

- •Предисловие
- •5. Работа внутренних сил плоской стержневой системы
- •6. Принцип возможных перемещений и упругие системы
- •9. Теорема о взаимности перемещений
- •10. Теорема о взаимности реакций
- •11. Теорема о взаимности реакций и перемещений
- •14. Теорема Лагранжа
- •18.1. Понятие о матрице перемещений
- •18.2. Вычисление интегралов формулы Мора в матричной форме в случае произвольных подынтегральных функций
- •18.4. Определение перемещений от силового воздействия
- •18.5. Определение перемещений от температурных воздействий
- •18.6. Определение перемещений от кинематических воздействий
- •1.7. Определение перемещений от совместных воздействий различного характера
- •5.1. РАСЧЕТ ОДНОПРОЛЕТНОЙ БАЛКИ
- •5.2. РАСЧЕТ ЛОМАНОГО БРУСА
- •5.3. РАСЧЕТ ТРЕХШАРНИРНОЙ РАМЫ
- •5.4. РАСЧЕТ ФЕРМЫ С ТРЕУГОЛЬНОЙ РЕШЕТКОЙ (АНАЛИТИЧЕСКИЙ СПОСОБ)
- •5.5. РАСЧЕТ ФЕРМЫ С ТРЕУГОЛЬНОЙ РЕШЕТКОЙ (ГРАФИЧЕСКИЙ СПОСОБ)
- •6.1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ ЗАДАННОЙ РАСЧЕТНОЙ СХЕМЫ
- •6.2. ЗАМЕНЯЮЩАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ ЭЛЕМЕНТАРНЫХ РАСЧЕТНЫХ СХЕМ
- •6.3. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ
- •6.7. ПРОВЕРКА ПОЛУЧЕННОГО РЕШЕНИЯ ЗАДАЧИ
- •7.2. ПОСТРОЕНИЕ НАПРАВЛЯЮЩИХ ЭПЮР
- •7.3. РЕАЛИЗАЦИЯ МАТРИЧНОЙ ФОРМЫ ВЫЧИСЛЕНИЯ ПЕРЕМЕЩЕНИЙ
- •7.3.1. РАЗРАБОТКА СХЕМЫ ДИСКРЕТИЗАЦИИ
- •7.3.2. МАТРИЧНАЯ ФОРМА ПРЕДСТАВЛЕНИЯ ГРУЗОВОЙ И НАПРАВЛЯЮЩЕЙ ЭПЮР
- •7.3.3. ПОСТРОЕНИЕ МАТРИЦЫ ПОДАТЛИВОСТИ
- •7.3.4. ПРИЕМЫ МИНИМИЗАЦИИ РАЗМЕРОВ МАТРИЦЫ ПОДАТЛИВОСТИ
- •7.4. ПРОВЕРКА ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ
- •8.1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ ЗАДАННОЙ РАСЧЕТНОЙ СХЕМЫ
- •8.2. КЛАССИФИКАЦИЯ СТЕРЖНЕЙ РЕШЕТКИ ФЕРМЫ
- •8.3. ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ГРАФИЧЕСКИМ СПОСОБОМ
- •8.5. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ НА ОСНОВЕ ЛИНИЙ ВЛИЯНИЯ
- •9.1. ПОСТАНОВКА ЗАДАЧИ РАСЧЕТА
- •9.3. ВЫБОР ОСНОВНОЙ СИСТЕМЫ МЕТОДА СИЛ
- •9.4. КАНОНИЧЕСКАЯ СИСТЕМА УРАВНЕНИЙ МЕТОДА СИЛ
- •9.5. МАТРИЧНАЯ ФОРМА МЕТОДА СИЛ
- •9.5.1. РАЗРАБОТКА СХЕМЫ ДИСКРЕТИЗАЦИИ
- •9.5.4. ФОРМИРОВАНИЕ КАНОНИЧЕСКОЙ СИСТЕМЫ УРАВНЕНИЙ
- •9.5.5. РЕШЕНИЕ КАНОНИЧЕСКОЙ СИСТЕМЫ УРАВНЕНИЙ
- •9.7. КОНТРОЛЬ ПРАВИЛЬНОСТИ РЕШЕНИЯ ЗАДАЧИ
- •10.1. ПОСТАНОВКА ЗАДАЧИ РАСЧЕТА
- •10.2. НАЗНАЧЕНИЕ СИСТЕМЫ ДОПОЛНИТЕЛЬНЫХ СВЯЗЕЙ ДЛЯ СОЗДАНИЯ ЗАМЕНЯЮЩЕЙ СИСТЕМЫ ОДНОПРОЛЕТНЫХ БАЛОК
- •10.3. ОСНОВНАЯ СИСТЕМА МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.4. КАНОНИЧЕСКАЯ СИСТЕМА УРАВНЕНИЙ МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.5 СТАНДАРТНЫЕ ЭПЮРЫ МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.6. ГРУЗОВАЯ И ЕДИНИЧНЫЕ ЭПЮРЫ МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.7. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ КАНОНИЧЕСКОЙ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА ПЕРЕМЕЩЕНИЙ
