

6.3. Алгоритмы выработки параметров ориентации в биим на позиционных гироскопах
Для выработки параметров ориентации в
БИИМ на ПГ типа ЭСГ, как правило, вводят
правый ортогональный трехгранник
![]() ,
орты которого
,
орты которого![]() ,
например, следующим образом построены
на ортах
,
например, следующим образом построены
на ортах![]() векторов
векторов![]() и
и![]() (рис.6.9) (т.е. необходимо решениезадачи
ортогонализации):
(рис.6.9) (т.е. необходимо решениезадачи
ортогонализации):
![]() ,
,![]() ,
,![]() ,
(6.26)
,
(6.26)
где
![]() - угол между векторами
- угол между векторами![]() ,
причем
,
причем![]() .
.
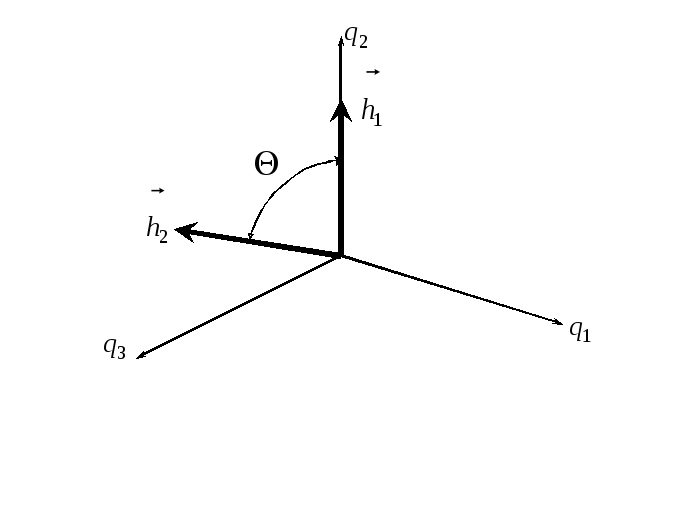
Рис.6.9. Система координат
![]() ,
связанная с ортами
,
связанная с ортами![]() кинетических моментов ЭСГ
кинетических моментов ЭСГ
Ориентацию трехгранника
![]() относительно связанной с ИБ системы
координат
относительно связанной с ИБ системы
координат![]() определим в этом случае следующей
матрицей направляющих косинусов
определим в этом случае следующей
матрицей направляющих косинусов
 .
(6.27)
.
(6.27)
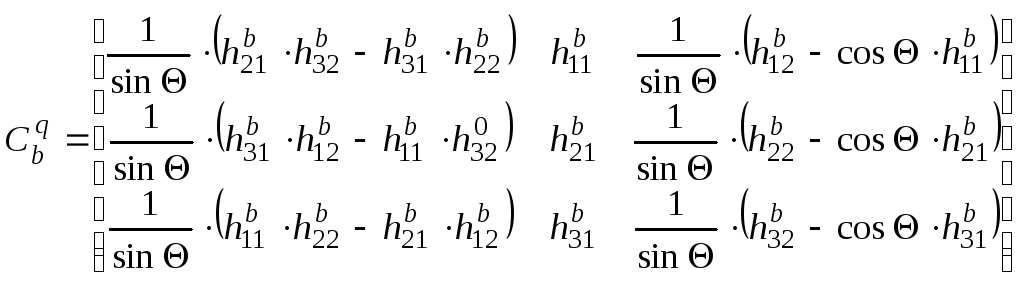
Элементы искомой матрицы
![]() направляющих косинусов, определяющей
взаимную ориентацию связанной с ИБ
системы координат и географического
сопровождающего трехгранника
направляющих косинусов, определяющей
взаимную ориентацию связанной с ИБ
системы координат и географического
сопровождающего трехгранника![]() ,
могут быть вычислены в соответствии с
матричным соотношением:
,
могут быть вычислены в соответствии с
матричным соотношением:
![]() .
(6.28)
.
