

Elektrichesky_privod_Kosmatov_V_I_2012
.pdfI1н , I2' н , I ян - номинальные значения токов силовых обмоток.
Количество теплоты, выделяемое в двигателе, возрастает с увеличением нагрузки, что вызывает повышение температуры его частей. Максимально допустимая температура двигателя определяется классом изоляции его обмоток. Повышение температуры изоляции свыше максимально – допустимой вызывает резкое старение изоляции. Это определяет важнейшее ограничение, накладываемое на процесс преобразования энергии – ограничение по нагреву двигателя. Допустимая по нагреву нагрузка двигателя называется его номинальной нагрузкой и указывается в паспортных и каталожных данных. К числу номинальных данных двигателя относятся номинальная мощность на валу Рн (кВт), номинальный
ток Iн (А), номинальное напряжение его обмоток Uн (В), частота fн (Гц), номинальная скорость вращения nн (об/мин). Кроме того указываются номинальные значения КПД, а для двигателей переменного тока и коэффициент мощности cos н .
Второе ограничение, накладываемое на процесс преобразования энергии, это допустимые кратковременные перегрузки сверх номинальных, которые определяются перегрузочной способностью двигателя
M доп / М н ; |
i Iдоп / Iн , |
где  ,
,  – максимально-допустимый момент и ток двигателя при
– максимально-допустимый момент и ток двигателя при
кратковременной перегрузке.
Для двигателей постоянного тока перегрузочная способность ограничивается коммутационной устойчивостью (допустимым искрением на коллекторе) и составляет для двигателей серии П, МП
двигателей серии Д 3,5.
Для двигателей переменного тока допустимы большие перегрузки по току силовых цепей, а по моменту перегрузочная способность определяется величиной наибольшего момента, который двигатель может развить при номинальном напряжении сети и номинальной частоте.
Для двигателей постоянного тока третье ограничение обусловлено допустимой скоростью изменения тока якоря
diя |
diя |
|
||
|
|
|
|
|
dt |
dt |
|||
|
доп |
|||
и тоже связано с искрообразованием при коммутации.
50
ГЛАВА ТРЕТЬЯ. ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРОПРИВОДАХ С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТО-
КА НЕЗАВИСИМОГО (ПАРАЛЛЕЛЬНОГО) ВОЗБУЖДЕНИЯ
3.1 Основные уравнения и соотношения для электроприводов с двигателями постоянного тока независимого возбуждения
3.1.1. Принцип действия. Основные уравнения
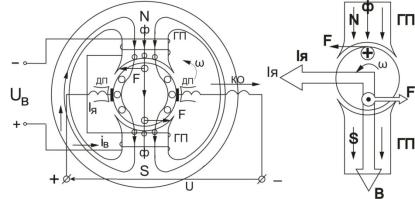
Рис. 3.1. К принципу действия коллекторной машины постоянного тока
По закону Ампера принцип действия любого коллекторного дви-
гателя состоит в том, что на проводник с током  (рис. 3.1) в магнитном поле с магнитной индукцией В (потоком главных полюсов Ф) действует сила
(рис. 3.1) в магнитном поле с магнитной индукцией В (потоком главных полюсов Ф) действует сила
F BlI я , Н |
(3.1) |
51 |
|
где l – длина проводника, м; B - индукция, Тл;
I я – сила тока, А, направление которой определяется по правилу
левой руки. Под действием этой силы (для витка – пара сил) якорь, на котором расположен виток, начинает непрерывно вращаться благодаря коллектору со щеточным аппаратом, обеспечивающим постоянство направления тока в проводнике, находящемся под полюсом, а значит и момента М . Важнейшая особенность, основное достоинство двигателей постоянного тока – прямой угол между вектором магнитной индукции В
и вектором тока I я . На угол влияет только расположение щѐток на кол-
лекторе.
При движении проводников в магнитном поле в соответствии с законом Фарадея в них наводится электродвижущая сила – ЭДС вращения
Eпр Blv , В |
(3.2) |
где v – линейная скорость движения проводников, м/с, направленная по правилу правой руки. В случае витка ЭДС проводников складываются и в соответствии с законом Кирхгофа уравновешиваются напряжением
U E IR , |
(3.3) |
где E Eпр – суммарная ЭДС вращения;
R – сопротивление.
