

Elektrichesky_privod_Kosmatov_V_I_2012
.pdfГЛАВА ЧЕТВЁРТАЯ. ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРОПРИВОДАХ С ДВИГАТЕЛЯМИ ПОСЛЕДОВАТЕЛЬНОГО И СМЕШАННОГО ВОЗБУЖДЕНИЯ
4.1. Основные уравнения и основные соотношения для электроприводов с двигателями последовательного возбуждения
Электроприводы постоянного тока с двигателями последовательного возбуждения широко применялись для вспомогательных механизмов прокатных станов, для механизмов кранов (тележки, моста, подъѐма), для транспортных устройств.
В настоящее время электроприводы с ДПТ ПВ удерживают свои позиции в электротяге (тяговые двигатели), в средствах внутризаводского транспорта, например, самоходные тележки, рудные и угольные самоходные вагоны и т.п. Это обусловлено тем, что в этом случае достаточно иметь только один троллей, а последовательное возбуждение – по той причине, что двигатели при этом не боятся больших снижений напряжений, лучше выдерживают перегрузки на подъѐмах пути благодаря тому,
что при росте тока двигателя его момент возрастает М I яn , где n 2.
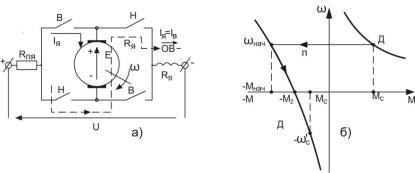
Принципиальная схема включения ДПТ ПВ представлена на рис. 4.1,а, а схема модели с включением обмоток двигателя – на рис. 4.1,б.
Включение обмотки возбуждения в силовую цепь, мощность которой на два порядка выше, чем мощность возбуждения, создаѐт условия для форсированного изменения потока двигателя. Анализ динамических свойств ЭМП в этом случае без учѐта вихревых токов, наводящихся в полюсах и станине при быстрых изменениях потока, приводит к значительным ошибкам. В первом приближении влияние вихревых токов мож-
но учесть добавлением короткозамкнутой обмотки с числом витков wв т
с током iв т и связанной с потоком Ф коэффициентом связи, равным единице (см. рис. 4.1,б).
70
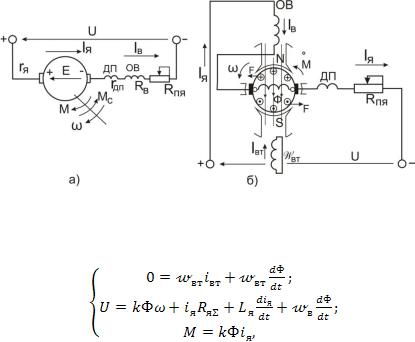
Рис. 4.1. Схема (а) и модель (б) ДПТ ПВ
Математическое описание процесса преобразования энергии в ДПТ ПВ имеет следующий вид
|
|
|
|
(4.1) |
где Rя rя rдп Rв Rпя . |
|
|
||
В статическом режиме |
diя |
0 , |
dФ |
0 имеем iв т =0 и основ- |
|
|
|||
|
dt |
dt |
|
|
ные уравнения электромеханической и механической характеристик электропривода с ДПТ ПВ аналогичны таковым для ЭП с ДПТ НВ
|
U я |
|
|
I я Rя |
; |
(4.2) |
|||
кФ(I я ) |
кФ(I я ) |
||||||||
|
|
|
|
|
|
||||
|
|
U я |
|
|
MRя |
|
(4.3) |
||
кФ(I я ) |
к2Ф2 (I я ) |
||||||||
|
|
|
71 |
|
|
|
|||
с той лишь разницей, что магнитный поток Ф является в общем случае нелинейной функцией тока I я , а момент
М кФ(I я )I я . |
(4.4) |
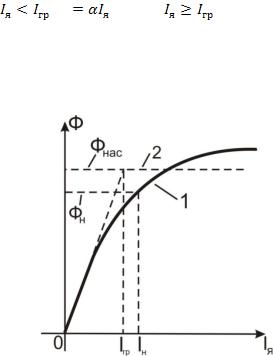
Характеристика намагничивания Ф= f (I я ) показана на рис. 4.2 (кривая 1) и свидетельствует о том, что магнитная цепь двигателя при номинальном токе якоря I н насыщена. В связи с этим в дальнейшем
для анализа формы статических характеристик ДПТ ПВ используется аппроксимация характеристики намагничивания двумя прямыми, как это показано на рис. 4.2 (ломаная 2).
