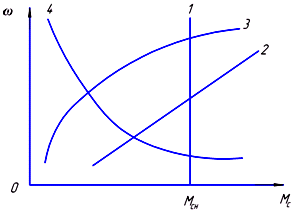
Рисунок 3.16 Механические характеристики произвольных механизмов:
-
 =0;
2) -
=0;
2) - =1;
3) -
=1;
3) - =2;
4) -
=2;
4) - =
-1
=
-1
1.
Не зависящая от скорости механическая
характеристика (прямая 1). При этом
![]() =0
и момент
=0
и момент![]() не зависит от скорости вращения. Такой
характеристикой обладают подъёмные
краны, лебёдки, поршневые насосы, нории.
не зависит от скорости вращения. Такой
характеристикой обладают подъёмные
краны, лебёдки, поршневые насосы, нории.
2.
Линейно – возрастающая механическая
характеристика (прямая 2). В этом случае
![]() =1
и момент сопротивления линейно зависит
от скорости ώ, увеличиваясь с её
возрастанием, (ленточные транспортёры,
конвейеры, генераторы с независимым
возбуждением)
=1
и момент сопротивления линейно зависит
от скорости ώ, увеличиваясь с её
возрастанием, (ленточные транспортёры,
конвейеры, генераторы с независимым
возбуждением)
3.
Нелинейно – возрастающая (параболическая)
механическая характеристика (кривая
3). Этой характеристике соответствует
![]() =2,
момент сопротивления Мс, здесь зависит
от квадрата скорости. Механизмы,
обладающие такой характеристикой,
называют иногда механизмами с вентиляторным
моментом. Такой характеристикой обладают:
вентиляторы, центробежные насосы,
сепараторы.
=2,
момент сопротивления Мс, здесь зависит
от квадрата скорости. Механизмы,
обладающие такой характеристикой,
называют иногда механизмами с вентиляторным
моментом. Такой характеристикой обладают:
вентиляторы, центробежные насосы,
сепараторы.
4.
Нелинейно – спадающая механическая
характеристика (кривая 4). При этом
![]() =
-1 и Мс изменяется обратно пропорционально
скорости, а мощность, потребляемая
механизмом, остаётся постоянной
(некоторые расточные, фрезерные и другие
металлорежущие станки).
=
-1 и Мс изменяется обратно пропорционально
скорости, а мощность, потребляемая
механизмом, остаётся постоянной
(некоторые расточные, фрезерные и другие
металлорежущие станки).
Приведенные характеристики не исчерпывают всех практически возможных случаев, но дают представление о характеристиках некоторых типичных производственных механизмов.
Почти
все электродвигатели обладают тем
свойством, что скорость их является
убывающей функцией момента двигателя.
Это обычно относится почти ко всем
электродвигателям, применяемым в
производстве, т.е. к двигателям постоянного
тока параллельного возбуждения
(шунтовым), последовательного (сириесного
) и смешанного возбуждения (компаундным),
а также к асинхронным двигателям. Однако
степень изменения скорости с изменением
момента у разных двигателей различна
и характеризуется, так называемой
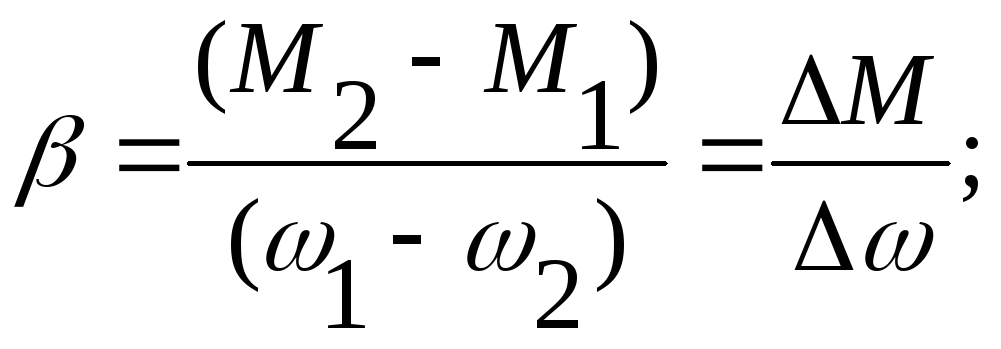
жёсткостью ![]() их механических характеристик, т.е.