Машина постоянного тока, как и все электрические машины, на основании принципа обратимости Ленца может работать как двигателем, так и генератором. В генераторном режиме коллектор со щетками играет роль выпрямителя и поэтому сохраняется ортогональность между магнитным потоком (индукцией) и током якоря.
Умножив левую и правую часть уравнения (3.3) на ток  , полу-
, полу-
чим
UI |
я |
EI |
я |
I 2R |
(3.4) |
|
|
я я |
|
или баланс мощности в двигательном режиме
P Р |
Р |
, |
(3.5) |
1 эм |
эл |
|
|
где Р1 UI я – мощность, забираемая двигателем из сети, Вт;
Рэм EI я – электромагнитная мощность, Вт;
Рэл I я2Rя - потери мощности в якорной цепи двигателя, Вт;
52
Rя - суммарное сопротивление якорной цепи, Ом.
Баланс мощности в генераторном режиме (механическая мощность,
подводится с вала двигателя) |
|
|
|
|
|
|
|
ЕI |
я |
UI |
я |
I 2R |
; |
(3.6) |
|
|
|
я |
я |
|
|||
Р |
|
P Р |
, |
|
(3.7) |
||
эм |
1 |
|
эл |
|
|
|
|
где P1 - мощность, отдаваемая в сеть или на пассивную нагрузку;
Рэл – потери, покрываемые за счѐт электромагнитной мощности
Рэм Pм ех Рм ех , |
(3.8) |
где Рм ех – механические потери в двигателе.
3.2 Механические и электромеханические характеристики
электропривода с ДПТ НВ
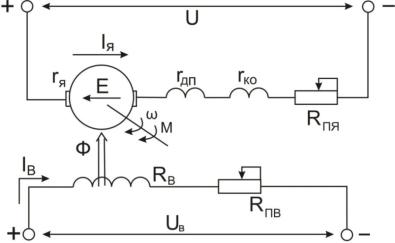
Для получения основных соотношений для простейшей модели электропривода постоянного тока в статических (установившихся) режимах воспользуемся электрической схемой, приведѐнной на рис. 3.2.
Рис. 3.2. Электрическая схема включения электропривода с двигателем постоянного тока независимого возбуждения (ДПТ НВ)
53
Будем считать, что якорь двигателя питается от источника напряжения бесконечно большой мощности. Взаимодействие тока в обмотке
якоря с магнитным потоком Ф , создаваемым обмоткой возбуждения, расположенной на главных полюсах машины, приводит к возникновению электромагнитных сил, действующих на активные проводники обмотки и, следовательно, электромагнитному моменту
М кФI я , |
(3.9) |
где к – конструктивный параметр машины.
Под действием момента М якорь двигателя вращается со скоростью и в проводниках обмотки якоря наводится ЭДС в соответствии
с законом Фарадея |
|
Е кФ , |
(3.10) |
направленная встречно по отношению к току, а значит и напряжению. Уравнение равновесия якорной цепи на основании закона Кирхго-
фа может быть записано в виде |
|
U kФ I я (Rя Rпя ) , |
(3.11) |
где Rя rя rдп rко - полное сопротивление |
якоря двигателя, |
включая сопротивление обмотки добавочных полюсов rдп и компенса-
ционной обмотки rко ;
Rпя - добавочное сопротивление, введѐнное в общем случае в сило-
вую цепь.
