

6.4. Алгоритмы преобразования кажущихся ускорений и выработки параметров поступательного движения
Задача преобразования кажущихся
ускорений в рассматриваемых БИИМ
формулируется как задача нахождения
проекций
![]() вектора
вектора![]() на оси географического сопровождающего
трехгранника
на оси географического сопровождающего
трехгранника![]() по информации об измеренных акселерометрами
составляющих
по информации об измеренных акселерометрами
составляющих![]() вектора
вектора![]() в осях связанного с ИБ трехгранника
в осях связанного с ИБ трехгранника![]() и по вычисленной в задаче ориентации
матрице
и по вычисленной в задаче ориентации
матрице![]() ,
определяющей взаимную ориентацию
трехгранников
,
определяющей взаимную ориентацию
трехгранников![]() и
и![]() .
Это преобразование осуществляется в
соответствии с матричным соотношением:
.
Это преобразование осуществляется в
соответствии с матричным соотношением:
![]() или
или (6.41)
(6.41)
Отметим, что полученные проекции согласно
![]() будут равны:
будут равны:
![]()
![]()
![]() (6.42)
(6.42)
где составляющие «вредных» ускоренийопределяются выражениями
![]()
![]() (6.43)
(6.43)
![]()
![]() - проекции вектора действительной силы
тяжести на соответствующие оси
географического сопровождающего
трехгранника
- проекции вектора действительной силы
тяжести на соответствующие оси
географического сопровождающего
трехгранника![]() .
.
В блоке выработки параметров поступательного
движения осуществляется вычисление
“вредных”
![]() ускорений в соответствии с (6.43), задаваясь
формой и размерами Земли, и привлекается
априорная модель
ускорений в соответствии с (6.43), задаваясь
формой и размерами Земли, и привлекается
априорная модель![]() ускорения силы тяжести Земли. Затем
осуществляется их компенсация в
составляющих (6.42) кажущегося ускорения
и вычисление составляющих вектора
линейной скорости и координат места
объекта по следующим алгоритмам:
ускорения силы тяжести Земли. Затем
осуществляется их компенсация в
составляющих (6.42) кажущегося ускорения
и вычисление составляющих вектора
линейной скорости и координат места
объекта по следующим алгоритмам:




 (6.44)
(6.44)
(здесь
![]() ).
).
При этом вычисление радиусов кривизны
нормальных сечений принятого эллипсоида
вращения осуществляется по формулам
(6.14), а компенсация составляющих ускорения
вектора
![]() действительной силы тяжести, представляющего
собой сумму вектора
действительной силы тяжести, представляющего
собой сумму вектора![]() (
(![]() )
нормальной силы тяжести и вектора
)
нормальной силы тяжести и вектора![]() аномалий гравитационного поля Земли,
может осуществляться следующим образом:
аномалий гравитационного поля Земли,
может осуществляться следующим образом:
вычисляется проекция нормальной силы тяжести на геодезическую вертикаль (ось
 ),
равная величине
),
равная величине ,
по формуле (1.33) (см. Л1 раздела1);
,
по формуле (1.33) (см. Л1 раздела1);если возможно, учитываются известные составляющие уклонения отвесной линии(УОЛ) ианомалии силы тяжестив соответствии с формулами (см. Л1 раздела1):
![]()
![]()
![]() (6.45)
(6.45)
где
![]() - восточная и северная составляющие
УОЛ;
- восточная и северная составляющие
УОЛ;![]() - аномалия силы тяжести;
- аномалия силы тяжести;![]() ,
здесь
,
здесь![]() - погрешность формирования ускорения
нормальной
- погрешность формирования ускорения
нормальной![]() силы тяжести.
силы тяжести.
6.5. Примеры построения зарубежных и отечественных систем
БИНС на электростатических гироскопах - N2000
Отделение MARINE SYSTEM DIVISION американской фирмы "ROCKWELL AUTONETICS" разработало корабельную БИНС, получившию название "N2000". Основой системы является инерциальный измерительный блок (ИИБ), содержащий два электростатических гироскопа и три акселерометра. Каждый из гироскопов представляет собой бериллиевый шар диаметром 10 мм, вращающийся со скоростью около 150000 об/мин.
Навигационная система N2000 относится к классу бесплатформенных ИНС на позиционных гироскопах. По сравнению с БИНС, построенных на базе ДУС, преимущество системы N2000 состоит в том, что в ней для получения данных об угловой ориентации объекта не требуется производить интегрирование вектора его угловой скорости, что исключает один из источников погрешностей, связанных с численным интегрированием кинематических уравнений. Эти данные в системе N2000 получают путем измерений и дальнейших преобразований углов между связанной с ИИБ системой координат и направлениями в инерциальном пространстве кинетических моментов бескарданных ЭСГ.
Конструкция системы N2000 удовлетворяет военно-морским стандартам, относящимся к корабельным ИНС. Для повышения точностных характеристик системы предусмотрено непрерывное вращение корпуса ИИБ вокруг оси, перпендикулярной палубе. Этим достигается наблюдаемость различных составляющих инструментальных погрешностей чувствительных элементов (ЧЭ) ИИБ при их калибровке, например, в обсервационном режиме работы БИНС, а также автокомпенсация некоторых составляющих погрешностей ИИБ, связанных, в частности, с неточной ориентацией ЧЭ в корпусе ИИБ и так называемыми корпусными дрейфами ЭСГ, в автономном режиме работы системы.
Для изоляции ИИБ от поступательных и угловых вибраций корпуса корабля в системе применен низкочастотный с шестью степенями свободы высокоэластичный упругий подвес, который допускает малые повороты и поступательные смещения ИИБ относительно корпуса корабля. Точное и непрерывное определение углового положения ИИБ относительно осей корабля обеспечивается посредством прецизионной системы электронно-оптического списывания информации. Эта система включает в себя три оптических датчика в антиударном исполнении, входящих в состав ИИБ, и три зеркала, установленных с внутренней стороны антиударного подвеса, непосредственно прикрепленного к корпусу корабля. Оптические датчики списывания данных состоят из источника света, системы линз, фотодиодов, электроники синхронизации и обработки сигналов. Системы списывания и антиударного подвеса, имеют сравнительно незначительную стоимость, обусловленную внедрением современной технологии в производстве микропроцессоров, успешно прошли испытания на тряску и удар, результаты которых удовлетворяют требованиям военно-морских стандартов MIL-S-901C и MIL-STD- 167.