При |
Ф |
, а при |
магнитный поток дви- |
гателя примерно постоянный Ф=Фнас const .
При такой аппроксимации кривой Ф f (I я ) электромеханиче-
ская и механическая характеристики при различных токах якоря имеют различные выражения.
Рис. 4.2. Характеристика намагничивания Ф f (I я ) ДПТ ПВ
72

В |
случае I я < I гр коэффициент |
пропорциональности |
Фнас / I гр |
и уравнения преобразуются к виду |
|
|
|
|
U |
|
|
|
|
Rя |
; |
|
|
(4.5) |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
к I я |
|
|
|
|
|
|
к |
|
||||||||
|
|
|
|
U |
|
|
|
|
|
|
Rя |
. |
(4.5) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
к М |
|
|
к |
|
|||||||||||
При I я > I гр |
Ф=Фнас const и те же уравнения запишутся |
||||||||||||||||||||
так |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
I я Rя |
; |
|
(4.6) |
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
кФнас |
|
|
кФнас |
|
|||||||||||||||
|
|
|
|
U |
|
|
МRя |
. |
(4.7) |
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
кФ |
|
|
|
к2Ф2 |
|
|||||||||||||
|
|
|
|
|
|
нас |
|
|
|
|
|
|
|
нас |
|
||||||
На рис. 4.3 |
представлена |
|
|
механическая |
характеристика |
||||||||||||||||
f (М ) для принятой аппроксимации кривой намагничивания. |
|||||||||||||||||||||
Уравнения (4.4), (4.5) и рис. 4.3 показывают, что при изменении нагрузки на валу двигателя механическая и электромеханическая характеристики электропривода имеют гиперболический характер и при M 0,I я 0 асимптотически приближаются к оси ординат ( ),
а при M и |
I я к прямой, параллельной оси абсцисс с |
Rя / к . |
|
При I я > I гр |
Ф=Фнас const , в связи с чѐм механическая и |
электромеханическая характеристики электропривода становятся в соответствии с уравнениями (4.6), (4.7) линейными. Жѐсткость механической
характеристики |
dM |
при I я < I гр |
переменная и отрицательная |
|
d |
||||
|
|
|
||
величина, которая увеличивается с увеличением нагрузки, а при I я > I гр |
||||
|
dM |
|
к2Фнас2 |
const . |
|
d |
Rя |
||||
|
|
|
|||
|
|
73 |
|
|
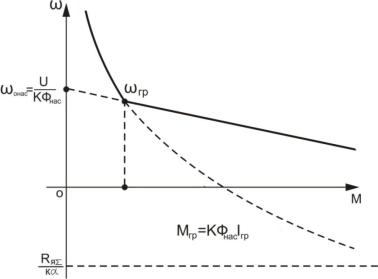
Рис. 4.3. Механические характеристики электропривода ДПТ ПВ
|
То обстоятельство, что при М 0, I я |
0, обуславлива- |
|||
ет что и Ф 0, а ЭДС двигателя E= кФ U из условия равновесия. |
|||||
|
В действительности в электрической машине есть остаточный |
||||
магнитный поток Фост , |
который относительно мал, в связи с чем ско- |
||||
рость |
идеального |
холостого |
хода |
двигателя |
ограничена |
0 Uн / кФост , однако она достигает чрезмерно больших значений,
превышающих допустимую по условиям механической прочности. Поэтому при проектировании и эксплуатации электроприводов с ДПТ ПВ необходимо исключить возможность их работы с малыми нагрузками.