Тогда уравнение скоростной (электромеханической) характеристики f (I я ) запишется так
|
|
|
U |
|
|
|
I я Rя |
, |
(3.12) |
||
|
|
|
|
|
|
|
|||||
|
|
kФ |
|
|
kФ |
|
|||||
где Rя = Rя Rпя - полное сопротивление силовой цепи двигателя. |
|||||||||||
С учѐтом того, что |
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
М |
, |
|
|||||
|
я |
|
|
||||||||
|
|
|
|
|
|
kФ |
|
||||
|
|
|
|
|
|
|
|
||||
уравнение механической характеристики двигателя может быть представлено в следующем виде
54
|
U |
|
|
МRя |
. |
(3.13) |
|
|
kФ |
|
kФ 2 |
|
|||
Конструктивный параметр машины постоянного тока определя- |
|||||||
ется по формуле |
|
|
|
|
|
|
|
|
к |
pN |
, |
|
|||
|
|
|
|||||
|
|
|
2 a |
|
|||
где p – число пар главных полюсов;
N 2wя – число активных проводников обмотки якоря; wя - число витков обмотки якоря;
a – число пар параллельных ветвей обмотки якоря.
Эти параметры, а также сопротивления rдп , rя , rко могут быть получены из каталожных данных или клиентского формуляра двигателя.
Величина 0 |
U |
|
определяет скорость идеального холостого |
||||
|
|
||||||
|
kФ |
|
|
|
|
||
хода, которая зависит от |
U и Ф , а величина |
||||||
|
|
|
|
I я Rя |
|
MRя |
|
|
|
|
kФ |
kФ 2 |
|||
|
|
|
|
|
|||
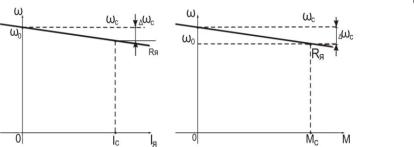
называется статическим падением скорости при действии момента статического сопротивления M c на валу двигателя. Тогда
0
есть уравнение прямой, и может быть представлено графически на рис. 3.3.
Рис. 3.3. Электромеханическая и механическая характеристики без дополнительного сопротивления в силовой цепи
55
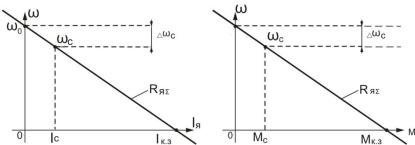
Из уравнений (3.12), (3.13) могут быть получены уравнения характеристик в отрезках на осях (рис.3.4)
|
|
|
|
I я |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|||
0 1 |
|
|
; |
|
|||
|
|
|
|
Iк.з |
|
||
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||
0 1 |
|
|
|
|
|||
|
|
|
М к.з |
|
|||
где Iк .з |
U |
- ток короткого замыкания при 0 ; |
|
Rя |
|||
|
|
М к.з кФI к.з - момент короткого замыкания.
(3.14)
(3.15)
Рис. 3.4. Электромеханическая и механическая характеристики в отрезках на осях
Обратные зависимости I я f ( ) и |
M f ( ) могут быть |
||||||||
получены из (3.14) и (3.15) |
|
|
|
|
|
|
|
||
I я |
0 |
|
Iк.з Iк .з |
|
кФ |
; |
(3.16) |
||
|
0 |
Rя |
|||||||
|
|
|
|
|
|
|
|||
М |
0 |
М к.з М к.з |
кФ 2 |
(3.17) |
|||||
0 |
|
|
Rя |
, |
|||||
|
|
|
|
|
|
|
|||
которые используются при аналитических расчѐтах.
56

Жѐсткость механической характеристики
|
dM |
|
M к .з |
, Нм с |
(3.18) |
|
|
||||
|
d |
|
0 |
|
|
отрицательная величина, что говорит об уменьшении скорости с увеличением нагрузки, и определяется величиной момента короткого замыкания
M к .з кФ U Rя
и скорости идеального холостого хода
0 кФU .
Тогда модуль статической жѐсткости механической характеристики электропривода определяется в следующем виде
с (кФ)2 , (3.19)
Rя
т.е. модуль статической жѐсткости пропорционален квадрату магнитного потока Ф и обратно пропорционален полному сопротивлению якор-
ной цепи привода  .
.