Конструктивное исполнение системы N2000 может быть различным за счет того, что ИИБ с антиударным подвесом и блок электроники выполнены в виде отдельных модулей. Это позволяет иметь конструкцию N2000 либо в виде единой стойки либо с разнесенными модулями. Разработчиками также рассматривался вариант конструкции сдвоенной системы в виде двух отдельных ИИБ и двух блоков электроники. Энергообеспечение системы N2000 осуществляется непосредственно от корабельной сети. Резервное питание обеспечивается батареей, встроенной в систему. Модульный блок электроники ввода-вывода обеспечивает выработку входных и выходных дискретных и синхросигналов для сопряжения ИНС с другими корабельными системами. В первоначальных вариантах конструкции системы был использован интерфейсный блок электроники, удовлетворяющий стандарту SHIPS-G-5795.
Конструкция ИИБ, представленная на рис. 6.12, предполагает использование электронных плат с односторонним монтажом элементов.
Блок, состоящий из двух ЭСГ и трех
электромагнитных акселерометров (ЭМА),
вращается вокруг оси, перпендикулярной
палубе, в диапазоне
![]() град. В конструкцию вращающегося блока
чувствительных элементов, представленную
на рис.6.13, введены два гибридных
микромодуля, причем один модуль
предназначен для питания гироскопов,
а второй - для питания ЭМА.
град. В конструкцию вращающегося блока
чувствительных элементов, представленную
на рис.6.13, введены два гибридных
микромодуля, причем один модуль
предназначен для питания гироскопов,
а второй - для питания ЭМА.
Гироскопы подсоединяются в схему посредством штепсельного разъема, что позволяет исключить использование проводов. Конструкция блока ЭМА, которые используются в БИНС N2000, включает в себя интегральную дискретную электронику. Данные об ускорении снимаются с выхода ЭМА в виде последовательных импульсов. В процессе разработки вращающегося блока были выбраны оптимальные режимы вращения корпусов гироскопов, не требующие введения каких-либо дополнительных механических элементов. Вращение этого блока позволяет снизить погрешности от неточной ориентации корпуса.
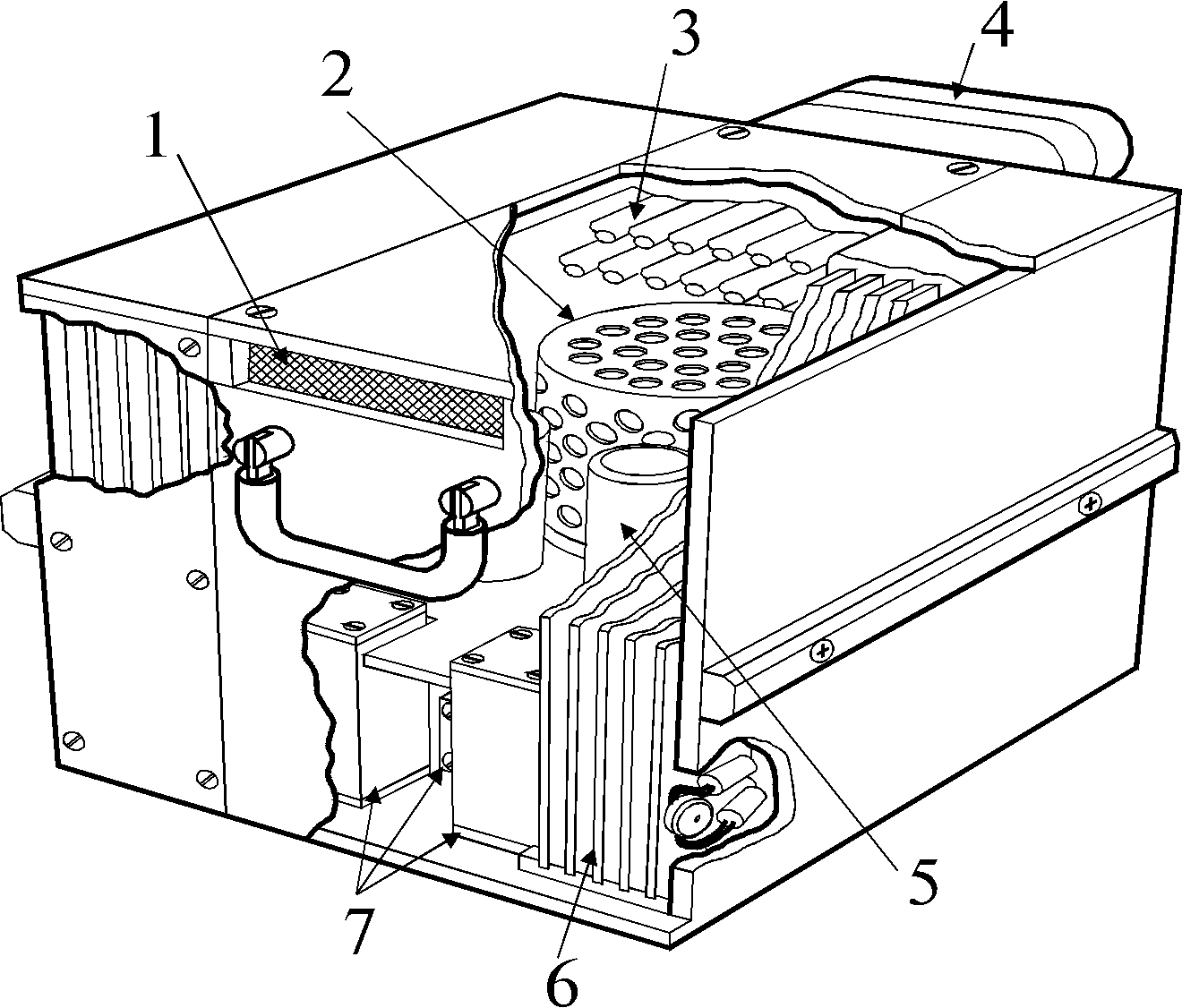
Рис.6.12. Конструкция ИИБ N2000
1 - отверстия для выпуска воздуха; 2 - вращающийся блок; 3 - воздушный теплообменник; 4 - отверстия для впуска воздуха; 5 - синусно-косинусный преобразователь; 6 - электронные платы; 7 - оптические датчики списывания в антиударном исполнении.

Рис.6.13. Конструкция вращающегося блока чувствительных элементов
1 - кожух; 2 - блок усилителей (2 шт.); 3 - блок питания ЭМА; 4 - блок ЭМА; 5 - ЭМА (3 шт.); 6 - блок ЭСГ; 7 - ЭСГ (2 шт.); 8 - противоударный амортизатор; 9 - подшипник; 10 - опорная плата с двигателем и преобразователем; 11 - привод; 12 - амортизатор
ЭСГ представляет собой трехстепенной неуправляемый гироскоп с двумя измерительными осями. Конструкция гироскопа, представленная на рис.6.14, включает в себя только три прецизионных элемента: ротор и две половинки (полусферы) вакуумной камеры. Бериллиевый ротор весит 1 г и в диаметре имеет 10 мм. Для обеспечения радиального дебаланса массы, позволяющего определять угловую ориентацию оси собственного вращения ротора, в бериллиевую заготовку, из которой изготавливается ротор, внедряются танталовые проволочки. Вакуумная камера гироскопа, выполненная в виде полых половинок (полусфер), сделана из окиси бериллия. Каждая из полусфер разделена на четыре равные части, составляющие восьмую часть сферы. Эти пластины покрыты гальваническим никелем и вместе с ротором образуют 4/8 сферического конденсатора. В процессе работы гироскопа быстровращающийся ротор поддерживается электростатическим полем. Если ротор и полости будут иметь форму идеального шара, а балансировка ротора будет идеальной, то практически можно исключить вредные моменты.

