

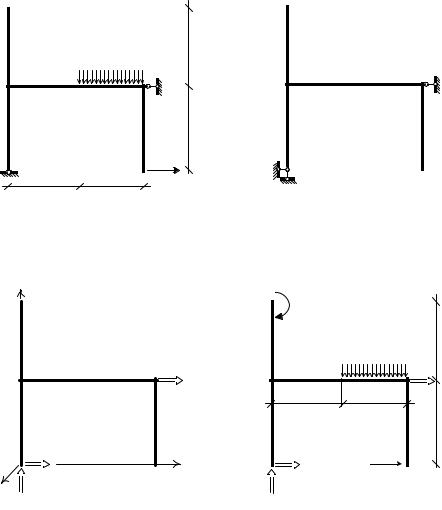
4.2. РАСЧЕТ ЛОМАНОГО БРУСА
Особенностью ломаного бруса (в сравнении с однопролетной балкой) является наличие в его сечениях продольных усилий, возникающих от поперечной нагрузки.
за рис. 4.13 приведена заданная расчетная схема примера. кис. 4.14 содержит вариант изображения опорных связей, при ко-
тором одной реакции соответствует один опорный стержень. Это помогает определить как количество реакций, так и их характер.
 qa2
qa2
a
q
a
2qa
a a
Ðèñ. 4.13 |
Ðèñ. 4.14 |
за рис. 4.15 вводится система координат, оси которой определяют правило знаков для реактивных сил, заданных своими обозначениями. кеакции до их определения считаются положительно направленными, как это проиллюстрировано на рис. 4.16.
|
Y |
|
qa2 |
|
|
|
|
X, Y, Z - глобальная система |
|
|
|
|
|
|
|
|
|
|
|
координат, "привязанная" |
|
|
a |
|
|
к расчетной схеме |
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
B XÇ |
|
|
X |
|
|
|
|
|
B |
|
|
|
a |
a |
B |
|
|
|
|
|
a |
A XÄ |
X |
A |
2qa |
||
|
|
|
XÄ |
|
|
Z |
YÄ |
|
YÄ |
|
|
|
Ðèñ. 4.15 |
Ðèñ. 4.16 |
|
|
|
|
|
|
|
||
91

|
По данным рис. 4.16 назначаются уравнения равновесия (4.5) и |
||||||||||||||||||||
варианты их применения для определения реакций опорных связей. |
|||||||||||||||||||||
|
YA |
∑Y = 0; |
|
|
|
(1) |
(2) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
èëè |
|
. |
|
|
|
|
|
|
|
|
|
X |
|
∑ |
mom |
= 0; |
|
( |
2 |
) |
1 |
|
|
|
|
|
|
|
|
|||
|
B |
|
A |
|
|
|
|
|
( ) |
|
|
|
|
|
|
|
|
(4.5) |
|||
|
|
|
∑ |
|
|
|
|
( |
3) |
|
(3) |
|
|
|
|
|
|
|
|
||
|
|
|
X = 0. |
|
|
|
|
|
|
|
|
|
|
||||||||
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Далее решение проводится по последовательности первого варианта |
||||||||||||||||||||
уравнений (4.5). Используем первое уравнение последовательности: |
|
||||||||||||||||||||
|
∑Y = YA − qa = 0 YA |
= qa. |
Итак, одна из неизвестных реак- |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
öèé Y A |
найдена и рис. 4.16 трансфор- |
||||||||||
|
qa2 |
|
|
|
|
|
|
|
|
мируется в рис. 4.17, à. Следует обра- |
|||||||||||
|
|
|
|
|
|
|
|
|
тить внимание на то, что теперь обо- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
a |
|
|
|
|
значение реакции |
YA не должно |
||||||||||
|
|
|
|
|
|
|
|
|
появляться ни в одном из уравнений, |
||||||||||||
|
|
|
|
q |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
формируемых далее. |
|
|
|
|
|
|
||||||
|
|
|
|
|
XB |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Используем второе уравнение |
|||||||||||
|
a |
|
|
a |
B |
|
|
|
|
первой последовательности уравнений |
|||||||||||
|
|
|
|
|
a |
|
|
|
|
(4.5): |
|
|
|
|
F |
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
∑ mom A |
= −qa |
2 |
− q |
+ |
1 |
|
|
|||
A |
|
|
|
2qa |
|
|
|
|
|
|
a Ga |
2 |
aJ − |
||||||||
XA |
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
K |
|
||||
|
|
|
|
|
|
|
|
|
|
|
− XB a = 0 XB |
= − |
5 |
qa . |
|||||||
qa |
|
à |
|
|
|
|
|
|
|
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