(6.28)
В БИИМ на ЭСГ исходными являются
направляющие косинусы ортов
![]() векторов кинетических моментов ЭСГ
относительно правых ортогональных
систем координат
векторов кинетических моментов ЭСГ
относительно правых ортогональных
систем координат![]() и
и![]() (рис.6.10), связанных с корпусами гироскопов,
соответственно:
(рис.6.10), связанных с корпусами гироскопов,
соответственно:
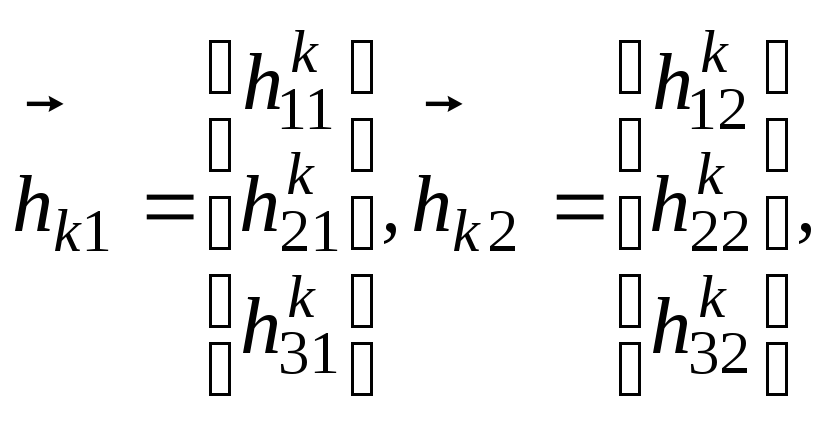 (6.29)
(6.29)
Направляющие косинусы этих же ортов в
связанной с ИБ системе координат
![]() могут быть найдены в соответствии с
рис.6.10, как
могут быть найдены в соответствии с
рис.6.10, как

 , (6.30)
, (6.30)
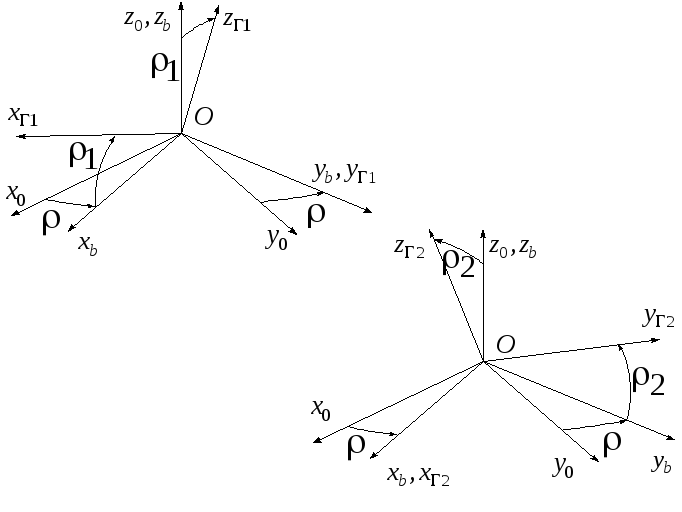
Рис.6.10. Ориентация систем координат
![]() и
и![]() ,
связанных с корпусами ЭСГ, относительно
корпуса объекта и блока ЧЭ
,
связанных с корпусами ЭСГ, относительно
корпуса объекта и блока ЧЭ
Для нахождения матрицы
![]() ,
учитывающей прецессию трехгранника
,
учитывающей прецессию трехгранника![]() в инерциальной системе координат
в инерциальной системе координат![]() ,
необходимо вычисление текущей ориентации
ортов
,
необходимо вычисление текущей ориентации
ортов![]() векторов
векторов![]() и
и![]() в ИСК, т.е. вычисление их направляющих
косинусов в ИСК:
в ИСК, т.е. вычисление их направляющих
косинусов в ИСК:
 .
(6.31)
.
(6.31)
Заметим, что эти направляющие косинусы
рассчитываются в вычислителе БИИМ по
известным паспортным (откалиброванным)
значениям детерминированных составляющих
дрейфов гироскопов в соответствии с
принятой расчетной моделью уходов ЭСГ.