3.3 Естественная характеристика ЭП с ДПТ НВ
Из всего семейства характеристик электропривода с двигателями постоянного тока независимого возбуждения (ЭП с ДПТ НВ) необходимо выделить одну характеристику – естественную, которая определя-
ется при номинальном напряжении  , номинальном магнитном потоке
, номинальном магнитном потоке
 и отсутствием дополнительных внешних сопротивлений
и отсутствием дополнительных внешних сопротивлений  в якорной цепи. Еѐ уравнения записываются в виде
в якорной цепи. Еѐ уравнения записываются в виде
|
|
|
U н |
|
|
I я Rя |
|
; |
(3.20) |
|||
е |
кФн |
|
кФн |
|||||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Uн |
|
|
МRя |
|
, |
(3.21) |
|||
|
|
|
|
|
||||||||
е |
|
кФ |
|
|
(кФ )2 |
|
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
н |
|
|
|
н |
|
|
|
|
|
|
|
|
|
57 |
|
|
|
|
|
|
|
или в другой форме записи |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
I я Rя |
; |
(3.22) |
||
|
|
|
|
е |
он |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
кФн |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
М |
, |
(3.23) |
||
|
|
|
|
е |
он |
|
||||||||
|
|
|
|
|
|
|
|
|
с |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
он |
|
U н |
|
– скорость идеального холостого хода при работе на ес- |
|||||||||
|
|
|||||||||||||
|
|
|
кФн |
|
|
|
|
|
|
|
|
|
||
тественной характеристике; |
|
|
|
|
|
|
|
|
|
|||||
|
с |
кФн |
2 |
|
|
|
|
|
|
|
|
|
||
|
|
Rя |
|
- модуль статической жѐсткости естественной харак- |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
теристики.
Естественная механическая характеристика двигателя даѐт основные представления об электромеханических свойствах двигателя. Она определяет его рабочую номинальную скорость и показывает статическое изменение скорости при изменении нагрузки. Чем выше мо-
дуль жѐсткости с , тем более стабильна работа при широких измене-
ниях M. Другой оценкой стабильности рабочей скорости электропривода при различных моментах нагрузки является статизм механической характеристики
s |
он н 100 % |
н 100 % |
|
||
|
он |
|
|
он |
|
или |
|
|
|
|
|
|
s |
М н |
100 % . |
(3.24) |
|
|
|
||||
|
|
он с |
|
|
|
Таким образом, статизм механической характеристики обратно пропорционален модулю еѐ жѐсткости.
Для сравнения естественных механических характеристик различных двигателей с независимым возбуждением и обобщѐнной формой записи уравнений широко используется система относительных
единиц. В качестве базовых величин обычно принимаются U н , I н ,
58
Ф |
, |
R |
Uн |
, |
0 н |
, |
M |
н |
, при этом уравнения (3.12), (3.13) в относи- |
||||||||||||||
|
|||||||||||||||||||||||
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
н |
Iн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тельных единицах имеют следующий вид: |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rя * |
I |
|
|
(3.25) |
||||
|
|
|
|
|
|
|
|
|
е |
о* |
|
|
я* |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф* |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rя * |
М |
|
|
, |
(3.26) |
|||
|
|
|
|
|
|
|
|
|
о* |
|
|
* |
|||||||||||
|
|
|
|
|
|
|
|
|
* |
|
|
|
|
Ф2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
|
|
|
|
|
||
здесь  ,
,  =
= ,
,  ,
,  =
= ,
,
 ,
,  .
.
Уравнения естественных электромеханических и механических характеристик в относительных единицах могут быть получены из (3.25)
и (3.26) при |
; |
; |
|
|
|
* 1 Rя* I я* ; |
(3.27) |
|
|
* 1 Rя*М* . |
(3.28) |
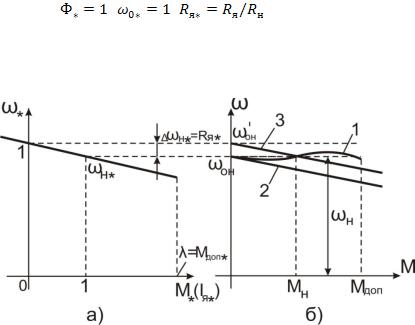
На рис. 3.5 приводятся естественные механические характеристики ЭП с ДПТ с НВ.
Рис. 3.5. Естественные характеристики компенсированных (а) в относительных единицах и некомпенсированных (б) ДПТ с НВ в абсо-
лютных единицах
59