qa2 |
|
|
|
|
|
|
|
|
|
|
qa2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
a |
5 |
|
|
|
|
|
|
|
|
|
|
|
a |
5 |
|
|
|
|
|
|
|
qa |
|
|
|
|
|
|
|
q |
|
|
|
qa |
||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
a |
|
|
|
|
|
|
|
|
a |
C |
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
0,5a 0,5a |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
||
A |
XA |
|
2qa |
|
|
|
|
|
|
|
1 |
|
|
2qa |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
qa |
|
|
|
|
|
|
|
|
|
|
qa |
2 qa |
|
|
|
|
|
|
|
||
|
|
|
á |
|
|
|
|
|
|
|
|
|
â |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Ðèñ. 4.17 |
|
|
|
|
|
|
|
|
|
|
||
92
Заменяя на рис. 4.17, à обозначение реакции X B найденным вектором, получаем рис. 4.17, á, по которому в соответствии с третьим уравнением первой последовательности (4.5) формируем уравнение равновесия для определения реакции XA:
∑X = X A − 52 qa + 2qa = 0 X A = 12 qa.
Итак, реакции опорных связей определены. Это позволяет указать на расчетной схеме все нагрузки в явном виде («в значениях»), что и сделано на рис. 4.17,. âДанные этого рисунка используются для проведения контроля правильности определения реакций опорных связей по уравнению:
∑momë |
= |
1 qa a − qa a − qa 2 − q a |
1 a + |
2qa a = 0 |
|||
|
|
2 |
1I qa 2 |
+ F 1 |
+ 2I qa 2 |
2 |
|
|
− F1 +1+ |
≡ 0 . |
(4.6) |
||||
|
|
G |
J |
G |
J |
|
|
|
|
H |
2K |
H 2 |
K |
|
|
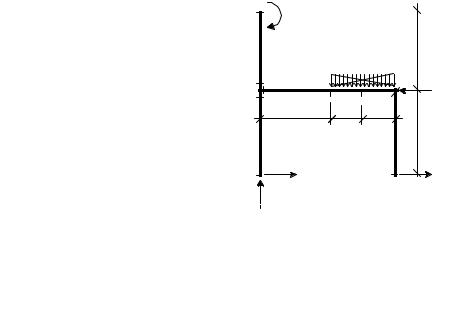
Для назначения контролируемых сечений на рис. 4.18 выделим четыре участка с линейным законом изменения изгибающего момента (1-2, 3-4, 5-6, 8-9) и один участок – с параболическим законом (6-8).
Сечения 2, 3 и 5 позволяют |
|
|
|
|
|
|
|
|
учесть наличие внутренних момен- |
|
qa2 |
|
|
|
|
|
|
тов приходящих в узел с разных |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
участков, а также факт «игры» про- |
|
|
|
|
|
a |
|
|
дольных и поперечных усилий в |
|
|
|
|
|
5 |
|
|
этом узле; сечение 8 позволяет |
|
|
|
q |
|
|
qa |
|
|
5 |
6 |
|
|
|
2 |
||
учесть переход продольных сил в |
3 |
|
|
|
|
|||
поперечные (и наоборот) в этом |
2 |
a |
7 |
|
8 |
|
|
|
узле; наконец, сечение 7 дает воз- |
|
0,5a |
0,5a |
|
|
|
||
|
|
|
|
|
a |
|
|
|
можность описать закон параболы |
|
|
|
|
|
|
|
|
по трем значениям ординат момен- |
|
|
|
|
|
|
2qa |
|
та на участке 6-8. |
1 |
|
1 qa |
|
9 |
|
||
З соответствии с правилом, |
|
|
|
|
|
|||
|
qa |
2 |
|
|
|
|
|
|
согласно которому эпюра изгибаю- |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
щего момента строится на растя- |
|
|
Ðèñ. 4.18 |
|
|
|
|
|
нутых волокнах ( З), при вычислении значений этого момента в контролируемых сечениях будем использовать следующие обозначения:
• «кЗ/З» – для растянутых верхних волокон сечения;
• «çêÇ/ |
» – для растянутых нижних волокон сечения; |
• «ãêÇ/ |
» – для растянутых волокон поперечного сечения, распо- |
ложенных слева от вертикальной оси участка;
93

• «кЗ/П» – для растянутых волокон поперечного сечения, расположеных справа от вертикальной оси участка.