отношением разности моментов, развиваемых
электродвигателем, к соответствующей
разности угловых скоростей электропривода:
их механических характеристик, т.е.
отношением разности моментов, развиваемых
электродвигателем, к соответствующей
разности угловых скоростей электропривода:
Механические характеристики электродвигателей по жесткости можно разделить на три основные категории (Рис. 3.17):
1.
Абсолютно жёсткая механическая
характеристика
![]() - это характеристика, при которой скорость
с изменением момента остаётся неизменной
(прямая 1 – механическая характеристика
синхронного двигателя).
- это характеристика, при которой скорость
с изменением момента остаётся неизменной
(прямая 1 – механическая характеристика
синхронного двигателя).
2.
Жёсткая механическая характеристика
![]() -
это характеристика, при которой с
увеличением момента уменьшается
скорость, но в малой степени (кривая 2).
Такой характеристикой обладают двигатели
постоянного тока независимого и
параллельного возбуждения.
-
это характеристика, при которой с
увеличением момента уменьшается
скорость, но в малой степени (кривая 2).
Такой характеристикой обладают двигатели
постоянного тока независимого и
параллельного возбуждения.
3.
Мягкая механическая характеристика
![]() -
это характеристика, при которой с
изменением момента скорость изменяется
значительно (кривая 3). Такой характеристикой
обладают двигатели постоянного тока
последовательного возбуждения. Двигатели
смешанного возбуждения могут быть
отнесены ко второй или третьей группе
в зависимости то степени жёсткости
механической характеристики.
-
это характеристика, при которой с
изменением момента скорость изменяется
значительно (кривая 3). Такой характеристикой
обладают двигатели постоянного тока
последовательного возбуждения. Двигатели
смешанного возбуждения могут быть
отнесены ко второй или третьей группе
в зависимости то степени жёсткости
механической характеристики.
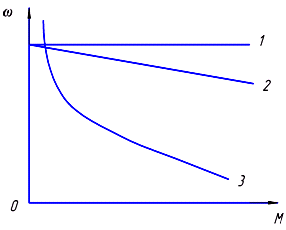
Рисунок 3.17 Примеры механических характеристик некоторых электродвигателей: 1 - абсолютно жесткая; 2 - жесткая; 3 - мягкая.
Для
асинхронного электродвигателя степень
жёсткости в различных точках механической
характеристики различны. Между
критическими значениями моментов в
двигательном ![]() и генераторном
и генераторном ![]() –
режимах механическая характеристика
асинхронного двигателя оказывается
сравнительно жёсткой (Рис. 3.18).
–
режимах механическая характеристика
асинхронного двигателя оказывается
сравнительно жёсткой (Рис. 3.18).
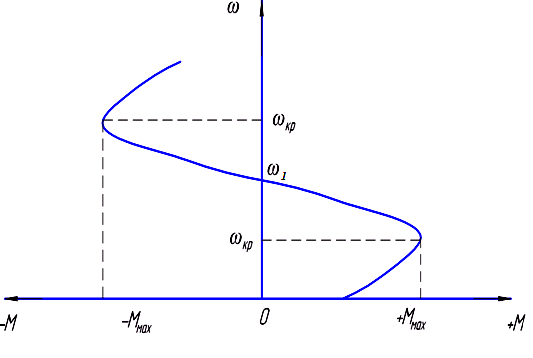
Рисунок 3.18 Механическая характеристика асинхронного двигателя (упрощенная).