

6.2. Алгоритмы выработки параметров ориентации в биим на дус и иуу
Под решением задачи ориентации в БИИМ
прежде всего понимается определение
параметров ориентации ИБ БИИМ, т.е.
нахождение матрицы ориентации
![]() трехгранника
трехгранника![]() относительно сопровождающего
географического трехгранника
относительно сопровождающего
географического трехгранника![]() (которая используется в алгоритмах БИИМ
для преобразования кажущихся ускорений,
измеренных линейными акселерометрами,
на навигационные оси для решения задачи
навигации). И как следствие решения
задачи ориентации ИБ БИИМ уже затем
вычисляются параметры ориентации
объекта, т.е. вычисляются значения
матрицы
(которая используется в алгоритмах БИИМ
для преобразования кажущихся ускорений,
измеренных линейными акселерометрами,
на навигационные оси для решения задачи
навигации). И как следствие решения
задачи ориентации ИБ БИИМ уже затем
вычисляются параметры ориентации
объекта, т.е. вычисляются значения
матрицы![]() и углов курса
и углов курса![]() ,
килевой качки
,
килевой качки![]() и бортовой качки
и бортовой качки![]() ,
являющихся выходными данными БИИМ
(рис.6.4).
,
являющихся выходными данными БИИМ
(рис.6.4).
Искомые матрицы ориентации могут быть определены как:
![]() ,
,
![]() ,
(6.7)
,
(6.7)
где
 - матрица направляющих косинусов,
определяющая ориентацию связанной с
ИБ системы координат
- матрица направляющих косинусов,
определяющая ориентацию связанной с
ИБ системы координат![]() относительно осей
относительно осей![]() объекта (рис.6.8) и вычисляемая по данным
соответствующего датчика угла (ДУ) об
угле
объекта (рис.6.8) и вычисляемая по данным
соответствующего датчика угла (ДУ) об
угле![]() - при модуляционных поворотах ИБ;
- при модуляционных поворотах ИБ;
![]() - матрица начальной привязки осей ИБ к
осям объекта – при неподвижном положении
ИБ в осях объекта.
- матрица начальной привязки осей ИБ к
осям объекта – при неподвижном положении
ИБ в осях объекта.
Если исходной информацией для вычисления
параметров ориентации являются
составляющие вектора
![]() угловой скорости вращения связанной с
измерительным блоком системы координат
угловой скорости вращения связанной с
измерительным блоком системы координат![]() на ее оси (БИИМ на ДУС), т.е.
на ее оси (БИИМ на ДУС), т.е.
 ,
(6.8)
,
(6.8)
то элементы матрицы
![]() могут быть вычислены интегрированием
кинематического уравнения или, как его
иногда называют,уравнения Пуассона[1]:
могут быть вычислены интегрированием
кинематического уравнения или, как его
иногда называют,уравнения Пуассона[1]:
![]() (6.9)
(6.9)
где
 - кососимметрическая матрица,
соответствующая вектору
- кососимметрическая матрица,
соответствующая вектору![]() угловой скорости вращения трехгранника
угловой скорости вращения трехгранника![]() ;
;
![]() - начальное значение матрицы
- начальное значение матрицы![]() .
.

Рис.6.8. Ориентация связанной с ИБ системы
координат
![]() относительно связанной с корпусом
объекта системы координат
относительно связанной с корпусом
объекта системы координат![]()
Заметим, что для безгироскопных БИИМ
на ИУУ составляющие вектора
![]() могут быть вычислены:
могут быть вычислены:
в случае УА - интегрированием составляющих
 вектора
вектора углового ускорения трехгранника
углового ускорения трехгранника на свои оси
на свои оси
![]()
![]()
![]() (6.10)
(6.10)
где
![]() - значение соответствующих составляющих
угловых скоростей в начальный момент
времени
- значение соответствующих составляющих
угловых скоростей в начальный момент
времени![]() .
.
в случае разнесенных линейных акселерометров - интегрированием разностей
 кажущихся ускорений:
кажущихся ускорений:
![]()
![]() (6.11)
(6.11)
![]()
где
![]() - расстояния, характеризующие
пространственное разнесение соответствующих
линейных акселерометров.
- расстояния, характеризующие
пространственное разнесение соответствующих
линейных акселерометров.