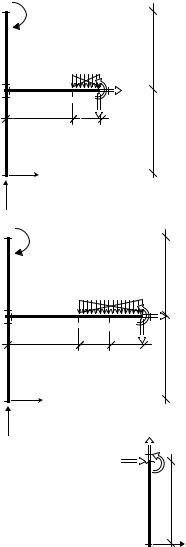
кис. 4.19 иллюстрирует действия по определению значений ординат и положений растянутых волокон в данном примере.
|
4 |
qa2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
5 |
|
|
|
|
q |
|
|
|
3 |
5 |
6 |
|
|
2 qa |
|
2 |
a |
7 |
8 |
|
|
|
|
0,5a |
0,5a |
|
|
|
|
|
|
|
|
a |
|
1 |
|
|
9 |
|
2qa |
|
Q1-2 |
|
|
|
|||
M |
1-2 |
à |
|
|
|
|
|
N1-2 |
|
|
|
||
|
4 |
qa2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
5 |
|
|
|
|
q |
|
|
|
3 |
5 |
6 |
|
|
2 qa |
M |
2 |
Q2-1 |
7 |
8 |
|
|
2-1 |
|
|
|
|
||
|
N |
|
|
a |
|
|
|
|
2-1 |
|
|
|
|
|
|
a |
0,5a |
0,5a |
|
|
|
|
|
|
9 |
|
2qa |
|
|
|
|
|
|
|
|
|
|
á |
|
|
|
|
4 |
qa2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
M |
3 |
Q3-4 |
|
|
|
|
3-4 |
|
|
|
|
||
|
N |
|
|
|
|
|
|
|
3-4 |
â |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.19 (начало) |
|
|
||
∑mom1 |
= M1−2 − qa2 |
− |
||||
− q a |
|
1 |
|
+ |
|
|
a + |
2 |
a |
|
|
||
|
|
|
|
|
|
|
+ 5 qa a = 0 |
|
M |
|
= 0. |
||
2 |
|
|
|
1−2 |
|
|
|
|
|
|
|
|
|
∑mom2 |
|
= M2−1 − qa2 − |
|
|
|||
|
+ |
1 |
|
+ 2qa a |
= 0 |
|
|
− q a |
2 |
a |
|||||
|
|
|
|
|
|
|
|
M2−1 |
= 1 qa(êÇ/ã). |
|
|||||
|
|
|
2 |
|
|
|
|
∑mom3 = M3−4 − qa2 = 0
M3−4 = qa2 (êÇ/ã).