Рис.6.14. Конструкция ЭСГ:
1– кожух;2– обмотка для создания момента;3– вакуумные отверстия;4– электроды;5– верхняя полусфера;6– ротор;7– нижняя полусфера;8– поддерживающее кольцо;9крышка
Для создания вращающегося электромагнитного поля статор гироскопа представляет собой систему из трех ортогональных обмоток, расположенных вокруг внешней полости, которые используются для запуска, торможения, а также демпфирования нутационных колебаний оси вращения ротора. В результате разгона и демпфирования нутационных колебаний ось собственного вращения ротора гироскопа ориентируется вдоль его главной оси. В установившемся режиме работы ЭСГ стабильность вращения его ротора обеспечивается без использования разгонного статора.
Электроника ЭСГ выполняет три основные функции:
управление напряженностью электростатического поля;
списывание положения ротора;
регулирование скорости вращения ротора.
Функция списывания состоит в определении положения вектора угловой скорости собственного вращения ротора в системе координат, связанной с корпусом гироскопа. Управление скоростью вращения ротора необходимо для обеспечения постоянного значения этой скорости.
После запуска системы ротор разгоняется до скорости, соответствующей 2500 Гц. Положение оси собственного вращения ротора гироскопа однозначно определяет диаграмму модуляции сигналов электродов. Данные сигналы демодулируются, фильтруются и поступают на предварительный процессор ИИБ, который рассчитывает направляющие косинусы вектора угловой скорости собственного вращения ротора гироскопа в связанной с его корпусом системе координат.
Применение новой электроники в системе N2000 нашло свое отражение в микропроцессоре. В состав микропроцессора входят блок памяти, интерфейс, схема синхронизации, линия связи и буфер. Предполагается построение микропроцессора в виде трех процессоров. Один из них устанавливается в ИИБ и служит в качестве управляющего устройства (контроллера), второй и третий устранавливаются в стойке, причем один из них выполняет функции навигационного процессора, а другой - встроенного блока контроля и организационного управляющего процессора. Контроллер ИИБ выполняет также такие функции, как обработка выходных сигналов оптического датчика списывания, преобразование дискретных данных в синусно-косинусном преобразователе и управление вводом-выводом дискретных данных.
При выборе блока микропроцессора большое внимание было уделено экономическим вопросам. Выбранный блок составляет основу микропроцессорного чипа марки "MOTOROLA MC 68000", который отличается высокой пропускной способностью и конструкция которого обеспечивает удобство программирования и возможностью использования языков высокого уровня. Память микропроцессора включает в себя универсальную постоянную и программируемую постоянную память. Программируемая логическая матрица с программируемой постоянной памятью включает в себя отображение памяти и при наличии некоторой дополнительной логики обеспечивает сопряжение памяти, согласуемое с микропроцессорным чипом. Для обеспечения одноканального сопряжения с программируемой скоростью (max 9600 бод) наряду с адаптером для сопряжения с синхронными каналами связи используются буфера RS-232.
Предусмотрено несколько режимов работы системы N2000:
Режим начальной выставки, который включает в себя предварительный прогрев, автономную проверку блоков системы, всплытие и разгон роторов гироскопов, демпфирование их нутационных колебаний, а также выставку ИНС (горизонтирование и гирокомпасирование).
Навигационный режим работы, который является основным и включает в себя автономный инерциальный режим, демпфируемый инерциальный режим, а также режим работы в полярных областях.
Обсервационный режим работы, в котором используются данные спутниковой навигационной системы GPS.
Отметим, что реализация обсервационного режима работы осуществляется в системе N2000 посредством выработки соответствующих поправок фильтром Калмана с 22 переменными состояния.
При создании опытного образца системы N2000 значительное внимание уделялось вопросам калибровки основных инструментальных погрешностей чувствительных элементов на стенде. Калибровку предполагалось проводить в два уровня. Калибровка первого уровня осуществляется автономно для блока акселерометров и гироскопов. Причем модель погрешностей блока акселерометров включает 12 коэффициентов, которые выражают нестабильность нуля и масштабного коэффициента, а также два коэффициента, характеризующие неточную ориентацию оси чувствительности ЭМА относительно блока акселерометров. Автономная калибровка ЭСГ осуществляется раздельно для 56 коэффициентов, характеризующих погрешности углового списывания, и 38 коэффициентов модели дрейфа ЭСГ. Калибровка второго уровня предполагает одновременный съем данных ИИБ (ЭСГ и блока акселерометров) при различных положениях поворотного стола, на котором он установлен, сравнение данных ЭМА с данными ЭСГ и соответствующее уточнение некоторых коэффициентов модели инструментальных погрешностей гироскопов, полученных при калибровки первого уровня. В целях повышения эффективности и снижения стоимости системы процесс калибровки полностью автоматизирован, а использование подходов калибровки второго уровня в процессе эксплуатации системы обеспечивает также улучшение технических характеристик ИНС, работающей длительное время.
Согласно данным фирмы "ROCKWELL AUTONETICS DIV." высокая надежность, сравнительно низкая стоимость, соответствие технических характеристик требованиям ВМС обусловят перспективное оснащение кораблей бесплатформенными инерциальными навигационными системами N2000.
Однако следует отметить, что до настоящего времени система N2000 не нашла широкого применения на кораблях. Представляется, что это вызвано значительным уровнем погрешностей системы в выработке динамических параметров (составляющих вектора линейной скорости, угловых скоростей качки и рыскания и т.д.), необходимых для обеспечения начальной выставки и калибровки бортовых систем комплексов оружия. Эти погрешности обусловлены прежде всего существенными погрешностями систем списывания углового положения роторов ЭСГ и влиянием динамических возмущений (вибраций и т.п.) на уходы ЭСГ из-за наличия радиального дебаланса их роторов.