- •10.9. ОПРЕДЕЛЕНИЕ ОРДИНАТ ЭПЮРЫ ИЗГИБАЮЩЕГО МОМЕНТА В ЗАДАННОЙ РАСЧЕТНОЙ СХЕМЕ
6.4. ПРОВЕРКА ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ
Проверку полученных результатов (косвенную) можно провести, построив деформированное состояние ЗРС по полученным значениям и знакам переме ений и сравнив затем полученную картину с деформи-
˘рую им воздействием приложенных к ЗРС нагрузок.
При выполнении построения деформированного состояния нужно учитывать наложенные на ЗРС внешние и внутренние связи, а также непрерывность и малую величину переме ений точек осей. Схема деформирования, построенная по результатам решения задачи о вычис-
лении переме |
ений сечения «Д», представлена на рис. 6.11. |
|||
|
|
ux |
|
Днализ поведения ЗРС под действую- |
ϕ |
z |
|
˘ей нагрузкой проводится на основании сле- |
|
|
3 |
5 ˘ |
дую их соображений: |
|
|
|
|||
uy |
|
|
qa |
• наличие шарнирно-подвижной опоры |
A' |
2 |
в узле 1 при действии сосредоточенной силы |
||
|
6 |
qa приводит к отклонению шарнира 6 влево |
||
|
|
|||
|
|
|
qa |
и вниз (иначе не сохранить длину участка |
|
|
|
|
6-7), подталкивая в этих же направлениях и |
17 узел 2; движению вниз препятствует сосре-
˘ |
доточенный изгибаю ий момент qa 2, îäíà- |
Ðèñ. 6.11 |
ко, вероятно, его воздействие, как показыва- |
|
ют полученные результаты, недостаточно; |
•воздействие нагрузки q также «помогает» движению вниз, а учи- тывая «подталкивание» сосредоточенной силы – и влево;
•с учетом малости переме˘ений и их непрерывного характера на рис. 6.11 отражены свойства жестких узлов 3 и 5, жесткой части узла 2 (между сечениями второго этажа) и шарнирных узлов 1, 6, а также наличие шарнира между сечениями второго и третьего этажей в узле 2.
Таким образом, полученные результаты обладают определенной степенью достоверности, как показывает проведенный выше, к сожалению, весьма приблизительный анализ деформированного состояния ЗРС.
Что касается достоверности числовых результатов, то, как правило, вычисления в матричном виде проводятся с помо˘ью ЭВМ. Нетрудно заметить, что намного про˘е сформировать матрицы по результатам построения эпюр, нежели вычислять интеграл Мора с помо- ˘ью разного рода формул, ориентированных на вычисления вручную (например, по правилу перемножения эпюр).
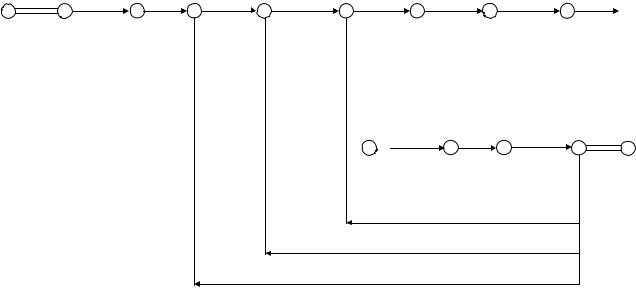
На рис. 6.12 приведен операционный алгоритм, положенный в ос-
нову решения задачи о вычислении переме ений от действия статической нагрузки. Это алгоритм и был реализован в задаче примера.