94

|
|
|
|
|
|
|
|
|
N4-3 |
Q4-3 |
|
|
|
|
|
|
|
|
|
|
|
|
M4-3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
q |
5 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
∑mom 4 |
= |
qa 2a + M4−3 |
− |
3 |
5 |
|
6 |
|
|
2 qa |
||||
2 |
2 |
|
|
|
7 |
8 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
− q a F |
1 a + aI − 5 qa a + |
|
a |
a |
0,5a |
0,5 |
a |
||||||
|
|
|
|
G |
2 |
J |
2 |
|
|
|
|
|
|
|
|
|
|
|
H |
K |
|
|
|
|
|
|
|
||
|
+ 2qa 2a = 0 |
|
|
|
1 |
|
|
|
|
|
||||
M4−3 = −qa 2 (êÇ / ã) . |
|
1 |
2 qa |
|
|
|
9 |
2qa |
||||||
|
|
|
|
|
|
|
|
qa |
|
|
|
ã |
|
|
|
|
|
|
|
|
|
|
4 |
qa2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
3 |
M5-6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
N5-6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||
|
|
1 qa a − qa 2 + M5−6 |
|
Q5-6 |
|
|
|
|
|
|||||
∑mom 5 |
= |
= 0 |
1 |
|
a |
|
|
|
||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
M5−6 = |
1 qa 2 |
(êÇ / ç) . |
1 |
2 qa |
|
|
|
|
||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qa |
|
|
|
ä |
|
|
|
|
|
|
|
|
|
|
4 |
qa2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
3 |
5 |
|
M6-5 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
6 |
N6-5 |
|
||
∑mom 6 |
= |
qa a − qa a − |
2 |
|
|
|
Q6-5 |
|
||||||
2 |
|
|
|
|
|
|
||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
− qa + M6−5 = 0 |
|
|
a |
|
|
|
|||||||
|
|
|
|
|
|
|
||||||||
M 6−5= |
3 qa 2 |
(êÇ / ç) . |
1 |
1 qa |
|
|
|
|
||||||
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qa |
|
|
|
å |
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.19 (продолжение) |
|||||
95
|
M |
6-7 = M 6-5 |
, так как сечение 6 не имеет дефектов (через него пере- |
||||||||||||
дается полный набор усилий – M, Q, N) и оно не несет нагрузки в виде |
|||||||||||||||
сосредоточенного момента. |
|
|
|
|
|
|
|
|
|
|
|
||||
4 |
|
qa2 |
|
|
|
∑mom 7 |
= |
1 qa a − qa × |
|
||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
a |
|
|
× |
F |
1 a + aI − qa 2 |
+ q 1 a × |
||||||
|
|
|
q |
|
|
|
|
G |
2 |
|
|
|
|
J |
2 |
|
|
|
|
|
|
|
H |
|
|
|
|
K |
|||
3 |
5 |
6 |
M7-6 |
|
|
|
|
F |
1 |
|
1 |
|
I |
= 0 |
|
|
|
7 N7-6 |
|
|
|
× G |
|
2 |
aJ + M7−6 |
||||||
2 |
|
|
|
|
|
|
H 2 |
|
|
K |
|
||||
|
|
a |
0,5a Q7-6 |
|
|
M7−6 = |
15 |
qa |
2 |
(êÇ / ç) . |
|||||
|
|
|
a |
|
8 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 qa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qa |
|
æ |
|
|
M 7-8 = M 7-6 |
|
по тем же причи- |
||||||||
|
|
|
|
|
íàì, ÷òî è M 6-7 = M 6-5 . |
|
|||||||||
|
|
|
|
|
|
|
|||||||||
4 |
|
qa2 |
|
|
|
|
|
1 qa a − qa 2a − |
|||||||
|
|
|
|
|
∑mom 8 |
= |
|||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
a |
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
q |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
M8-7 |
|
|
− qa |
|
+ q a 2 a + |
|||||||
3 |
5 |
6 |
|
|
|
|
|
||||||||
|
|
7 |
8 N8-7 |
|
+ M8−7 = 0 |
|
|||||||||
2 |
|
|
M8−7 = 2qa 2 (êÇ / ç) . |
|
|||||||||||
|
|
a |
0,5a 0,5a |
Q8-7 |
|
|
|||||||||
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
1 qa |
|
|
|
M 8-9 = M 8-7 |
|
по тем же причи- |
||||||||
1 |
2 |
|
|
|
|
|
|||||||||
|
|
|
|
íàì, ÷òî è M |
6-7 |
= M6-5 . çà ðèñ. 4.19, |
|||||||||
|
|
|
ç |
|
|
||||||||||
qa |
|
|
|
|
è показана проверка этого факта |
||||||||||
|
|
|
|
|
путем формирования уравнения |
||||||||||
|
|
|
N8-9 |
|
|
||||||||||
|
|
|
8 M |
8-9 |
равновесия для другой части рас- |
||||||||||
|
|
|
|
|
четной схемы. |
|
|
|
|
|
|||||
|
|
|
Q8-9 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2qa |
∑mom 8 |
= 2qa a + M8−9 = 0 |
|||||||||
|
|
|
9 |
M8−9 |
= −2qa 2 (êÇ / ã) . |
||||||||||
|
|
|
è |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.19 (продолжение) |
|
|
|
|
|
|
|
|
|
|
|
|
||
96

∑mom 9 = −qa 2a − qa 2 +
+ q a 12 a + 52 qa a + + M 9−8= 0
M9−8 ≡ 0.
