

3.8 Совместная механическая характеристика электрического двигателя и производственного механизма.
При вращательном движении между моментом, развиваемым двигателем, и моментом сопротивления в системе электродвигатель – рабочая машина существует соотношение, называемое уравнением движения электропривода:
![]() (3)
(3)
где:
![]() - момент, развиваемый двигателем;
- момент, развиваемый двигателем;
![]() -
момент сопротивления рабочей машины,
приведённый к валу двигателя;
-
момент сопротивления рабочей машины,
приведённый к валу двигателя;
J – момент инерции движущихся частей системы двигатель – рабочая машина, приведённая к валу двигателя;
![]() -
угловое ускорение движущихся масс.
-
угловое ускорение движущихся масс.
Вращающий
момент, развиваемый двигателем при
работе, принимается положительным, если
он направлен в сторону движения привода,
и отрицательным, если направлен в
сторону, обратную движению. Необходимо
отметить, что знак минус перед
![]() указывает на тормозящее действие момента
сопротивления, что отвечает усилию
резания, потерям трения, подъёму груза,
сжатию пружины и т.п. при положительном
знаке скорости. При спуске груза,
раскручивании или разжатии пружины и
т.п. перед
указывает на тормозящее действие момента
сопротивления, что отвечает усилию
резания, потерям трения, подъёму груза,
сжатию пружины и т.п. при положительном
знаке скорости. При спуске груза,
раскручивании или разжатии пружины и
т.п. перед![]() ставится знак плюс, поскольку в этих
случаях момент сопротивления помогает
вращению привода.
ставится знак плюс, поскольку в этих
случаях момент сопротивления помогает
вращению привода.
Аналогично получают соотношение для случаев поступательного движения:
±![]() ±
±![]() =
m
=
m![]() ;
;
![]()
![]()
![]() - усилие развиваемое двигателем;
- усилие развиваемое двигателем;
![]() – приведённое усиление сопротивления
системы электродвигатель – рабочая
машина;
– приведённое усиление сопротивления
системы электродвигатель – рабочая
машина;
m – приведённая масса движущихся частей системы;
![]() -
линейное ускорение движущихся масс.
-
линейное ускорение движущихся масс.
Уравнение
(3) показывает, что развиваемый двигателем
вращающий момент
![]() уравновешивается моментом сопротивления
уравновешивается моментом сопротивления![]() на валу и инерционным или динамическим
моментом:
на валу и инерционным или динамическим
моментом:
![]() .
.
Из анализа этого уравнения видно, что:
При
 >
> ,
, >0,
имеет место ускорение привода;
>0,
имеет место ускорение привода;При
 <
< ,
, <0,
имеет место замедление привода;
<0,
имеет место замедление привода;При
 =
= ,
, =0,
электропривод работает в установившемся
режиме.
=0,
электропривод работает в установившемся
режиме.
Работе электрического двигателя и производственного механизма в установившемся режиме соответствует равновесие, при определённой скорости вращения, моментов сопротивления механизма и вращающего момента двигателя.
Изменение момента сопротивления на валу двигателя приводит к тому, что скорость двигателя и момент, который он развивает, могут автоматически меняться, и привод будет продолжать работать при другой установившейся скорости с новым значением момента.
Для восстановления равновесия между изменившимся моментом сопротивления и моментом двигателя во всех не электрических двигателях требуется участие специальных регуляторов, которые воздействуют на источник энергии, увеличивая или соответственно уменьшая подачу воды, топлива или пара. В электрических двигателях роль автоматического регулятора выполняет э.д.с. двигателя. Эта особенность электродвигателей автоматически поддерживать равновесие системы при изменяющемся моменте сопротивления, является весьма ценным свойством имеющим большое будущее.
На рисунке 3.19 приведена механическая характеристика вентилятора 1, механическая характеристика асинхронного двигателя 2, приводящего вентилятора, и совместная механическая характеристика вентиляторного агрегата 3.
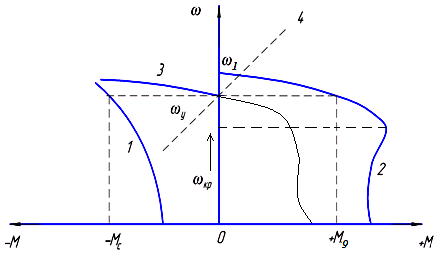
Рисунок 3.19 Совместная механическая характеристика вентиляторного агрегата (вентилятор и асинхронный двигатель).
При
установившейся скорости агрегата
![]() двигатель развивает момент:
двигатель развивает момент:
![]() =
=![]() ,
в этом случае момент совместной
механической характеристики агрегата
будет равен нулю. Работа электропривода
при скорости
,
в этом случае момент совместной
механической характеристики агрегата
будет равен нулю. Работа электропривода
при скорости![]() устойчива, т.к. с увеличением скорости
приращение момента оказывается
отрицательным, а при уменьшении скорости
положительным. Кривая 3 на рисунке будет
примером совместной характеристики,
при которой агрегат будет работать
устойчиво. Если бы совместная характеристика
агрегата имела бы вид кривой 4, то работа
была бы неустойчивой.
устойчива, т.к. с увеличением скорости
приращение момента оказывается
отрицательным, а при уменьшении скорости
положительным. Кривая 3 на рисунке будет
примером совместной характеристики,
при которой агрегат будет работать
устойчиво. Если бы совместная характеристика
агрегата имела бы вид кривой 4, то работа
была бы неустойчивой.
Рассмотренные условия работы электропривода в установившемся режиме характеризует статическую устойчивость привода, когда изменение во времени скорости и момента происходит относительно медленно в отличии от динамической устойчивости, имеющий место при переходных режимах.
Обычно при проектировании электропривода механическая характеристика производственного механизма является уже заданной. Поэтому для получения устойчивой работы в установившемся режиме для определенных скоростей и моментов сопротивления производственных механизмов необходимо подбирать механическую характеристику электродвигателя соответствующей формы. Это может быть достигнуто подбором и изменением электрических параметров цепей привода. Иногда для получения требуемых механических характеристик приходится применять специальные схемы включения электрических машин и аппаратов для их управления.
Математически
условия статистической устойчивости
доказывается следующим образом. Уравнение
движение привода ![]() ,
запишем через жесткости механических
характеристик двигателя
,
запишем через жесткости механических
характеристик двигателя ![]() и механизма
и механизма ![]() :
:
![]() .
Решим это дифференциальное уравнение
методом разделения переменных
.
Решим это дифференциальное уравнение
методом разделения переменных ![]() .
Решение
.
Решение ![]() Следовательно условие статистической
устойчивости выполняется, если показатель
степени
Следовательно условие статистической
устойчивости выполняется, если показатель
степени ![]() отрицательное, т.е.
отрицательное, т.е. ![]() или
или ![]()