168
Алгоритмы
построения
эпюр
определяющих
усилий в элементарных расчетных схемах
Рис. 6.1. |
Рис. 6.3. |
Заданная |
Схемы |
расчетная |
нагружения |
схема и |
ЗРС |
положение |
единичными |
сечения А. |
(направля- |
Рис. 6.2. |
ющими) |
Эпюра |
нагрузками |
изгибающих |
|
моментов |
|
от заданной |
|
нагрузки |
|
(грузовая). |
|
|
Характер |
|
|
|
|
|
|
грузовой и |
Рис. 6.10. |
|
|
Сечения |
|
|
направляющих |
|
|
|
||
Система |
эпюр |
Схема |
Стандартные |
Блочная |
с нулевыми |
|
на общих |
дискретизации. |
и совпадающими |
Правила |
|||
контроли- |
участках; |
Грузовая |
матрицы |
структура |
значениями |
|
руемых |
правило |
и направляющие |
податливости |
матрицы |
изгибающего |
перемножения |
сечений |
знаков |
эпюры |
участков |
податливости |
момента |
матриц |
Рис. 6.4-6.8. |
|
Ф. (6.1). |
Ф. (6.2)-(6.3). |
Ф. (6.4). |
Ф. (6.5)-(6.6). |
*А |
|
Рис. 6.9. |
Ф. (6.7). |
||||||
Реализация |
Матричная |
Формирование |
Матрица |
Минимизация |
Вычисление |
||
алгоритма |
Схема |
форма |
матриц |
податливости |
размеров |
перемещений |
|
построения |
дискретизации |
грузовой и |
податливости |
ЗРС |
|
матрицы |
сечения |
эпюры |
ЗРС |
направляющей |
участков |
|
|
податливости |
|
изгибающих |
|
эпюр |
|
|
|
|
|
моментов |
|
|
|
|
|
|
|
от каждой |
|
|
|
|
|
|
|
единичной |
|
|
|
|
|
|
|
нагрузки |
|
|
|
|
|
|
|
в ЗРС |
|
|
Результаты |
|
Характер |
Соответствие |
Ф. (6.7), |
(направ- |
|
|
|
характера |
рис. 6.11. |
||
ляющие |
|
|
вычисления |
|
нагрузки |
нагрузки |
Решение |
эпюры) |
|
|
перемещений |
в ЗРС |
и деформаций |
задачи |
|
|
|
|
*А |
|
Анализ |
Контроль |
|
|
|
|
Рис. 6.11. |
|
|
||
|
|
|
Построение |
|
деформи- |
правильности |
|
|
|
|
деформиро- |
|
рованной |
проведенных |
|
|
|
|
ванной |
|
схемы |
построений |
|
|
|
|
схемы ЗРС |
|
|
|
|
|
|
|
Ошибки в формировании матрицы податливости |
|
|||
|
|
|
Поиск и исправление ошибок |
|
|||
|
|
Ошибки в использовании схемы дискретизации |
|
|
|||
|
|
|
Поиск и исправление ошибок |
|
|
||
|
Ошибки в разбиении ЗРС на участки |
|
|
|
|
||
|
|
Поиск и исправление ошибок |
|
|
|
||
169
Ðèñ. 6.12

|
|
Г |
|
|
|
|
8 |
|
|
|
|
|
|
|
Л А В А |
|
|
||
|
|
CHAPTER 1 |
|
Расчёт ферм |
|
|
|||
|
|
сложной кинематической |
|
|
|||||
|
|
Г Л А В А 7 |
|
структуры |
P |
||||
|
РАСЧЕТ |
ФЕРМЫ |
|
|
à |
aP |
Pa− |
||
СО СЛОЖНОЙ |
СТРУКТУРОЙ |
РЕШЕТКИ |
= |
, |
= ; |
|
|||
|
|
|
− |
≈ . |
|
||||
Исходные данные для решения задачи расчета фермы приведены |
|
||||||||
на рис. 7.1. Требуется определить усилия в стержнях O1, U1, V2, D1, D2. |
|
||||||||
h |
|
|
|
|
|
|
|
|
|
l |
l |
l |
l |
l |
|
l |
|
|
|
h
|
|
O1 |
|
O2 |
D2 |
|
V2 |
|
|
V1 |
|
|
D1 |
|
D4 |
D3 |
U1 |
|
U2 |
Ðèñ. 7.1
N
Для получения схемы индивидуального задания при нижнем грузовом поясе фермы примем следую˘ие значения параметров задачи:
l = αa, α = 1; h = βa, = 1; P = q l, = 3.
