

Критерий устойчивости Михайлова
Из выражения (6) следует, что если все корни характеристического уравнения лежат в левой полуплоскости, т.е. m=0 , то
![]() .
.
Отсюда следует первая формулировка критерия Михайлова.
Система автоматического управления устойчива, если при возрастании частоты от - до + изменение аргумента вектора D(j) будет равно n, где n- порядок характеристического уравнения.
Вектор D(j)можно представить в виде
![]() .
.
Вещественная составляющая этого выражения является четной функцией, а мнимая - нечетной функцией частоты, т.е. U(-)=U(); V(-)= -V() иD(- j)=U() - jV().
Отсюда следует, что кривая Михайлова симметрична относительно вещественной оси, и при ее построении можно ограничиться диапазоном частот от 0до +.Изменение аргумента вектораD(j)при этом уменьшится в два раза и формулировка критерия Михайлова будет следующей.
Система автоматического управления устойчива, если при возрастании частоты от 0 до + вектор D(j) повернется на угол n/2 или, что то же самое, если кривая Михайлова при том же изменении частоты, начиная с положительной вещественной полуоси, обходит последовательно в положительном направлении n квадрантов и заканчивается в n-м квадранте (рис.6).
Если хотя бы один квадрант пропущен (рис.7), то система неустойчива.
Наблюдая за поведением кривой Михайлова для устойчивой САУ, можно заметить, что при ее прохождении через nквадрантов корни уравненийU()=0иV()=0 чередуются между собой, т.е. между двумя корнями уравненияV()=0лежит один корень уравненияU()=0.
Система автоматического управления устойчива, если корни уравнений V()=0 и U()=0 вещественные и перемежаются между собой.
Система может находиться на границе устойчивости и этому соответствуют два случая:
1) характеристическое уравнение системы имеет один нулевой корень, что будет при аn=0; кривая Михайлова при этом выходит из начала координат;
2) характеристическое
уравнение имеет пару чисто мнимых корней
![]() jkиD(jk)=U(k)+jV(k)=0,
что может быть только, если
одновременноU(k)=0
иV(k)=0;это означает, что кривая Михайлова
проходит через начало координат.
jkиD(jk)=U(k)+jV(k)=0,
что может быть только, если
одновременноU(k)=0
иV(k)=0;это означает, что кривая Михайлова
проходит через начало координат.

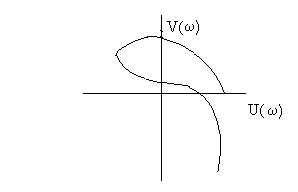
Рис. 6. Кривые Михайлова для Рис. 7. Кривая Михайлова для
устойчивых САУ неустойчивой САУ
Пример.Используя критерий Михайлова, оценить устойчивость системы
Пусть характеристическое уравнение замкнутой системы имеет вид
![]() .
.
Сделаем замену p=jи выделим вещественную и мнимую части
![]() .
.
Построенная при заданных ранее параметрах системы кривая Михайлова имеет вид, показанный на рис.8.
Кривая начинается на вещественной положительной полуоси, проходит последовательно 4 квадранта и заканчивается в 4-м квадранте. Следовательно, при данных параметрах исследуемая система устойчива.
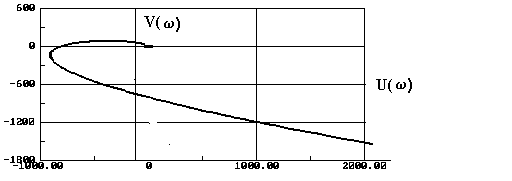
Рис. 8. Годограф Михайлова
Критерий устойчивости Найквиста
Критерий устойчивости Найквиста позволяет судить об устойчивости замкнутой системы по виду АФЧХ разомкнутой системы.
Пусть передаточные
функции разомкнутой и замкнутой системы
имеют вид:
![]() ;
;![]() .
.
Введем функцию
![]() ,
,
где D(p) -характеристический полином замкнутой системы. Перейдя к частотным представлениям, получим
 .
.
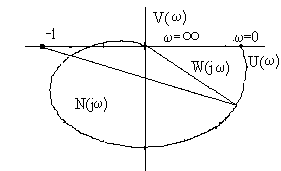
Вектор N(j)называется вектором Найквиста. Очевидно, что числитель и знаменатель этого вектора имеют один и тот же порядокn.При использовании критерия Найквиста следует различать два случая.
1) Разомкнутая система устойчива и ее характеристическое уравнение A(p)=0 имеет все корни в левой полуплоскости. Тогда при изменении частоты от 0 до
![]() .
.
Изменение аргумента вектора D(j) в общем случае равно
![]() ,
,
где m - число корней уравнения D(p)=0, лежащих в правой полуплоскости.
Изменение аргумента вектора Найквиста будет
![]() .
.
Если замкнутая система устойчива, то m=0и
![]() .
.
Так как при , W(j)0,то N(j)1. Рассмотрим рисунок 9,а, где изображена кривая Найквиста, которая описывается вектором Найквиста при изменении частоты от 0 до. Нетрудно убедиться, что вектор Найквиста опишет угол, равный нулю только в случае, если его годограф не охватывает начало координат. Перенесем начало координат в точку с координатами(1,j0)(рис.9,б). Можно убедиться, что изменение аргумента вектора Найквиста будет равно нулю если АФЧХWр(j) разомкнутой системы не охватываеткритическую точку с координатами (-1,j0).