Ориентация орта
![]() вектора
вектора![]() кинетического момента ЭСГ в инерциальной
системе координат, помимо направляющих
косинусов (6.31), может быть задана двумя
углами Эйлера (рис.6.11): либо
кинетического момента ЭСГ в инерциальной
системе координат, помимо направляющих
косинусов (6.31), может быть задана двумя
углами Эйлера (рис.6.11): либо![]() - прямым восхождением и склонением либо
углами
- прямым восхождением и склонением либо
углами![]() ,
заданными относительно системы координат
,
заданными относительно системы координат![]() ,
связанной с меридианом места. Через эти
углы направляющие косинусы (6.31)
определяются следующими соотношениями:
,
связанной с меридианом места. Через эти
углы направляющие косинусы (6.31)
определяются следующими соотношениями:
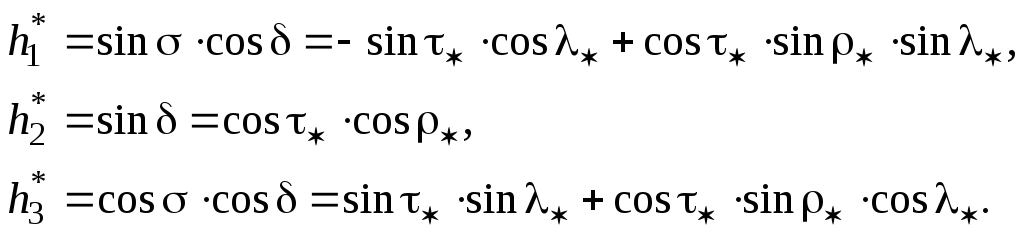 (6.32)
(6.32)
Движение орта
![]() вектора
вектора![]() кинетического момента ЭСГ в инерциальной
системе координат может быть описано
векторным дифференциальным уравнением:
кинетического момента ЭСГ в инерциальной
системе координат может быть описано
векторным дифференциальным уравнением:
![]() ,
(6.33)
,
(6.33)
где
![]() - вектор угловой скорости ухода (дрейф)
гироскопа,
- вектор угловой скорости ухода (дрейф)
гироскопа,![]() - начальное положение орта вектора
кинетического момента гироскопа в
инерциальной системе координат.
- начальное положение орта вектора
кинетического момента гироскопа в
инерциальной системе координат.
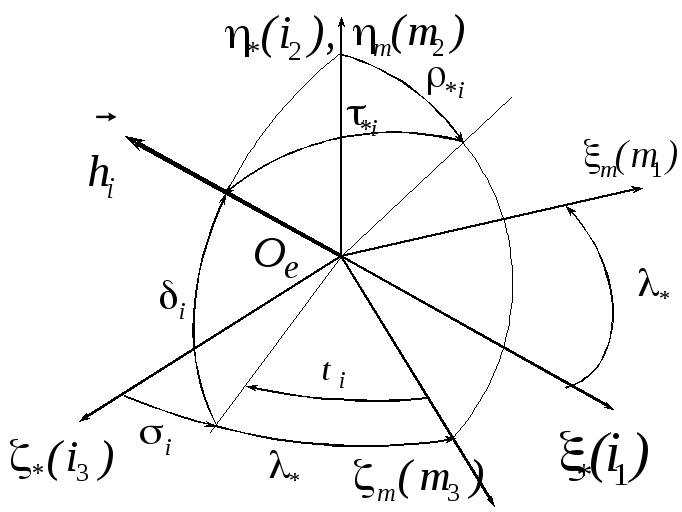
Рис.6.11. Ориентация орта
![]() вектора
вектора![]() кинетического момента ЭСГ в инерциальной
системе координат
кинетического момента ЭСГ в инерциальной
системе координат
Скалярные дифференциальные уравнения
для направляющих косинусов орта
![]() вектора
вектора![]() кинетического момента гироскопа в
инерциальной системе координат будут:
кинетического момента гироскопа в
инерциальной системе координат будут:
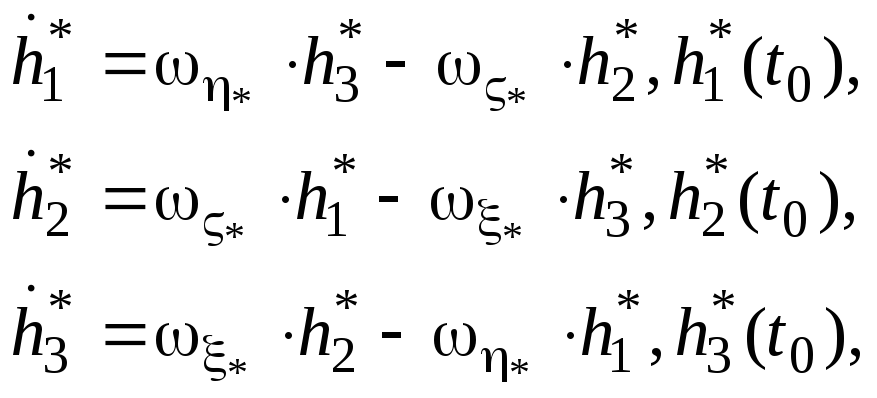 (6.34)
(6.34)
где
![]() - соответствующие проекции вектора
дрейфа гироскопа на оси инерциальной
системы координат.
- соответствующие проекции вектора
дрейфа гироскопа на оси инерциальной
системы координат.
В соответствии с принятым условием (6.26) задачи ортогонализации находим, что
 .