БИНС на лазерных гироскопах. Современное состояние
A. ЛГ
Метод виброподставки заключающийся в осуществлении принудительного покачивания ЛГ вокруг его оси чувствительности с частотой порядка 200 – 400 Гц и амплитудой несколько угловых минут. Основная идея метода состоит в том, что большую часть времени ЛГ находится вне зоны захвата и способен реагировать на входную угловую скорость любой величины. Такой подход к решению проблемы позволяет снизить минимальную угловую скорость, измеряемую с помощью ЛГ до величин, которые определяются его шумовыми характеристиками. Метод виброподставки оказался очень эффективным и широко используется в настоящее время. К недостаткам метода виброподставки следует отнести:
многократное прохождение через зону захвата, приводящее к росту случайного дрейфа ЛГ;
появление дополнительной нелинейности масштабного коэффициента;
генерация значительных акустических и механических колебаний;
реакция колебательных движений ЛГ на основание, где он установлен;
появление перекрестных связей в трехосных конструкциях чувствительных элементов.
Метод вращения ЛГ на большие
углы(порядка![]() )
с периодическим «мгновенным» реверсом
(так называемая rate-bias техника). С точки
зрения общей концепции данный метод
мало отличается от метода виброподставки.
Однако при его использовании существенно
уменьшается число проходов через зону
захвата в единицу времени, и благодаря
этому значительно (почти на порядок)
уменьшается случайный дрейф ЛГ. Тем не
менее, использование rate-bias техники
требует установки ЛГ на поворотную
платформу, что увеличивает габариты,
энергопотребление и чувствительность
к вибрациям.
)
с периодическим «мгновенным» реверсом
(так называемая rate-bias техника). С точки
зрения общей концепции данный метод
мало отличается от метода виброподставки.
Однако при его использовании существенно
уменьшается число проходов через зону
захвата в единицу времени, и благодаря
этому значительно (почти на порядок)
уменьшается случайный дрейф ЛГ. Тем не
менее, использование rate-bias техники
требует установки ЛГ на поворотную
платформу, что увеличивает габариты,
энергопотребление и чувствительность
к вибрациям.
Создание четырехчастотных ЛГ.
Принципиальным отличием четырехчастотного ЛГ от двухчастотного является то, что в четырехчастотных ЛГ осуществляется генерация волн с круговой поляризацией. Причем в каждом из направлений распространения генерируются две волны с правой и левой круговыми поляризациями .
По существу можно сказать, что в этом случае в одном резонаторе одновременно реализуются два кольцевых лазера. Разделение волн с левой и правой круговой поляризацией может осуществляться посредством помещения в резонатор элемента, обладающего оптической активностью. В этом случае оптическая длина периметра для волн с левой и правой круговыми поляризациями становится неодинаковой и возникает расщепление по частоте волн, распространяющихся в одном направлении. Другим способом их разделения по частоте является использование неплоского или «сломанного» резонатора. Такой способ является предпочтительным, так как в данном случае отпадает необходимость размещения в резонаторе элемента, вносящего дополнительный вклад в потери и анизотропию резонатора.
Зона захвата для каждой пары волн сохраняется. Для ее исключения в резонаторе четырехчастотного ЛГ размещается элемент Фарадея (фарадеевский вращатель), который создает начальное расщепление частот для каждой пары волн с разными круговыми поляризациями. Чрезвычайно важным фактором при этом является то, что начальные расщепления для разных круговых поляризаций имеют один и тот же знак, в то время как расщепление, обусловленное вращением ЛГ, имеет разные знаки для разных круговых поляризаций, т.е. для одного кольцевого лазера разность частот встречных волн

где
![]() – начальное фарадеевское расщепление.
Регистрация разности частот в каждом
из лазеров и последующее вычитание
одного расщепления из другого позволяет
полностью скомпенсировать начальное
фарадеевское смещение
– начальное фарадеевское расщепление.
Регистрация разности частот в каждом
из лазеров и последующее вычитание
одного расщепления из другого позволяет
полностью скомпенсировать начальное
фарадеевское смещение![]() .
При этом величина разности частот за
счет вращения удваивается, что эквивалентно
удвоению масштабного коэффициента.
Фарадеевское расщепление может быть
осуществлено наложением магнитного
поля непосредственно на активную среду.
.
При этом величина разности частот за
счет вращения удваивается, что эквивалентно
удвоению масштабного коэффициента.
Фарадеевское расщепление может быть
осуществлено наложением магнитного
поля непосредственно на активную среду.
Дополнительные системы ЛГ, без которых невозможно было бы достигнуть высоких точностных характеристик. Среди таких систем необходимо отметить следующие:
система стабилизации мощности излучения, поддерживающая неизменной постоянную составляющую интенсивности одного из выходных лучей ЛГ либо амплитуду сигнала биений встречных волн ЛГ;
система стабилизации периметра резонатора, поддерживающая постоянной оптическую длину периметра резонатора ЛГ за счет удержания одной из генерируемых волн на вершине линии усиления активной среды. Стабилизация осуществляется в зеркальных резонаторах с помощью перемещения одного из зеркал резонатора пьезоэлементом. В призменных резонаторах используется изменение температуры в одном из каналов ЛГ, заполненных пассивной газовой средой;
система минимизации влияния обратного рассеяния, регулирующая положение еще одного из зеркал резонатора таким образом, чтобы глубина модуляции за счет обратного рассеяния каждой из встречных волн на частоте биений была бы минимальной.
Чрезвычайно важным для работы ЛГ является качество зеркал с точки зрения величины обратного рассеяния и потерь в резонаторе. Именно успехи в этой области, обусловленные значительным прогрессом в технологии, обеспечили существенное повышение точностных характеристик ЛГ.
Использование в качестве материала резонатора стеклокерамики с чрезвычайно низким (порядка 10-9) коэффициентом теплового расширения, обеспечение высокой стабильности тока разряда при возбуждении активной среды постоянным током и ряд других факторов позволили создать ЛГ с достаточно высокой точностью, обеспечить их конкурентноспособность по отношению к традиционным гироскопам.
Основными параметрами, характеризующими точность работы ЛГ, являются следующие:
масштабный коэффициент, определяющий разрешение ЛГ;
стабильность и нелинейность масштабного коэффициента;
сдвиг нуля выходной характеристики или дрейф ЛГ (обычно определяют постоянную составляющую этого параметра и его нестабильность от запуска к запуску);
случайный дрейф ЛГ, являющийся результатом интегрирования белого гауссового шума разности фаз выходного сигнала ЛГ. Основными источниками белого шума являются спонтанное излучение активной среды и многократный проход через зону захвата при использовании виброподставки и rate-bias техники.
Случайный дрейф ЛГ
Одним из основных источников навигационных
погрешностей является случайный дрейф
ЛГ. В БИНС он вызывает погрешность
определения углового положения,
непосредственно влияет на время начальной
выставки и погрешность скорости. В
качестве примера укажем, что при уровне
остаточного случайного дрейфа ЛГ порядка
0,001 град/![]() («зашумленная виброподставка») курсовая
погрешность составляет приблизительно
48 угл.с за время выставки 10 мин на широте
45.
(«зашумленная виброподставка») курсовая
погрешность составляет приблизительно
48 угл.с за время выставки 10 мин на широте
45.