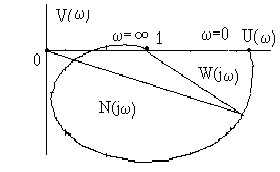
а) б)
Рис. 9. К определению критерия Найквиста
Критерий Найквиста для рассматриваемого случая формулируется следующим образом.
Система автоматического управления, устойчивая в разомкнутом состоянии, будет устойчивой и в замкнутом состоянии, если АФЧХ Wр(j) разомкнутой системы при изменении частоты от 0 до не охватывает критическую точку с координатами (-1, j0).
Особенности возникают, если разомкнутая система нейтрально-устойчива, т.е.
![]() ,
,
где полином A1(s)имеет все корни в левой полуплоскости. При=0 АФЧХ разомкнутой системыW(j)=и проследить поведение кривой АФЧХ в окрестности этой точки невозможно. При изменении частоты от -до +наблюдается движение корней вдоль мнимой оси снизу вверх и при=0происходит бесконечный разрыв. При этом движении обойдем нулевой корень (рис.10) по полуокружности бесконечно малого радиусатак, чтобы этот корень остался слева, т.е. искусственно отнесем его к левой полуплоскости.









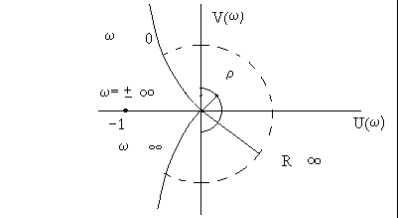
Рис. 10. Годограф Найквиста для нейтрально- устойчивой САУ
При движении по этой полуокружности в положительном направлении независимая переменная изменяется по закону
![]() ,
,
где фаза ()изменяется от -/2до +/2.Подставив это выражение в передаточную функцию вместо множителяpв знаменателе, получим
![]() ,
,
где R при0, а фаза() изменяется от+/2до -/2. Следовательно, в окрестности нулевого корня годографW(j) представляет собой часть окружности бесконечно большого радиуса, движение по которой происходит при увеличении частоты в отрицательном направлении.
Для оценки устойчивости замкнутой системы, если разомкнутая система нейтрально устойчива, необходимо АФЧХ W(j) разомкнутой системы дополнить дугой бесконечно большого радиуса, начиная с меньших частот, в отрицательном направлении и для полученной замкнутой кривой воспользоваться критерием Найквиста для систем, устойчивых в разомкнутом состоянии.
2) Разомкнутая система неустойчива. В этом случае
![]() ,
,
где s -число корней характеристического уравнения разомкнутой системы, лежащих в правой полуплоскости. Если замкнутая система устойчива, т.е.m=0, то
![]() ,
,
т.е. АФЧХ разомкнутой системы охватывает критическую точку (-1,j0) в положительном направлении ровно s / 2 раз.
Система, неустойчивая в разомкнутом состоянии, будет устойчивой в замкнутом состоянии, если АФЧХ W(j с) разомкнутой системы при изменении частоты от 0 до охватывает критическую точку (-1,j0) в положительном направлении ровно s/2 раз, где s - число правых полюсов разомкнутой системы.
Определение числа охватов критической точки - непростая задача, особенно в случае систем высокого порядка. Поэтому в практических приложениях нашла применение другая формулировка критерия Найквиста для рассматриваемого случая.
Переход годографа W(j)через отрезок вещественной полуоси(-,-1), т.е. левее критической точки при увеличении частоты сверху вниз считается положительным, а снизу вверх - отрицательным.
Система, неустойчивая в разомкнутом состоянии, будет устойчивой в замкнутом состоянии, если разность между числом положительных и отрицательных переходов АФЧХ разомкнутой системы равна s/2. т.е.
![]() ,
,
где
![]() - число положительных переходов,
- число положительных переходов,
![]() - число отрицательных переходов.
- число отрицательных переходов.
Определение запасов устойчивости по годографу Найквиста
Допустим, что АФЧХ некоторой разомкнутой системы имеет вид, показанный на рис. 11.