Элементы матрицы
![]() ,
входящей в (6.7), должны вычисляться в
соответствии с (6.1) по значениям
выработанных в БИИМ координат места.
,
входящей в (6.7), должны вычисляться в
соответствии с (6.1) по значениям
выработанных в БИИМ координат места.
Матрица ориентации
![]() ,
определяющая ориентацию связанного с
ИБ трехгранника
,
определяющая ориентацию связанного с
ИБ трехгранника![]() относительно навигационных осей, может
быть определена также непосредственно
интегрированием уравнения Пуассона в
виде [1]:
относительно навигационных осей, может
быть определена также непосредственно
интегрированием уравнения Пуассона в
виде [1]:
![]() (6.12)
(6.12)
где
 - кососимметрическая матрица,
соответствующая вектору
- кососимметрическая матрица,
соответствующая вектору![]() угловой скорости вращения географического
сопровождающего трехгранника
угловой скорости вращения географического
сопровождающего трехгранника![]() ;
;![]() - начальное значение матрицы
- начальное значение матрицы![]() .
.
Составляющие вектора
![]() угловой скорости вращения географического
сопровождающего трехгранника определяются
соотношениями:
угловой скорости вращения географического
сопровождающего трехгранника определяются
соотношениями:
![]() ,
,![]() ,
,
![]() ,
(6.13)
,
(6.13)
где
![]() град./ч - угловая скорость суточного
вращения Земли;
град./ч - угловая скорость суточного
вращения Земли;
![]()
![]() (6.14)
(6.14)
и для эллипсоида Красовского
![]() м.
м.
Кинематические уравнения, связывающие
вектор
![]() угловой скорости и параметры ориентации
в виде углов Эйлера-Крылова, имеют вид:
угловой скорости и параметры ориентации
в виде углов Эйлера-Крылова, имеют вид:
![]()
![]()
![]() ;
;
Для уменьшения требуемой производительности
и объема памяти БЦВМ, а также снижения
вычислительных погрешностей при решении
задачи ориентации в современных БИИМ
на ДУС вначале осуществляется вычисление
элементов вектора Эйлера в качестве
промежуточного кинематического
параметра. А затем по известным
соотношениям осуществляется вычисление
параметров Родрига-Гамильтона (элементов
соответствующего кватерниона) и элементов
матриц
![]() ,
,![]() направляющих косинусов [16, 39, 49].
направляющих косинусов [16, 39, 49].
Кинематические уравнения, связывающие
вектор
![]() угловой скорости и вектор Эйлера
угловой скорости и вектор Эйлера
где
![]() ,
,![]() - направляющие косинусы орта
- направляющие косинусы орта![]() в подвижном базисе
в подвижном базисе![]() (
(![]()
![]()
![]() ),
),
имеют вид:
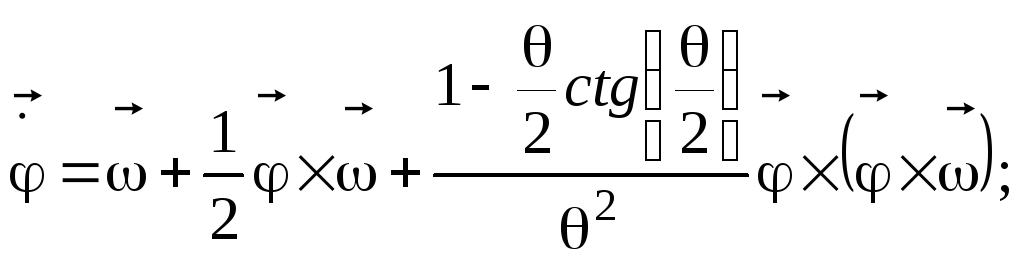 (6.15)
(6.15)
Интегрируя уравнение (6.15), вычисляются составляющие вектора Эйлера. После чего, в соответствии с соотношениями
 (6.16)
(6.16)
![]() ,
,
могут быть сформированы элементы
кватерниона
![]() .
.
Искомый кватернион
![]() ,
определяющий ориентацию измерительного
блока
,
определяющий ориентацию измерительного
блока![]() относительно горизонтной системы
координат
относительно горизонтной системы
координат![]() с географической ориентацией осей,
может быть найден по теореме сложения
преобразований или в виде “кватернионного”
произведения:
с географической ориентацией осей,
может быть найден по теореме сложения
преобразований или в виде “кватернионного”
произведения:
![]() (6.17)
(6.17)
где верхние и нижние индексы кватернионов
соответствуют системам координат
относительно которых они определяют
ориентацию,
![]() обозначает сопряженный кватернион, а
знак (
обозначает сопряженный кватернион, а
знак (![]() )
- оператор “умножения” кватернионов.