Естественные характеристики электропривода с ДПТ ПВ показаны на рис. 4.4. Сильная положительная связь по току, создаваемая последовательной обмоткой возбуждения, практически устраняет реакцию якоря и приводит в области допустимой перегрузки к возрастанию потока на 10-15%. Поэтому при одинаковой допустимой перегрузке по токуi 2 2,5 перегрузочная способность по моменту у электроприводов с
74
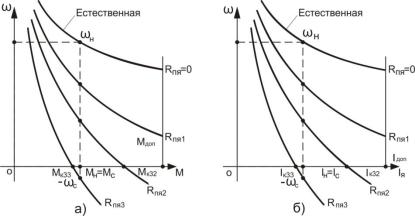
ДПТ ПВ выше, чем у электроприводов с ДПТ НВ, и составляет
i 2,5 3 .
Электроприводам с ДПТ ПВ присуще так называемое широкое саморегулирование скорости: при снижении нагрузки против номинальной допустимая скорость увеличивается в 1,5-2 раза, при этом обеспечивается повышение производительности при данной мощности двигателя. Также важным достоинством двигателя считается повышение перегрузочной способности.
В связи с нелинейностью кривой намагничивания рассчитать естественные и искусственные характеристики электропривода с ДПТ ПВ только по его номинальным данным не представляется возможным. Для практических расчѐтов используют приведѐнные естественные характе-
ристики f (M ) , M f (I я ) в абсолютных единицах, например для
серии двигателей Д, либо в относительных универсальных характеристиках для серии, например ДП. Методика построения естественной механической характеристики в этих случаях очень простая.
Рис. 4.4. Механические (а) и электромеханические (б) характеристики электропривода с ДПТ ПВ
По данным каталога строится скоростная f (I я ) и моментная M f (I я ) на одном графике (см. рис. 4.5). Задаваясь рядом значе-
75
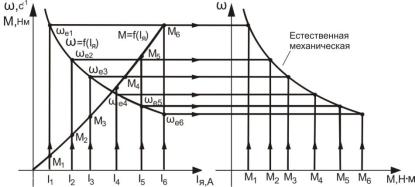
ний I я , находятся величины ei и M i , соответствующие I я i и строится естественная механическая характеристика f (M ) .
Реостатные характеристики f (M ) и I я f (М ) для различ-
ных значений  могут быть построены графическим или графоаналитическим методами.
могут быть построены графическим или графоаналитическим методами.
Рис. 4.5 Естественные скоростная f (I я ) , механическаяf (M ) и моментная характеристики
Графоаналитический метод построения основан на том, что при I я const кФ на любой реостатной характеристике тоже имеет посто-
янное значение. Тогда |
|
|
|
|
|
|
|
|
|
U н I я iRя |
; |
||
ei |
|
|||||
|
|
|
кФi |
|||
|
|
|
|
|||
pi |
|
U н I я iRя |
|
|||
|
кФi |
|||||
|
|
|
|
|||
и при I яi const , исключая кФi , получим
76
|
|
|
|
U н I я iRя |
. |
(4.8) |
|||||
|
|
|
|||||||||
|
pi |
|
ei U |
н |
I |
я i |
R |
я |
|
||
|
|
|
|
|
|
|
|
||||
Электропривод с ДПТ ПВ при постоянном напряжении может работать в тех же энергетических режимах, что и электропривод с ДПТ НВ. Режима идеального холостого хода и генераторного режима параллельно с сетью (рекуперативное торможение) получить невозможно, так как при нагрузке ,стремящейся к нулю, к нулю стремится и магнитный поток, а ось становится асимптотой механической характеристики.
Режим торможения противовключением осуществляется , как у электропривода с ДПТ НВ. При активном моменте переход в режим
противовключения (точка c ) происходит при M c > M к.з или
I c > I к . з (см. рис. 4.4).