(6.35)
.
(6.35)
Дрейф гироскопа включает как детерминированные (систематические), так и случайные составляющие. Основные детерминированные составляющие дрейфа могут быть математически описаны в его модели. Модель дрейфа гироскопа используется для алгоритмической компенсации его систематических уходов в БИИМ. В настоящее время получена модель дрейфа ЭСГ для БИИМ, которая учитывает как консервативную природу пондеромоторных сил электростатического подвеса, так и неконсервантивные уводящие моменты, обусловленные магнитным взаимодействием корпуса и ротора[19, 24, 43, 82].
Отметим, что программное (расчетное)
движение или положение трехгранника
![]() относительно инерциальной системы
координат может быть осуществлено также
интегрированием уравнения Пуассона:
относительно инерциальной системы
координат может быть осуществлено также
интегрированием уравнения Пуассона:
![]() ,
(6.36)
,
(6.36)
где
![]() - начальное значение матрицы;
- начальное значение матрицы;
 - кососимметрическая матрица, элементы
которой являются проекциями вектора
- кососимметрическая матрица, элементы
которой являются проекциями вектора![]() дрейфа трехгранника
дрейфа трехгранника![]() на его оси, который определяется векторным
соотношением [2]:
на его оси, который определяется векторным
соотношением [2]:
![]() (6.37)
(6.37)
где
![]() - векторы систематических дрейфов
соответственно ЭСГ1и ЭСГ2.
- векторы систематических дрейфов
соответственно ЭСГ1и ЭСГ2.
Вектор
![]() систематического дрейфа трехгранника
систематического дрейфа трехгранника![]() на его оси может быть определен также
выражением:
на его оси может быть определен также
выражением:
![]() (6.38)
(6.38)
Отметим, что для обеспечения ортогональности
матриц (6.27) и (6.35), значение угла
![]() вычисляется по следующим формулам:
вычисляется по следующим формулам:
а) для соотношений (6.27)
![]() ;
(6.39)
;
(6.39)
б) для соотношений (6.35)
![]() .
(6.40)
.
(6.40)
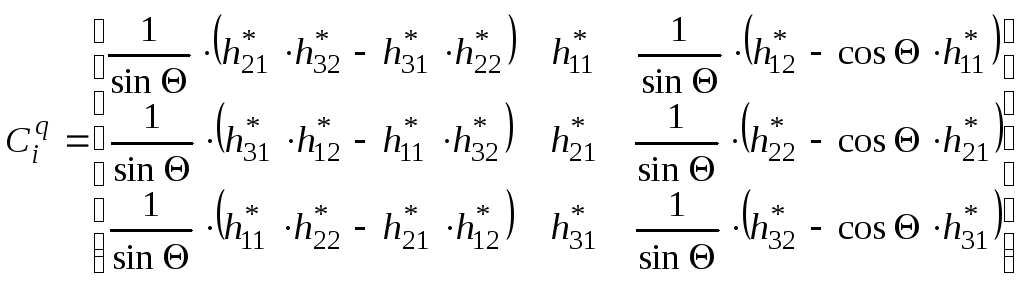
Для нахождения искомой матрицы
![]() направляющих косинусов согласно
соотношению (6.28)
направляющих косинусов согласно
соотношению (6.28)
![]() ,
,
необходимо также знание матрицы
![]() направляющих косинусов, определяющей
взаимную ориентацию горизонтной и
инерциальной систем координат, которая
в соответствии с (6.1) вычисляется по
значениям выработанных в БИИМ координат
места.
направляющих косинусов, определяющей
взаимную ориентацию горизонтной и
инерциальной систем координат, которая
в соответствии с (6.1) вычисляется по
значениям выработанных в БИИМ координат
места.
Искомые углы
![]() вычисляются из значений элементов
матрицы
вычисляются из значений элементов
матрицы
 ,
,
(где
![]() - матрица направляющих косинусов,
определяющая ориентацию связанной с
ИБ системы координат
- матрица направляющих косинусов,
определяющая ориентацию связанной с
ИБ системы координат![]() относительно связанной с корпусом
объекта системы координат
относительно связанной с корпусом
объекта системы координат![]() )
)
по формулам, определенным соотношениями (6.22)…(6.25).
Вычисление скоростей
![]() изменения углов курса и качек в БИИМ на
ПГ требует численного дифференцирования
параметров ориентации, что является
особенностью таких систем.
изменения углов курса и качек в БИИМ на
ПГ требует численного дифференцирования
параметров ориентации, что является
особенностью таких систем.