)
- оператор “умножения” кватернионов.
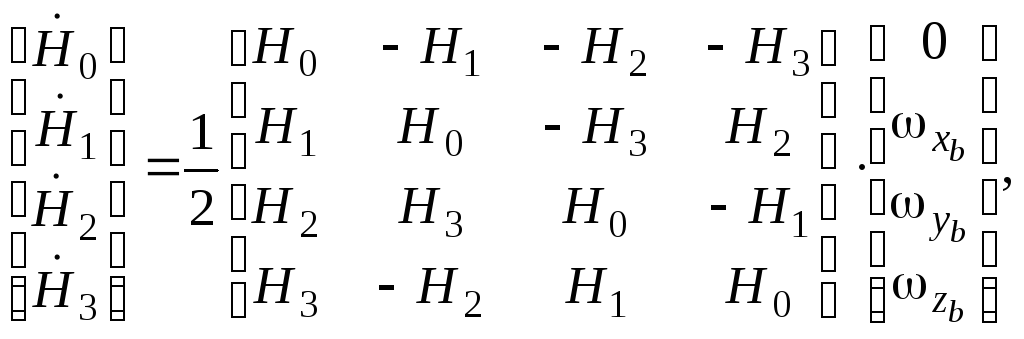
Компоненты кватерниона
![]() могут быть вычислены либо через
составляющие вектора Эйлера либо
непосредственно интегрированием
уравнения Пуассона:
могут быть вычислены либо через
составляющие вектора Эйлера либо
непосредственно интегрированием
уравнения Пуассона:
![]() (6.18)
(6.18)
или в векторно-матричной форме (здесь
и далее опуская у компонентов кватерниона
![]() верхние и нижние индексы)
верхние и нижние индексы)
 где
где - матрица, соответствующая кватернионному
произведению;
- матрица, соответствующая кватернионному
произведению;
 - кватернион, соответствующий вектору
- кватернион, соответствующий вектору![]() .
.
Элементы кватерниона
![]() вычисляются аналогично
вычисляются аналогично
![]() (6.19)
(6.19)
где
 - кватернион, соответствующий вектору
- кватернион, соответствующий вектору![]() .
.
Матрица ортогонального преобразования
или матрица
![]() направляющих косинусов, определяющая
взаимную ориентацию подвижной и
неподвижной систем координат, выражается
через элементы кватерниона
направляющих косинусов, определяющая
взаимную ориентацию подвижной и
неподвижной систем координат, выражается
через элементы кватерниона![]() следующим образом:
следующим образом:
 .
(6.20)
.
(6.20)
Для получения выходных параметров
ориентации, т.е. углов
![]() необходимо знание элементов матрицы:
необходимо знание элементов матрицы:
 ,
(6.21)
,
(6.21)
где
 - матрица направляющих косинусов,
определяющая ориентацию связанной с
ИБ системы координат
- матрица направляющих косинусов,
определяющая ориентацию связанной с
ИБ системы координат![]() относительно связанной с корпусом
объекта системы координат
относительно связанной с корпусом
объекта системы координат![]() .
.
Из элемента
![]() находим выражение для угла килевой
качки
находим выражение для угла килевой
качки![]() :
:
![]() (6.22)
(6.22)
Элементы
![]() и
и![]() позволяют определить угол бортовой
качки
позволяют определить угол бортовой
качки![]() :
:
![]() .
(6.23)
.
(6.23)
Поскольку модули углов
![]() и
и![]() меньше
меньше![]() ,
то приведенные выше выражения однозначно
определяют значения углов килевой и
бортовой качек.
,
то приведенные выше выражения однозначно
определяют значения углов килевой и
бортовой качек.
Для нахождения соотношения, однозначно
определяющего курс
![]() ,
воспользуемся элементами матриц
,
воспользуемся элементами матриц![]() и функциейMatlabatan2:
и функциейMatlabatan2:
K=atan2(d12/d22); (6.24)
при
atan2<0
K=atan2(d12/d22)+2*pi; (6.25)