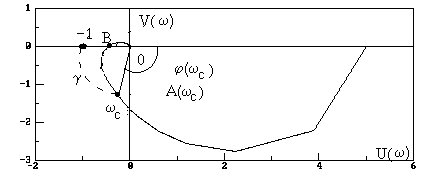
Рис. 11. АФЧХ разомкнутой системы
Угол , образуемый прямой, проходящей через точку пересечения АФЧХ с окружностью единичного радиуса, что соответствует частоте среза системы, и отрицательной вещественной полуосью называется запасом устойчивости системы по фазе и равен
![]() .
.
Запасом устойчивости по модулю называется величина
![]() ,
,
где А() -значение АФЧХ при частоте= , при которой она пересекает вещественную ось.
Для всех систем должны выполняться требования:
![]() ,
,
![]() .
.
Так как АФЧХ графически строится в определенном масштабе, то для вычисления запаса устойчивости по модулю можно просто измерить длины отрезков, соответствующих единице и ОВ, и разделить результат первого измерения на второй. Если увеличивать коэффициент усиления системы, то точка Вбудет смещаться влево и приОВ=-1коэффициент усиления примет критическое значение. Поэтому запас устойчивости по модулю можно определить и по формуле
![]() .
.
Оценка устойчивости и определение запасов устойчивости по ЛЧХ
АФЧХ разомкнутой системы подразделяются на два типа:
1) АФЧХ первого рода, все точки, пересечения которых с вещественной осью расположены справа от критической точки (кривая 1, рис. 12);
2) АФЧХ второго рода, точки, пересечения которых с вещественной осью расположены как справа, так и слева от критической точки (кривая 2, рис. 12).

Рис. 12. Типы АФЧХ
В системах первого рода увеличение коэффициента усиления ведет к сдвигу ветви кривой влево и приближению ее к критической точке. Запасы устойчивости при этом уменьшаются и при k=kкр система попадает на границу устойчивости. Уменьшение коэффициента усиления стабилизирует систему. В системах 2-го рода переход системы на границу устойчивости может происходить как при увеличении коэффициента усиления, так и при его уменьшении. Из критерия Найквиста следует, что замкнутая система, имеющая в разомкнутом состоянии АФЧХ 1-го рода, устойчива, если всем точкам АФЧХ, вплоть до точки пересечения ее с окружностью единичного радиуса (=с), соответствуют значения фазы(), большие, чем-, т.е. должно выполняться неравенствос<.Этому определению легко дать интерпретацию на языке ЛЧХ.

 ()
L()
()
L()




 -1800
-1800









 c
lg
c
lg

 H
H
Рис. 13. ЛЧХ системы 1-го рода
Для того чтобы система, устойчивая в разомкнутом состоянии и имеющая АФЧХ первого рода, была устойчивой и в замкнутом состоянии, необходимо и достаточно, чтобы при всех частотах, при которых ЛАХ положительна, значения фазовой характеристики были больше, чем -, т.е. с<.
По ЛЧХ легко определяются
и запасы устойчивости, причем запас
устойчивости по усилению в логарифмическом
масштабе должен удовлетворять условию
Н>6дБ,
что соответствует значениямh>2,
а по фазе![]() .
.
Для того чтобы САУ, неустойчивая в разомкнутом состоянии и имеющая АФЧХ 2-го рода, была устойчивой в замкнутом состоянии, необходимо и достаточно, чтобы разность между числом положительных и отрицательных переходов фазовой характеристикой через линию - была равна р/2, где р- число корней характеристического уравнения разомкнутой системы, лежащих в правой полуплоскости, при всех частотах, когда L()>0.
 ()
L()
()
L()












 -
-
 -1800
lg
-1800
lg
Рис. 14. ЛЧХ системы 2-го рода
Необходимо подчеркнуть, что показанные способы оценки устойчивости по ЛЧХ и определения запасов устойчивости справедливы при таком расположении оси ординат относительно фазовой характеристики, когда с началом координат совмещена точка ()=-1800.
Если система автоматического управления не удовлетворяет заданным параметрам качества переходного процесса, то требуется произвести ее коррекцию с помощью корректирующего устройства. Методика получения которого показана ниже.
Определение корректирующего устройства
Построение желаемой ЛЧХ системы
Построение желаемой ЛЧХ включает в себя 2 этапа, это построение располагаемой ЛЧХ, и построение желаемой ЛЧХ.
Построение располагаемой ЛЧХ системы
Располагаемую ЛЧХ системы будем строить по передаточной функции разомкнутой системы.