ЗРС, построенная по этим данным, приведена на рис. 7.2 (усилия в стержнях O1, U1, V2, D1, D2 обозначены: N7-13, N10-12, N9-11, N9-13, N13-14).
a
a |
a a |
a a |
a |
3a |
3a |
a
|
|
|
|
|
|
13 |
|
|
|
|
|
|
7 |
|
|
|
|
|
19 |
1 |
|
|
|
9 |
|
|
|
17 |
|
5 0, P |
3 |
5 |
|
11 |
|
15 |
|
||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
2 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
25
21 23 0,5P
22 |
24 |
26 |
P P P
Ðèñ. 7.2
170

7.1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ ЗАДАННОЙ РАСЧЕТНОЙ СХЕМЫ
Расчет начинаем с проведения кинематического анализа. Число степеней свободы подсчитывается по формуле
W = 2ì − S − C0 , |
(7.1) |
ãäå ì – число узлов фермы (ì = 26), S – число ее стержней (S = 49; 4 стержня верхнего пояса: 1-7, 7-13, 13-19, 19-25; 12 стержней нижнего пояса: 2-4, 4-6, 6-8, 8-10, 10-12, 12-14, 14-16, 16-18, 18-20, 20-22, 22-24, 24-26; 13 стержней-стоек и полустоек: 1-2, 3-4, 5-6, 7-8, 9-10, 11-12, 13-14, 15-16, 17-18, 19-20, 21-22, 23-24, 25-26; 20 стержней-раскосов и полураскосов: 2-5, 3-7, 1-3, 3-5, 5-8; 8-11, 9-13, 7-9, 9-11, 11-14; 20-15, 17-13, 19-17, 17-15, 15-14; 26-21, 23-19, 25-23, 23-21, 21-20), C0 — число опорных стержней (C0 =3 – один в узле 2 и два в узле 26); откуда получаем
W = 2 26 − 49 − 3 = 0.
Таким образом, ЗРС обладает свойством статической определимости. Проверку свойства мгновенной неизменяемости проведем на основе анализа структуры решетки ЗРС. Для этого выделим основную решетку треугольной структуры и элементы-вставки (в примере – это
шпренгели).
Учитывая, что узлы нижнего пояса 6, 12, 16 и 22 свою нагрузку передают в узлы нижнего же пояса 2(P/3)-8(2P/3), 8(P/3)-14(2P/3), 14(2P/3)-20(P/3), 20(2P/3)-26(P/3) через узлы 5, 11, 15 и 21 соответственно, перечисленные узлы принадлежат одноэтажным шпренгелям (рис. 7.3, à).
2 |
5 |
|
|
|
P |
2P/3 |
P |
|
|
|
8 |
2P/3 |
13 |
2P/3 |
|||
|
6 |
|
|
19 |
||||
|
|
|
7 |
|
||||
|
|
|
1 |
|
25 |
|||
|
à P |
|
|
|
|
|
||
|
7 |
|
5P/6 |
|
|
|
5P/6 |
|
1 |
|
|
2 |
8 |
14 |
20 |
26 |
|
|
|
|
||||||
|
3 |
|
|
|
2P |
7P/3 |
2P |
|
|
4 |
8 |
|
|
|
â |
|
|
|
Pá |
|
|
|
|
|
|
|
|
|
|
|
Ðèñ. 7.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нагрузка на узлы нижнего пояса 4, 10, 18 и 24 передается в узлы |
|||||||
верхнего пояса 1(2P/3)-7(P/3), 7(2P/3)-13 (P/3), 13 (P/3) -19 (2P/3) è 19 (P/3)-25 (2P/3) через узлы 3, 9, 17 и 23 соответственно, что характерно для вставки в форме двухэтажного шпренгеля (см. рис. 7.3, á).
Удаление всех шпренгелей из решетки ЗРС позволяет указать основную решетку ЗРС (см. рис˘ . 7.3,),âимею ую ясно выраженную тре-
171