Важная составляющая суммарной погрешности ЛГ связана со смещением нуля выходной характеристики. После калибровки ЛГ и составления модели дрейфа годовая стабильность для серийно выпускаемых гироскопов оценивается величиной менее 0,004 град/ч. Отметим основные факторы, влияющие на нестабильность смещения нуля ЛГ:
нестабильность оптических осей зеркал и их эрозия;
газовыделение внутри моноблока ЛГ;
погрешности регулировки периметра;
нестабильность поддержания усиления активной среды для баланса интенсивностей встречных волн;
погрешности стабилизации амплитуды и частоты виброподставки.
Тепловой дрейф
Если в БИНС на ЛГ не применяется термостатирование, то, несмотря на разработку и широкое использование специальных типов стеклокерамики со сверхмалыми коэффициентами относительного линейного расширения (до 10-8и лучше), температурные деформации резонатора приводят к явлениям, аналогичным дрейфу нуля ЛГ. Для учета температурных смещений в процессе калибровки строится температурная модель.
Чувствительность к магнитным полям
Специфической является погрешность ЛГ, порождаемая внешним магнитным полем. Ее природа обусловлена эффектом Фарадея, который проявляется в оптико-физических схемах ЛГ, где поляризация встречных волн не является строго линейной. Наименьшей чувствительностью к внешним магнитным полям обладают зеркальные ЛГ с планарным ходом лучей в резонаторе. Для них чувствительность к магнитным полям оценивается величиной до 0,001...0,002 град/чпри магнитном экранировании. Существенно хуже эти показатели у четырехчастотных и призменных ЛГ.
Конструкции резонатора ЛГ.К потенциальной точности в наибольшей степени позволяют приблизиться ЛГ с зеркальной конструкцией резонатора. Но это возможно только при условии освоения уникальной технологии изготовления многослойных диэлектрических зеркал. Их лучшие образцы сегодня характеризуются потерями порядка 310-6, что обеспечивает значительное увеличение добротности резонатора и снижение зоны захвата. Однако стоимость таких зеркал весьма высока и в значительной степени определяет цену ЛГ (до 25% полной стоимости). В противоположность зеркальным конструкциям ЛГ с призменными отражателями не требуют столь высоких технологий, не используют диэлектрических покрытий для призм полного внутреннего отражения и более устойчивы к воздействию разряда. Потенциально ЛГ с призмами полного внутреннего отражения позволяют приблизиться по стоимости к волоконно-оптическим гироскопам, существенно превосходя их по точности.
Возбуждение разряда в активной среде.Наибольшее распространение за рубежом получили конструкции ЛГ с разрядом на постоянном токе, однако они требуют высоких напряжений, дифференциальных схем включения источников разряда и использования вводимых в полость резонатора металлических анодов и катода. Серьезные проблемы возникают из-за воздействия разряда на диэлектрические покрытия зеркал. От этих недостатков свободны ЛГ, в которых используется высокочастотный разряд. Такие решения оправдали себя в отечественных призменных конструкциях благодаря следующим достоинствам:
отсутствие сдвига нуля из-за направленного движения активной среды (эффект Лэнгмюра);
увеличение срока службы благодаря отсутствию металлических электродов в каналах резонатора ЛГ;
уменьшение числа контактов металл-стеклокерамика;
малые шумы разряда, отсутствие страт;
низкое напряжение питания (15 – 24 В);
малые масса и габариты источника накачки (высокочастотного генератора).
Системы регулировки периметра
резонатора ЛГ.Наиболее просто задача
регулировки периметра решается в
зеркальных конструкциях, где одно или
два зеркала устанавливаются на
пьезокерамику и под воздействием
управляющего напряжения варьируется
периметр![]() .
В призменных конструкциях ЛГ применение
пьезокерамики затруднительно, и здесь
используется одно из пассивных плеч
резонатора, заполненное газообразной
средой. Управляющее воздействие меняет
коэффициент преломления газа, например,
путем нагревания его, что приводит к
изменению коэффициента преломления в
одном из каналов и, как следствие,
вызывает изменение оптической длины
резонатора.
.
В призменных конструкциях ЛГ применение
пьезокерамики затруднительно, и здесь
используется одно из пассивных плеч
резонатора, заполненное газообразной
средой. Управляющее воздействие меняет
коэффициент преломления газа, например,
путем нагревания его, что приводит к
изменению коэффициента преломления в
одном из каналов и, как следствие,
вызывает изменение оптической длины
резонатора.
Б. Авиационные БИНС на ЛГ. Фирмы США и Западной Европы
В настоящее время разработкой и созданием ЛГ и БИНС на ЛГ занимается целый ряд крупных фирм США и Западной Европы, таких как "LITTON", "HONEYWELL", "SINGER", "BRITISH AEROSPACE", "SAGEM", "LITEF", "SFENA", "FERRANTI" и др. [2, 76]. Признанными лидерами являются американские компании "LITTON" и "HONEYWELL", первые работы которых по ЛГ относятся к началу 60-х годов. Фирма "HONEYWELL" имеет завод производительностью 200 - 220 лазерных гироскопов в месяц, где с начала 80-х годов осуществляется серийное производство гироскопов GG-1300 и GG-1342, используемых в БИНС H-421, H-423, H-770 и инерциальных курсовертикалях (ИКВ) в основном для военной авиации. На пассажирских и транспортных самолетах гражданской авиации устанавливаются больше всего лазерные БИНС фирмы "LITTON", такие как LTN-90. Точность лазерных БИНС, поставляемых фирмами "HONEYWELL" и LITTON", составляет от 1,5 м.мили за 1 ч полета до 0,2 м.мили за 1 ч. Некоторые характеристики наиболее распространенных авиационных БИНС на ЛГ показаны в табл.П1, составленной по приведенным в зарубежных публикацииях данным.
|
Фирма |
Марка БИНС, ЛГ |
Точностные характеристики |
Массо-габаритные характеристики |
Время наработки на отказ, ч |
|
|
БИНС Lasernav |
3,5 км за 1 ч |
ИИБ: 21,1 кг
(без блока управления) |
|
|
Honeywell (США) |
БИНС Н-423 |
1,5 км за 1 ч |
ИИБ: 8,2 кг
|
3100 |
|
|
ЛГ GG-1300 |
Стабильность дрейфа в пуске и от пуска к пуску 0,01 град/ч |
|
24000 |
|
|
БИНС LTN-90 |
3,7 км за 1 ч |
ИИБ: 19,9 кг 322194318мм |
|
|
Litton (США) |
БИНС LN-93 |
0,9 км за 1 ч |
|
|
|
|
ЛГ LG-8028 |
|
|
|
|
Singer |
ЛГ T-24 (TRILAG) |
2,4 км за 1 ч |
Вмещается в сферу
|
|
|
(США) |
ЛГ Т-40 |
1,9 км за 1 ч |
Вмещается в сферу
|
|
|
British Aerospace |
БИНС LINS-300 |
1,8 км за 1 ч |
ИИБ
|
2000 |
|
(Англия) |
ЛГ |
0,01 град/ч |
|
|
|
SFENA |
БИНС Totem |
1,8 км за 1 ч |
|
|
|
(Франция) |
ЛГ G-33 |
0,01 град/ч |
- |
|
|
|
|
|
|
|
|
SAGEM |
БИНС Sigma RL90 |
0,9 км за 1 ч |
ИИБ: 18 кг
|
|
|
(Франция) |
ЛГ GLS-32 |
0,002 град/ч |
|
|
В. Корабельные БИНС на ЛГ.