где КОБЩ = 500 1/с – общий коэффициент передачи усилителя; = 0,009 с – время чистого запаздывания; ТТ= 0,05 с – постоянная времени термопары; Т1= 0,195 с , Т2= 0,005 с – постоянные времени электродвигателя;
Сопрягающие частоты:
![]() рад/с
рад/с![]() дек
дек
![]() рад/с
рад/с ![]() дек
дек
![]() рад/с
рад/с![]() дек
дек
График располагаемой ЛЧХ мы построили в п. 2.3., рассмотрим его еще раз (рис. 15)
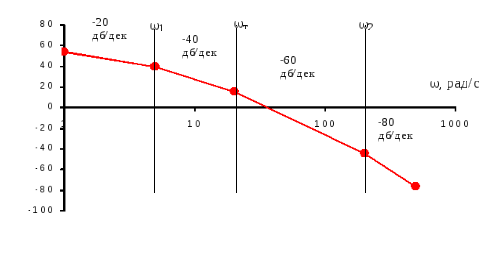
Рис. 15. ЛЧХ системы 2-го рода
Построение желаемой ЛЧХ системы
а). Низкочастотный участок желаемой ЛЧХ ( до 1) совпадает с низкочастотным участком располагаемой ЛЧХ.
б). Среднечастотный участок желаемой ЛАХ проводится из условия обеспечения требуемых запасов устойчивости для выполнения заданной величины перерегулирования – и времени регулирования –tp.
= 28 %
tp = 0.75 c
Среднечастотный участок желаемой ЛЧХ пересекает частотную ось на частоте среза сри проходит под наклоном равным –20 дб/дек. Частота среза определяется согласно номограмме Солодовникова.
![]()
![]()
![]() рад/с Lg(ср)
= 1.21 дек
рад/с Lg(ср)
= 1.21 дек
Протяженность среднечастотного участка от частоты среза определяет запас устойчивости по амплитуде и находится по номограмме Бессекерского.
Для = 28 % получаемLh= 15 дб.
в). Среднечастотный участок желаемой ЛЧХ сопрягается с низкочастотным участком отрезком ЛЧХ, имеющим наклон -60 дб/дек.
г). Высокочастотный участок желаемой ЛЧХ проводится параллельно высокочастотному участку располагаемой ЛЧХ.
В итоге получаем желаемую ЛЧХ (рис. 16.)

I
II
III



Рис. 16. График желаемой ЛЧХ
Определение передаточной функции разомкнутой желаемой системы.
Определим сопрягающие частоты.
I= 0.5 рад/с
II = 3.16 рад/с
III= 100 рад/с
Определим постоянные времени:
TI= 1/I= 2 c
TII= 1/II= 0.32 c
TIII= 1/III= 0.01 c
Получаем желаемую передаточную функцию разомкнутой системы:
![]() ,
,
где КОБЩ= 500 1/с – общий коэффициент передачи усилителя;= 0,009 с – время чистого запаздывания.
Определение передаточной функции корректирующего устройства
Выберем последовательный тип корректирующего устройства. Тогда
WЖ(s) = WР(s)*WПКУ(s),
где WЖ(s) – желаемая передаточная функция; WР(s) – располагаемая передаточная функция; WПКУ(s) – передаточная функция корректирующего устройства.
Перейдем к ЛАХ
LЖ(s) = LР(s) + LПКУ(s)
LПКУ(s) = LЖ(s) – LР(s)
Для построения ЛАХ корректирующего устройства необходимо взять разность ЛАХ желаемой и располагаемой систем (рис. 17.).
III
1
II
I
T
2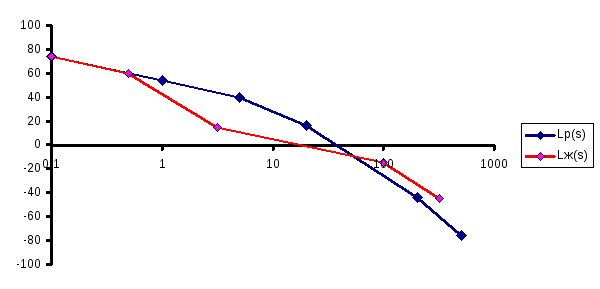






