

2006 год |
РУКОВОДСТВО ПО ПРОЕКТИРОВАНИЮ ПРОМЫШЛЕННЫХ ХОЛОДИЛЬНЫХ СИСТЕМ |
10.2.2 Плавное |
Основное различие между плавным и |
регулирование |
двухпозиционным регулированием |
|
заключается в том, что системы плавного |
|
регулирования постоянно реагируют на |
|
изменение регулируемой величины. |
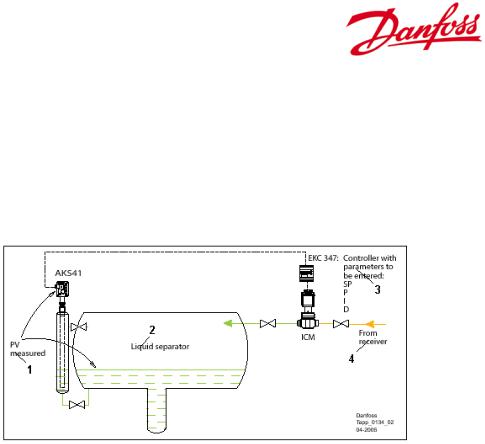
Пример плавного регулирования
***- Жидкость высокого давления
***- Жидкость низкого давления
1 – Измерение регулируемой величины
2 – Отделитель жидкости
3– Контроллер с функциями П-, И-, Д-регулятора
4– Из ресивера
Основные законы регулирования
Большинство контроллеров позволяют изменять параметры регулирования.
-В П-контроллерах можно изменять параметры РВ и Кр.
-В ПИ-контроллерах можно изменять параметры РВ или Кр и Ti.
-В ПИД-контроллерах можно изменять параметры РВ или Кр, Ti и Td.
99
Электронные регуляторы (контроллеры) дают возможность легко изменять различные законы регулирования, в том числе пропорциональный, интегральный и дифференциальный. Это придает контроллеру высокую степень универсальности, поскольку он может применяться в различных системах регулирования.