БИНС Mk.49
На вооружение кораблей стран НАТО, Австралии и др.в 1990 году поступила в качестве стандартной навигационной системы бесплатформенная ИНС на ЛГ Мк.49 (AN/WSN-7) разработки фирм SPERRY и HONEYWELL (США). Лазерные гироскопы GG-1342 с вибрационной частотной подставкой фирмы HONEYWELL и серийные кварцевые акселерометры Q-2000 фирмы SUNDSTRAND, используемые в БИНС Mk.49, выпускаются большими партиями. Они имеют хорошие эксплуатационные данные. Среднее время наработки на отказ ЛГ GG-1342 составляет порядка 60...…90 тыс. часов. Микропроцессор NATIONAI SEMICONDUCTOR 32016 с плавающей запятой, примененный в БИНС, позволяет писать программы на языке высокого уровня, что дало возможность сократить затраты на разработку, а также быстро и гибко осуществлять модификацию математического обеспечения. Расширенная программа блока обнаружения неисправностей обеспечивает автономную диагностику с указанием конкретного неисправного блока. Обеспечен свободный доступ ко всем элементам системы. Каждый гироскоп и акселерометр можно заменять в море без последующей калибровки, что значительно сокращает эксплуатационные расходы.
БИНС Mk.49 комплектуется в отдельной
стойке, в нижней части которой размещается
ИИБ, а в верхней - блок электроники,
обеспечивающий его работу и управление
приводом вращения, микропроцессор,
интерфейс, а также батарея аварийного
питания, дисплей и панель управления.
В стойке предусмотрены резервные гнезда
печатных плат для различных вариантов
цифроаналоговых преобразователей и
устройств ввода-вывода. Общие размеры
прибора составляют
![]() мм, углы закруглены, что обеспечивает
свободное прохождение прибора через
люк диаметром 635 мм и стандартные проемы
дверей. Вес всей стойки составляет около
317 кг, а средняя мощность рассеяния
меньше 300 Вт. Из конструкции системы
исключены вентиляция, подвод охлаждающей
жидкости и воздушные фильтры, так как
ребра шкафа и другие конструктивные
устройства обеспечивают теплоотвод в
шкафу для поддержания температуры не
выше 500С, что соответствует
военно-морским требованиям.
мм, углы закруглены, что обеспечивает
свободное прохождение прибора через
люк диаметром 635 мм и стандартные проемы
дверей. Вес всей стойки составляет около
317 кг, а средняя мощность рассеяния
меньше 300 Вт. Из конструкции системы
исключены вентиляция, подвод охлаждающей
жидкости и воздушные фильтры, так как
ребра шкафа и другие конструктивные
устройства обеспечивают теплоотвод в
шкафу для поддержания температуры не
выше 500С, что соответствует
военно-морским требованиям.
Обеспечение требуемой точности корабельных БИНС на ЛГ неразрывно связано с использованием различных методов автокомпенсации инструментальных погрешностей чувствительных элементов. Различные способы автокомпенсации уже давно применяются в инерциальных системах и практически подтвердили свою высокую эффективность. В рассматриваемой БИНС Mk.49 используется двухосное устройство вращения, которое периодически разворачивает ИИБ на 180 град. вокруг оси рыскания, являющейся внутренней осью подвеса, и вокруг оси бортовой качки, являющейся наружной осью подвеса. В системе был разработан специальный 16 фазовый цикл последовательности разворотов, который осуществляет полное осреднение всех постоянных источников погрешностей при наличии только собственного вращательного движения. Для уменьшения влияния внешних вращательных движений во время интервалов между разворотами в устройстве автокомпенсации, в которое входят датчики углов (двухотсчетные сельсины) и датчики моментов, предусмотрена возможность пространственной стабилизации ИИБ. При этом от датчиков углов не требуется высокой точности, поскольку эта информация не используется для выработки координат места и составляющих линейной скорости. Кроме того, возможность стабилизации в азимуте обеспечивает независимость эффективности автокомпенсации от маневрирования корабля.
Одним из недостатков всех известных способов автокомпенсации с помощью вращения является то, что вследствие невыставок ЧЭ и погрешностей масштабных коэффициентов имеют место так называемые "пилообразные" составляющие погрешности выработки линейной скорости, которые позволяют наблюдать погрешность масштабного коэффициента при известной скорости движения корабля. В случае недопустимости таких погрешностей выработки составляющих вектора линейной скорости корабля (например, при выставке бортовых систем ракетного оружия или палубной авиации) в БИНС Mk.49 предусмотрена возможность временного отключения вращения.
Общий вид БИНС Mk.49представлен на рис. 6.15, а основные технические характеристики в табл.2 [http://www.sperry-marine.com].
Таблица 2
|
Характеристика |
Значение |
|
1 |
2 |
|
Точность выработки курса |
|
|
Точность выработки углов бортовой и килевой качек |
|
|
Точность хранения координат |
|
|
Масса |
381 кг (840 Фунтов.) |
|
Высота |
169.7 cm (66.8 дюймов) |
|
Ширина |
59.7 cm (23.5 дюйма) |
|
Глубина |
73.3 cm (28.9 дюймов) |
|
Потребляемая мощность |
600 Вт |
|
Температура хранения Рабочая температура |
от -40 до +70оС от 0 до +50оС |

Рис.6.15. Общий вид БИНС Мк.49
Для коррекции системы привлекаются данные GPS и КЭНС, использующих карты рельефа дна, аномалий гравитационного и возможно магнитного полей Земли. Данная БИНС включена также в качестве основной навигационной системы и в состав НО перспективных многоцелевых пл. Стоимость данной БИНС составляет порядка 300 тыс. долл. США.
БИНС на лазерных гироскопах - PL41, MK4
Фирмой LITEF (дочернее отделение в ФРГ фирмы LITTON, США) разработана корабельная БИНС на лазерных гироскопах: MOD1 (Рис.6.16) и MOD2 (Рис.6.17).