При реверсе напряжения, подводимого к якорю двигателя в соответствии со схемой рис. 4.6,а, происходит торможение противовключени-
ем от нач до 0 ( М M 2 ). Если якорь двигателя не отключать от сети, он начнѐт разгоняться в обратном направлении до скорости
с' .
Рис. 4.6. Принципиальная электрическая схема электропривода (а) и механические характеристики (б)
77
Начальное значение тока при торможении в режиме противовключения  , при этом величина сопротивления Rпя определяется по формуле
, при этом величина сопротивления Rпя определяется по формуле
R |
|
|
U н Енач |
(R |
|
R ) , |
(4.9) |
пя |
|
я |
|||||
|
|
I я доп |
в |
|
|||
|
|
|
|
|
|
||
а начальный момент равен |
|
|
|
|
|
|
|
|
|
|
М кФI ядоп, |
|
(4.10) |
||
где Енач U Ic (Rя Rв ) ; |
|
|
|
|
|
|
|
Фнач - магнитный поток, соответствующий току возбуждения;
,определяемый по кривой намагничивания.
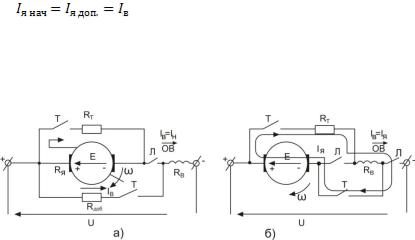
Динамическое торможение электропривода с ДПТ ПВ может осуществляться по двум схемам:
а) по схеме ДПТ независимого возбуждения (рис. 4.7,а); б) по схеме с самовозбуждением (рис. 4.7,б).
Рис. 4.7 Схемы осуществления динамического торможения электропривода с ДПТ ПВ
По схеме рис 4.7,а якорь двигателя с помощью контакта линейного контактора Л отключается от сети, а с помощью контакта контак-
тора Т замыкается на сопротивление Rт . Обмотка возбуждения ОВ контактом Т через Rдоб подключается к сети. Величина добавочного сопротивления определяется
R |
|
U |
R |
|
, |
|
в |
||||
доб |
|
Iв н |
|
||
|
|
|
|
||
78
т.е. цепь возбуждения потребляет из сети мощность
Р Рн U н Iв н ,
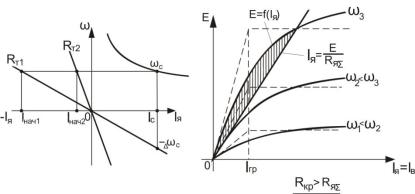
что является недостатком такого способа динамического торможения. Механические характеристики этого режима представлены на рис. 4.8, аналогичные характеристикам рис. 3.10, в.
Рис. 4.8 Механические и электро- |
Рис. 4.9. Вольтамперные харак- |
||||||
механические характеристики |
-теристики Е f (I |
я |
) , |
I |
я |
Е / R |
я |
|
|
|
|
|
|||
электропривода с ДПТ ПВ по |
при динамическом торможении |
||||||
схеме НВ ( RТ1 < RТ 2 ) |
с самовозбуждением |
|
|
||||
При динамическом торможении с самовозбуждением (рис. 4.7,б) делаются следующие переключения: контакты Л размыкаются (двигатель отключается от сети), контакты Т замыкаются – якорь двигателя,
добавочный резистор RТ и обмотка возбуждения включаются в один контур, по которому протекает ток I я Iв .
Так вот первым условием самовозбуждения является наличие остаточного магнитного потока Фост такого знака, чтобы при данном
направлении вращения ЭДС, наводимая остаточным потоком, вызывала ток возбуждения, увеличивающий поток двигателя, тем самым увеличивается ЭДС, ток, поток и т.д.
Второе условие самовозбуждения поясняет рис. 4.9. Здесь приведѐн ряд зависимостей Е f (I я ) , соответствующих различной скорости
79