Найденные ординаты изгибающего момента используются для построения эпюры изгибающего момента на растянутых волокнах (рис. 4.20, à).
4 |
|
qa2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
5 |
|
|
|
|
|
q |
|
|
|
3 |
5 |
|
6 |
|
|
|
|
2 qa |
2 |
|
a |
|
7 |
|
8 |
|
|
|
|
|
0,5a |
0,5a |
|
|
||
|
|
|
|
|
|
|
a |
|
1 |
|
|
1 |
|
|
9 |
|
|
|
|
2 qa |
|
|
|
Q9-8 |
||
|
qa |
|
M |
9-8 |
|
|||
|
|
|
|
N9-8 |
||||
|
|
ê |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.19 (окончание) |
|
|
||||
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
6 |
|
7 |
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1,0 |
|
|
0,5 |
|
|
1,5 |
|
2,0 |
|
1,5 |
|
|
|
|
|
|
2,0 |
||||
0,5 |
3 |
5 |
|
|
|
|
|
6 |
|
7 |
8 2,0 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
6- |
|
|
|
|
|
|
|
||
0 |
|
Q |
|
|
|
|
|
|
|
|
1,875 |
|
8 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
< |
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
5 |
-6 |
Q |
5>0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1 |
|
|
|
|
Q |
Q6-8 = Q8-6 |
> 0 |
|
|
|
|
|
|||||||||
- |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
2 |
|
|
|
|
|
6- |
|
8 |
1,875 |
Q |
|
<0 |
|||||||||
Q |
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
8-6 |
|||||
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
||||||
= |
1 |
|
|
|
|
|
|
, qa |
2 |
|
9 |
|
|
|
|
M |
, qa |
2 |
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
||||||||
2 |
|
|
|
|
M |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
- |
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
||||||
1 |
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
6-8 |
|
|
|
|
||
Q |
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
< |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
à |
|
|
|
|
|
|
|
|
á |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ðèñ. 4.20 |
|
|
|
|
|
|
|
|
|
Вычисление ординат Q i-j эпюры поперечного усилия включает:
• разложение криволинейной эпюры изгибающих моментов каждого участка на линейную часть и параболическую (см. рис. 4.20, );
•вычисление модулей тангенсов соответствующих углов по формулам, которые являются интерпретацией зависимости tgα(M) =
=dM/dx = Q;
•присвоение «инженерного» знака вычисленным значениям (см. рис. 4.20, á).
Для всех участков эпюры изгибающего момента рассматриваемого примера соответствующие действия представлены формулами:
97
|
Q1−2 |
= ± tgM(l1−2) |
= − |
|
1 |
− |
|
|
|
2 |
/ a |
= − |
1 |
qa = Q2−1; |
|
|
|||||||||||||||||
|
|
2 |
0 qa |
|
2 |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Q |
3 |
−4 |
|
= ± tgM(l |
3 |
−4 |
) |
= |
|
1 |
−1 |
qa2 / a = 0 |
= Q |
4 |
− 3 |
; |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
( |
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Q5−6 |
|
= ± tgM(l5−6) |
|
|
|
|
3 |
− |
1 |
|
|
2 |
/ a |
= +qa = Q6−5; |
|
|
||||||||||||||||
|
|
= + |
2 |
2 |
qa |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Q6−8 |
|
= ± tgM (l6−8) ± tgM (ò.6) |
= |
|
|
|
|
|
|
|
|
(4.7) |
||||||||||||||||||||
|
= + |
|