Рис. 6.16 Рис. 6.17
В данной системе в отличие от БИНС Mk. 49 для исключения влияния зоны нечувствительности ЛГ вместо виброподставки каждого из гироскопов применено реверсное вращение всего ИИМ вокруг оси, ортогональной плоскости палубы объекта. Ось вращения располагается по продольной оси трехгранной пирамиды, на гранях которой закреплены ЛГ, что приводит к смещению рабочей зоны от зоны нечувствительности для каждого гироскопа. Кроме того, данное вращение обеспечивает наблюдаемость дрейфов ЛГ и автокомпенсацию их проекций на плоскость, ортогональную оси вращения ИИМ.
PL41
MK4
MOD1
характеризуется
уровнем погрешностей (![]() )
автономного режима - 1м.м. за 8 часов.
Предназначена для навигационного
обеспечения надводных кораблей.
)
автономного режима - 1м.м. за 8 часов.
Предназначена для навигационного
обеспечения надводных кораблей.
К настоящему времени изготовлено 29 систем, первые одиннадцать систем – находятся уже в процессе эксплуатации на надводных кораблях NATO.
PL41
MK4
MOD2
характеризуется
уровнем погрешностей (![]() )
автономного режима - 1м.м. за 24 часа.
Предназначена для навигационного
обеспечения подводных лодок. Заказано
6 систем для установки на дизельных плU212
Италии и Германии.
)
автономного режима - 1м.м. за 24 часа.
Предназначена для навигационного
обеспечения подводных лодок. Заказано
6 систем для установки на дизельных плU212
Италии и Германии.
БИИМ на ВОГ - PHINS (ф. IXSEA, Франция)
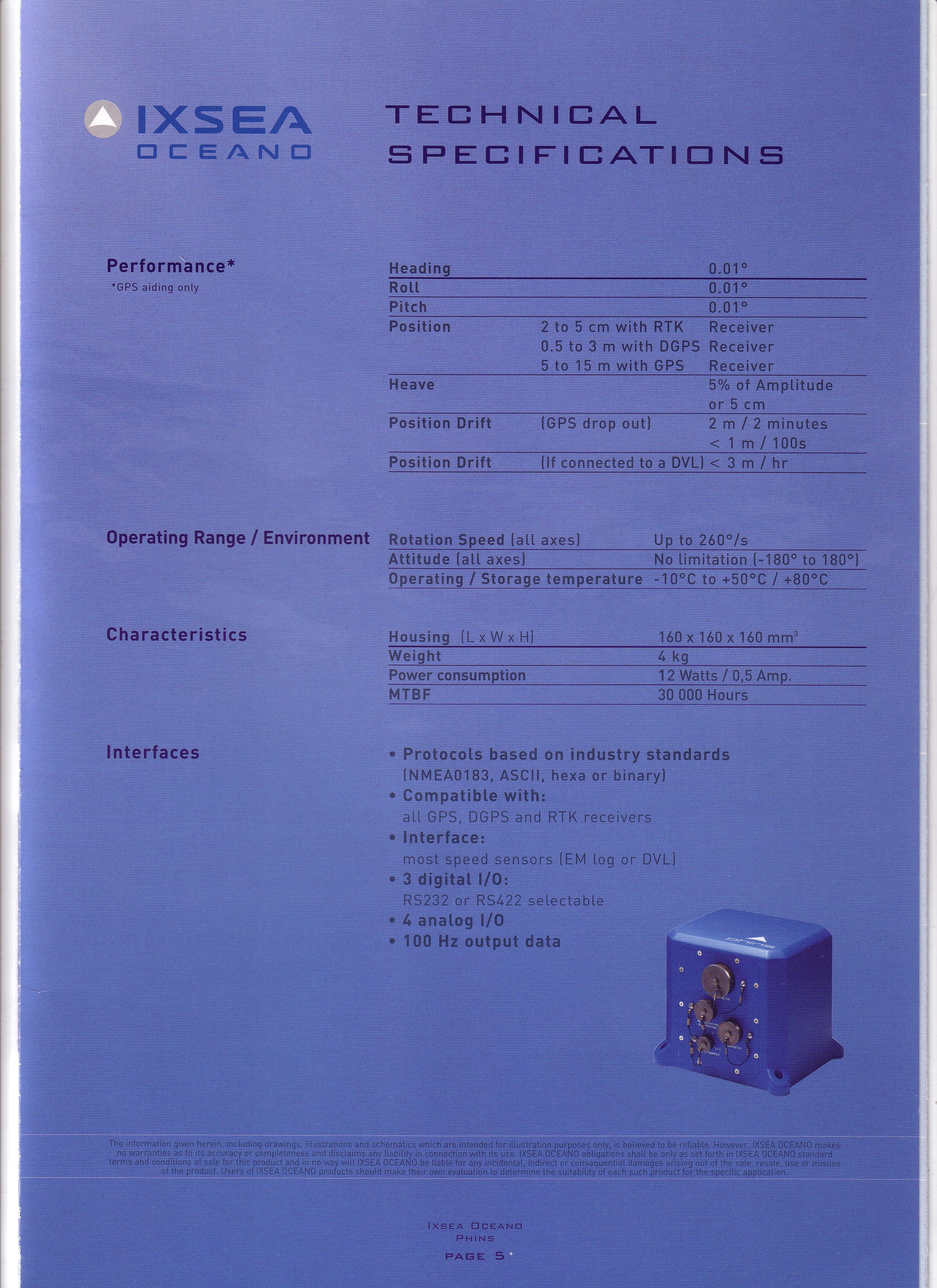
Рис. 6.18
БИИМ на ВОГ - MARINS (ф. IXSEA, Франция)
Одна из последних разработок ф. IXSEA – альтернатива корабельной БИНС на лазерных гироскопахф. Sagem.