Рис. 17. Графики располагаемой и желаемой ЛАХ
Производим вычитание:
а). Участок графика до частоты I– пройдет с наклоном (-20) – (-20) = 0 дб/дек.
б). Участок графика от IдоII– с наклоном (-60) – (-20) = -40 дб/дек.
в). Участок графика от IIдо1– с наклоном (-20) – (-20) = 0 дб/дек.
г). Участок графика от 1доТ– с наклоном (-20) – (-40) = 20 дб/дек.
е). Участок графика от ТдоIII– с наклоном (-20) – (-60) = 40 дб/дек.
ж). Участок графика от IIIдо2– с наклоном (-80) – (-60) = -20 дб/дек.
з). Участок графика от 2– с наклоном (-80) – (-80) = 0 дб/дек.
Получаем график переходного процесса (рис. 18.).
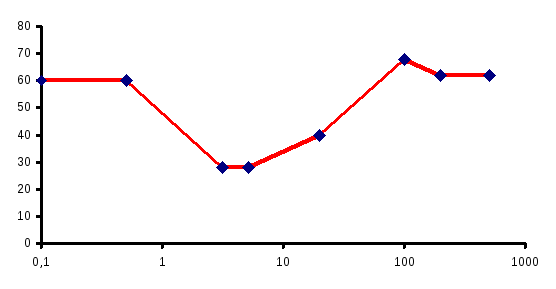
Рис. 18. График корректирующей ЛАХ с параметрами
I= 0.5 рад/с TI= 2 c
II= 3.16 рад/с TII= 0.32 c
1= 5.13 рад/с T1= 0.195 c
T= 20 рад/с TT= 0.05 c
III= 100 рад/с TIII= 0.01 c
2= 200 рад/с T2= 0.005 c
= 0,009 с
Определяем передаточную функцию корректирующего устройства:

Задание 2.Исследование качества переходных процессов САУ
Для САУ в соответствии с вариантом задания построить переходную и импульсную характеристику замкнутой системы и определить следующие параметры качества:
величину перерегулирования;
время переходного процесса;
статическую ошибку;
время регулирования;
коэффициент ошибки по положению;
коэффициент ошибки по скорости;
коэффициент ошибки по ускорению;
интегральные оценки качества.
Теоретические сведения
Графическое представление переходных и импульсных функций называют временными характеристиками. Временные характеристики представляют процессы, происходящие в динамическом и статическом режимах. Переходной функцией h(t)называют функцию, описывающую сигнал на выходе при условии, что на вход подано единичное ступенчатое воздействие при нулевых начальных условиях. График переходной функции, представляющий собой зависимость функцииh(t)от времениt, называют переходной характеристикой. В том случае, если амплитуда единичного ступенчатого воздействия отлична от единицы, получают разновидность переходной характеристики, которая называется кривой разгона.
Импульсной дикцией или весовой функцией w(t)называют функцию, описывающую реакцию на единичное импульсное воздействие при нулевых начальных условиях. График зависимости функцииw(t)от времени называют импульсной переходной (импульсной характеристикой).
Аналитическое определение переходных функций и характеристик основано на следующих положениях. Если задана передаточная функция системы или составной части W(p)и известен входной сигналx(t), то выходной сигналy(t)определяется следующим соотношением:
![]() .
.
Таким образом,
изображение выходного сигнала
![]() представляет собой произведение
передаточной функции на изображение
входного сигнала
представляет собой произведение
передаточной функции на изображение
входного сигнала![]() .
Сигналy(t)в явном виде получился после перехода
от изображения
.
Сигналy(t)в явном виде получился после перехода
от изображения![]() к оригиналуy(t).
Для большинства случаев линейных систем
и составных элементов разработаны
таблицы, позволяющие производить переход
от изображений к оригиналу и обратно.
к оригиналуy(t).
Для большинства случаев линейных систем
и составных элементов разработаны
таблицы, позволяющие производить переход
от изображений к оригиналу и обратно.
Так как изображение
единичного ступенчатого воздействия
равно![]() ,
то изображение переходной функции
определяется соотношением:
,
то изображение переходной функции
определяется соотношением:
![]() .
.
Следовательно, для нахождения переходной функции необходимо передаточную функцию разделить на оператор Лапласа pи выполнять переход от изображения к оригиналу.
Изображение единичного импульса равно 1. Тогда изображение импульсной функции определяется выражением:
![]() .
.
Таким образом, передаточная функция является изображением импульсной функции.
Т
![]()
![]() ,
то между импульсной и переходной
функциями существует следующая
зависимость:
,
то между импульсной и переходной
функциями существует следующая
зависимость:
Методы построения переходной функции