2 − |
3 |
|
2 |
/ a |
+ |
1 |
q6−8 |
|
l6−8 |
= + |
1 |
qa + |
1 |
q a |
= +qa; |
|
|
|||||||||||||
|
|
2 |
qa |
|
|
2 |
|
2 |
2 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Q8−6 |
|
= ± tgM (l8−6) ± tgM (ò.8) |
= |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
= + |
|
2 − |
3 |
|
2 |
/ a |
− |
1 |
q8−6 |
|
l8−6 |
= + |
1 |
qa − |
1 |
q a |
= 0; |
|
|
|||||||||||||
|
|
2 |
qa |
|
|
2 |
|
2 |
2 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Q8−9 |
|
= ± tgM(l8−9) |
= − (2 − 0)qa2 / a = −2qa = Q9−8. |
|
|
|||||||||||||||||||||||||||
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ïî |
|
результатам |
вычислений |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.7) построена |
эпюра |
поперечного |
|||||||||||
|
0,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
усилия, изображенная на рис. 4.21. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычисление ординат Ni-j ýïþ- |
||||||||||
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
– |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
ры продольного усилия проводится |
|||||||||||||
|
2 |
5 |
|
|
6 |
|
|
7 |
|
|
|
|
|
|
|
|
|
|
на основе данных с эпюры Q |
è |
|||||||||||||
0,5 |
|
|
|
|
|
2,0 |
|
|
|
|
|
|
|
|
|
|
|
|
включает: |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• выявление иерархической |
||||||||||||
|
|
|
1 |
|
Q , qa |
|
|
|
|
|
|
|
9 |
|
|
|
|
|
последовательности узлов, содер- |
||||||||||||||
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
жащих не более двух продольных |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
– + |
|
|
|
|
|||||||||||||||||||
|
+ |
|
|
|
|
|
|
|
|
|
|
|
усилий (первичная последователь- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ность включает узлы 1, 4, 8 и 9; вто- |
|||||||||||
|
|
|
|
|
Ðèñ. 4.21 |
|
|
|
|
|
|
|
|
|
|
|
|
ричная последовательность вклю- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
÷àåò óçåë 2-3-5; |
|
|
|
||||||||
•формирование уравнений равновесия в проекциях на оси глобальной системы координат для каждого из узлов последовательности
ñучетом действующих в узле внешних сосредоточенных сил;
•вычисление ординат продольных усилий в узле и присвоение им «инженерного» знака;
•сравнение усилий на одном и том же участке, полученных из условий равновесия разных узлов (например, проверка равенства уси-
N ëèé 5-8 è N 8-5 , полученных из равновесия узлов 2-5-3 и 8). Указанная последовательность действий, реализованная для рас-
сматриваемого примера, приведена на рис. 4.22.
98

∑Y = N1−2 + qa = 0 N1−2 = −qa.
∑Y = N4−3 = 0 N4−3 = 0.
∑X = −N8−5 + 2qa − 52 qa = 0
N8−5 = − 12 qa;
∑Y = −N8−9 = 0 N8−9 = 0.
∑Y = N9−8 = 0 N9−8 = 0.
∑X = 12 qa + N 5−6 = 0 N5−6 = − 12 qa.
По результатам вычислений, проведенных на базе данных рис. 4.22 построена эпюра продольных усилий (рис. 4.23).
Нетрудно убедиться, что усилия N 5-8 (вычисленное как N 5-6 ) и усилие N 8-5 совпадают и по знаку и по значению. Обратите также внимание на то, что реакция X B включена в состав сил, обеспечи- вающих равновесие узла 8.