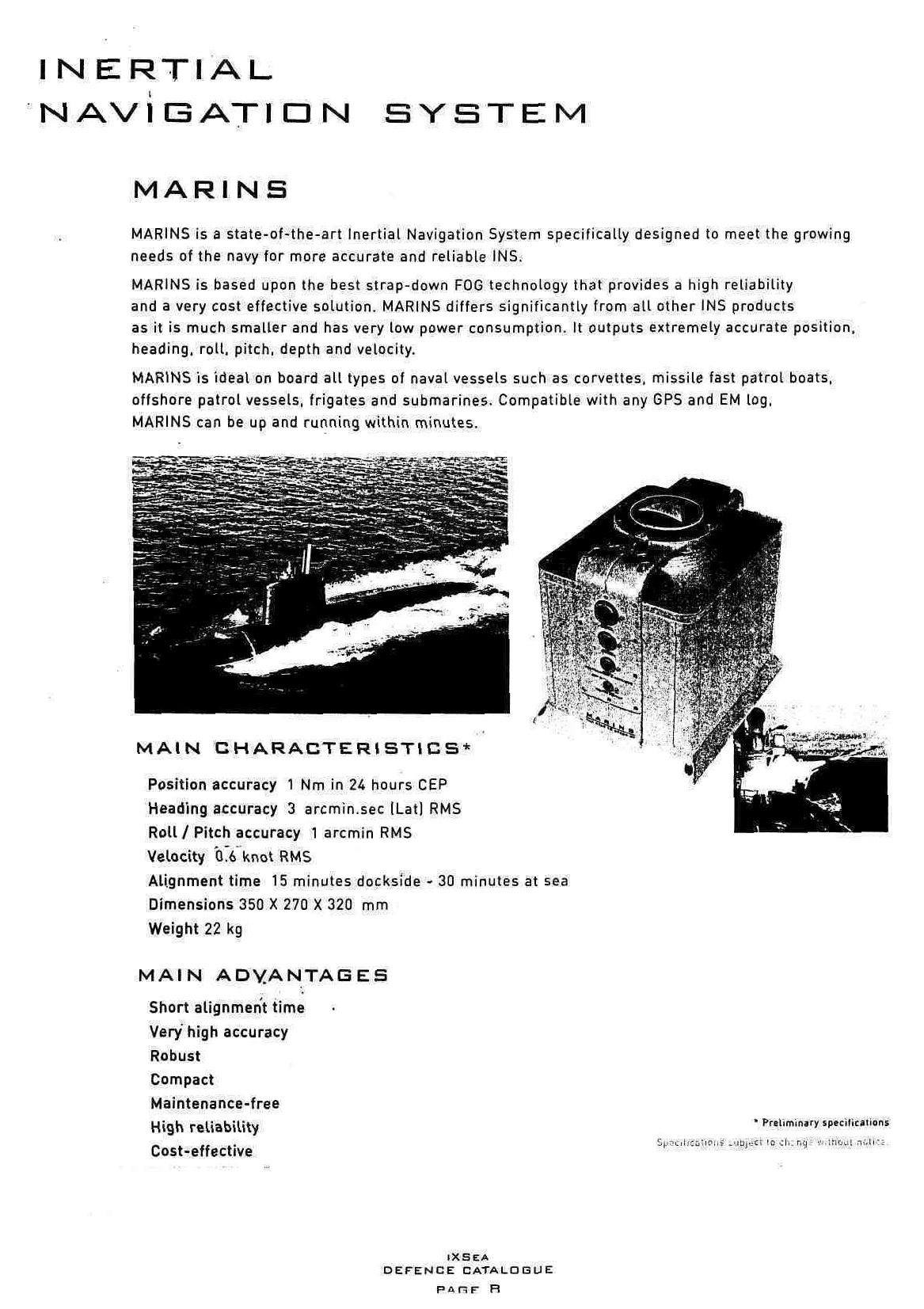
Ниже представлены результаты испытаний, проведенных в 2005 года Лабораторией Министерства Обороны Франции (рис.4 – на стенде), и результаты испытаний на борту военно-морского судна (рис.12).
Основу MARINS-системы представляют три ВОГ диаметром 200 мм и три маятниковых акселерометра (рис.2).

Основные характеристики чувствительных элементов:
Гироскопы:
смещение нуля 0,0005 град/час
масштабный коэффициент 20ppm(1ppm=10-6)
Акселерометры:
смещение нуля 4 µg(0.8 угл. с)
масштабный коэффициент 40ppm
Размеры MARINS – 420х310х310 мм (длина х ширина х высота)
MARINS может получать данные о местоположении от двух различных GPSприёмников и от приёмникаLORANС. Для измерения глубины в MARINS используются данные от датчика глубины. Это оборудование может быть связано с MARINS либо по сетиEthernet, либо по стандартным каналам (RS232 или 422). Дополнительно могут быть получены данные о скорости относительно воды от электромагнитного лага (EMlog) или о скорости относительно грунта от Допплеровского акустического лага (DVL). Эти измерения могут быть переданы по каналам указанным выше.
Внутренний навигационный фильтр Калмановского типа вычисляет длиннопериодный дрейф внутренних сенсоров (гироскопов и акселерометров), если имеются данные от внешних датчиков. Внешние датчики контролируются на правдоподобие их показаний перед использованием в фильтре Калмана. Это позволяет исключить любые измерения, которые не согласуются с ковариациями, вычисленными в Калмановском фильтре. Начальная выставка производится за 20 мин (у стенки) и 30 мин (в море).
Испытания на стенде
При данном курсовом угле (направление на Восток), многократные процедуры выставки характеризовали повторяемость выработанного углового положения. Результатом является СКО погрешности курса 0,4 угл.мин.
Три серии испытаний были проведены в течении трёх дней при 12 различных курсах. Результаты по точности выработки курса в зависимости от курсового положения прибора приведены на рис.4. СКО по всем измерениям составляло 0.24 mrd(1 угл.мин), что свидетельствует о возможном влиянии внешнего магнитного поля (поле Земли) на уровне (СКО) 0.0020/ч на 1Э.

Мореходные испытания
MARINS успешно прошла мореходные испытания по оценке качества, проведённые Лабораторией Министерства Обороны (LRBA,Vemon). Полученные характеристики соответствуют высшему классу инерциальных навигационных систем (1м. миля за 24 часа).
Точность определения местоположения в течение мореходных испытаний показана на рис.12. Погрешность местоположения за 35 часов составила около 1.3 м.миль (Рис.12), что соответствует дрейфу ≤0.001 0/ч.

Отечественные БИНС
Авиационная система на лазерных гироскопахБИНС-85 (фирма МИЭА, г. Москва).
Система предназначена для автономного измерения, вычисления и выдачи потребителям пилотажно-навигационных параметров и параметров ориентации самолета.
Измерительный блок (ИБ) системы содержит три лазерных гироскопа ЛГ-1, три кварцевых акселерометра АК-6 и сервисную электронику. ИБ жестко закреплен в осях объекта. Лазерный гироскоп ЛГ-1 и кварцевый акселерометр АК-6 разработаны в МИЭА, прошли все виды испытаний и с 1995 года серийно выпускаются на серпуховском заводе «Лазеравиа».
Основные технические характеристики БИНС-85 приведены в табл.3.
Таблица 3
|
Характеристика |
Значение |
|
1 |
2 |
|
Погрешность определения ( |
|
|
|
|
Время готовности |
|
|
Температурный интервал |
от - 200С до + 550С |
|
Объем выдаваемой информации в цифровом виде |
32 параметра |
|
Среднее время наработки на отказ |
|
|
Масса (без рамы) |
|
|
Габаритные размеры |
319x322x194 |
|
Потребляемая мощность |
180 Вт |
БИНС НСИ – 2000
ф. LASEX (г.Москва); E-mail: laser@pop3.mipt.ru
ЛГК-200
(с 4-мя зеркалами, моноблок, L= 200
mm);
![]() о/ч
,
о/ч
,
![]() 0,003
град/
0,003
град/![]()



Рис. 6.19