–
+
1,0
1 qa |
N1-2 |
|
|
|
1 |
||
2 |
|
||
1 |
2 qa |
||
|
|||
à |
|
qa |
|
|
|
qa2 |
|
4 |
|
qa2 |
|
N4-3 |
|
á |
5 qa |
2qa2 q |
|
8 |
2 |
N8-5 |
2qa |
â2qa2  N8-9
N8-9
2qa N9-8 

9 |
2qa |
|
|
ã |
|
|
|
|
N3-4 |
qa |
1 |
2 |
|
|
|
|
|
|
|
||
|
1 |
|
qa 2 |
3 |
5 |
2 qa |
|
|
2 |
qa |
2 |
|
N5-6 |
||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
ä |
qa |
2 qa |
|
|||
|
|
|
Ðèñ. 4.22 |
|
|
||
4 |
|
|
|
|
|
|
|
0,0 |
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
2 |
5 |
|
6 |
7 |
8 |
|
|
|
|
|
|
|
|
0,0 |
|
|
1 |
|
N , qa |
|
|
||
|
|
|
|
|
|
9 |
|
– + |
|
|
|
|
|||
|
|
|
|
|
|||
|
|
Ðèñ. 4.23 |
|
|
|
||
99

|
|
qa2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
5 qa |
0,5a |
|
|
5 |
|
|
6 |
|
|
||
|
3 |
|
|
|
|
2 |
|
||
|
|
|
|
|
|
|
|
||
1 |
2 |
|
|
|
C |
7 |
8 |
B |
0,5a |
|
|
|
|
0,5a |
0,5a |
||||
2 qa |
1 |
qa |
2 |
|
|
|
2qa |
||
|
|
4 |
|
|
|
|
|
|
|
|
qa |
a |
|
|
a |
qa2 |
|
||
|
|
|
|
|
Ðèñ. 4.24 |
|
|
|
|
Контроль правильности определения ординат эпюр усилий для заданной расчетной схемы проводится для произвольной части расчетной схемы (рис. 4.24). Соответствующие уравнения равновесия и вычисления по ним представлены формулами:
∑X = 0,5qa − 2,5qa + 2qa ≡ 0;
∑Y = qa − q a ≡ 0;
∑momC = 0,25qa 2 + 0,5qa 12 a −qa a − qa 2 − q a 12 a +
+ 2qa 12 a + qa 2 = −(1 +1 + 0,5) qa 2 +
+ (0,25 + 0,25 +1 +1) qa 2 ≡ 0; |
(4.8) |
∑mom B = 0,5qa 12 12 a + 0,25qa 2 − qa 2a − qa 2 +
+q a 12 a + 52 qa 12 12 a + 2qa 12 12 a + qa 2 =
= −(2 +1) qa 2 + (81 + 14 + 12 + 85 + 12 +1) qa 2 ≡ 0.
Уравнения равновесия отрезанной части заданной расчетной схемы удовлетворяются тождественно, что свидетельствует о значи- тельной достоверности проведенных построений.
Стоит обратить внимание на выражение «значительная достоверность», поскольку полную уверенность в правильности полученных результатов может дать только независимое решение этой же задачи другим методом. Ниже, в соответствующих главах учебника, такие методы излагаются – это метод перемещений и метод конечных элементов.
Тем не менее, если проводить все операции промежуточного и итогового контроля, включая те, что отображены в операционном алгоритме, можно утверждать, что в случае положительного итога каждой из предусмотренных контрольных операций уверенность в правильном решения задачи будет близка к 100%.
100

Решение задачи о построении эпюр усилий в ломаном брусе представлено рис. 4.13, рис. 4.20, à, рис. 4.21 и рис. 4.23. Будучи собранными вместе (рис. 4.25), эти рисунки представляют собой собственно ре¯ение задачи, поскольку, в конечном итоге, путь получения необходимых данных (ординат M, Q è N) может быть и иным. А форма решения, представленная на рис. 4.25, содержит все данные, необходимые специалисту для обоснования и принятия проектного решения.
 qa2
qa2
|
|
|
|
q |
a |
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
a |
|
a |
2qa |
|
|
|
|
||
|
|
|
à |
|
|
|
4 |
|
|
|
|
|
0,0 |
1,0 |
|
|
|
+ |
|
|
|
|
|
3 |
|
|
|
8 |
|
– |
|
|
|
||
2 |
5 |
6 |
7 |
|
|
0,5 |
|
2,0 |
|
|
|
|
|
Q , qa |
|
9 |
|
|
– 1+ |
|
|
||
|
|
|
– + |
||
|
|
|
â |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
1,0 |
|
|
0,5 |
|
1,5 |
|
2,0 |
|
|
||||
0,5 |
3 |
5 |
|
|
|
|
6 |
|
7 |
|
8 2,0 |
||
2 |
|
|
|
|
|
|
|
|
|
|
|||
2 |
|
Q |
|
|
|
|
5 |
> |
|
|
8 |
|
1,875 |
0 |
|
|
|
|
= |
|
|
|
|
Q |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
< |
|
5 |
-6 |
|
Q |
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
6- |
|
0 |
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
= |
1 |
|
|
|
|
M , qa |
2 |
|
=Q |
9 |
|
||
2 |
|
|
|
|
|
|
|
||||||
- |
|
|
|
|
|
|
|
|
|||||
1 |
|
|
|
|
|
|
|
9 |
|
|
|||
Q |
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
< |
|
||
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
á |
|
|
|
|
|
4 |
|
0,0 |
0,5 |
|
–3
+ 2 5 |
6 7 8 |
|
1,0 |
0,0 |
|
1 |
N , qa |
|
9 |
||
– + |
||
|
ã
Ðèñ. 4.25
На рис. 4.26 приведен операционный алгоритм решения поставленной задачи, реализованный в данном примере.
Обратите внимание, что этот алгоритм отличается от операционного алгоритма для балки, приведенного в п. 4.1, лишь операциями, необходимыми для построения эпюры продольного усилия N.
101

102
Виды уравнений |
|
|
|
|
|
|
Глобальная |
|
|
|
|
|
|
|
|
|
|||||
равновесия |
|
|
|
|
|
|
|
|
|
|
Оптимальны |
|
Реакции |
|
|
|
|
||||
|
|
|
|
|
|
|
|
система |
|
|
|
|
|
|
|
||||||
на плоскости. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
координат |
|
|
й объем |
|
определены |
|
|
|
|
||||
Виды опорных связей , |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
(ГСК) |
|
|
|
вычислений |
|
верно |
|
|
|
|
|||||
их изображения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
*А |
|||||
|
|
[l k] = a; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Рис. 4.13. |
|
|
|
Рис. 4.14. |
Рис. 4.15. |
Рис. 4.16. |
Ф.4.5. |
Рис. 4.17. |
Ф. 4.6. |
|
|
Рис. 4.18. |
|||||||
|
|
|
|||||||||||||||||||
|
|
[q k] = q; |
Заданная |
|
|
|
Опорные |
Опорные |
Система |
Система |
Определени |
Проверка |
|
|
Система |
||||||
|
|
[P k] = qa; |
расчетная |
|
|
|
стержни |
реакции |
нагрузок в |
уравнений |
е реакций |
правильност |
|
|
нагрузок |
||||||
|
|
[M k] = qa 2. схема (ЗРС) |
|
|
|
|
|
обозна- |
для опорных |
опорных |
и |
|
|
в значениях |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
чениях |
реакций |
связей |
определения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
опорных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
реакций |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ошибки в определении реакций |
|
|
|
|
|
Рис. 4.25. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поиск и исправление ошибок |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Заданная |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Эпюры |
|
|
|
расчетная |
|
|
|
|
|
|
|
|
|
|
Рис. 4.20, |
Рис. 4.20. |
Рис. 4.18, |
|
построены |
|
|
|
схема. |
|||
|
|
Рис. 4.18. |
|
|
|
|
|
|
|
рис. 4. 21. |
|
верно |
|
|
|
Эпюры M, Q, N. |
|||||
|
|
*А |
|
|
|
|
|
|
|
а. |
|
|
|
|
|
|
|
|
|
|
|
|
Номера |
Рис. 4.19. |
Рис. 4.20, |
Рис. 4.20, б. |
Ф. 4.7. |
|
Рис. 4.21. |
Рис. 4.22. |
Рис. 4.23. |
Ф. 4.8 , |
|
|
|
|
|||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|||||||||||||||||
|
контроли- |
Определени |
а. |
Знаки |
Опреде- |
Эпюра Q |
Определени Эпюра N |
рис. 4.24. |
|
|
|
|
|||||||||
|
руемых |
е значений |
Эпюра M |
поперечного ление |
|
|
е значений |
|
Проверка |
|
|
|
|
||||||||
|
сечений |
изгибающего |
|
|
|
|
|
усилия Qi-j |
значений Qi-j |
Ni-j |
|
правильност |
|
||||||||
|
|
|
момента Mi-j |
|
|
|
|
|
|
|
|
|
|
|
|
и эпюр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ошибки в определении усилий |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поиск и исправление ошибок |
|
|
|
|
|
||
Ðèñ. 4.26