

Корректирующее устройство по задающему воздействию.
Здесь наряду с сигналом
ошибки вводится во внутреннюю цепь еще
сигнал задающего устройства
 через некоторую передаточную функцию
через некоторую передаточную функцию .
В этом случае структурная схема системы
будет иметь вид, показанный на рисунке
16.
.
В этом случае структурная схема системы
будет иметь вид, показанный на рисунке
16.

Тогда выходной сигнал
 в преобразовании по Лапласу выразится
в виде
в преобразовании по Лапласу выразится
в виде
 ,
,
то есть эквивалентная
передаточная функция замкнутой системы
по регулируемой величине
 будет равна
будет равна
 ,
,
а для ошибки
 .
.
Значение установившийся ошибки будет равна нулю при любой форме задающего воздействия в том случае, если
 .
.
Обычно это условие инвариантности
удовлетворить полностью нельзя, но
можно подобрать приближенное равенство
для определенной области частот
(практически отрабатываемой системой).
Такая неполная инвариантность весьма
существенно уменьшает ошибку
 системы управления. Возможны и другие
варианты коррекции по заданному
воздействию.
системы управления. Возможны и другие
варианты коррекции по заданному
воздействию.
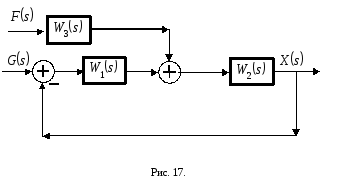
Корректирующее устройство по возмущению.
Рассмотрим систему автоматического управления, структурная схема которой имеет вид, показанный на рисунке 17.
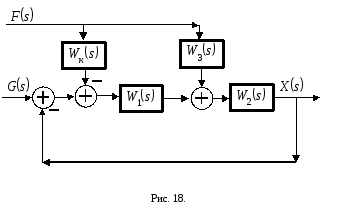
Введем корректирующее
устройство
 ,
входом которого является возмущающее
воздействие
,
входом которого является возмущающее
воздействие .
Структурная схема такой системы
представлена на рисунке 18.
.
Структурная схема такой системы
представлена на рисунке 18.
Тогда передаточная функция
замкнутой системы для регулируемой
величины
 по возмущающему воздействию будет равна
по возмущающему воздействию будет равна
 .
.
Условие полной инвариантности принимает вид
 .
.
Здесь так же можно ограничится
неполной инвариантностью, если реализация
 вызывает технические трудности.
вызывает технические трудности.
Особая трудность – возмущающее
воздействие
 ,
в отличии от задающего
,
в отличии от задающего не всегда можно подать на вход
не всегда можно подать на вход .
Для этого нужно измерять
.
Для этого нужно измерять ,
что не всегда возможно. Существуют
косвенные методы оценки
,
что не всегда возможно. Существуют
косвенные методы оценки ,
которые широко используются в практике.
,
которые широко используются в практике.
Введение корректирующих устройств по внешним возмущениям является важным методом повышения точности систем автоматического управления. Этот метод обладает существенной положительной особенностью. Как видно из приведенных передаточных функций, характеристическое уравнение замкнутой системы при введении такой коррекции остается неизменным. Следовательно, этот способ коррекции существенно повышает точность системы, почти не влияет на качество переходных процессов управления, в то время как все предыдущие методы повышения точности всегда были связаны с ухудшением качества переходного процесса, если не принимать дополнительные меры.
Рассмотрим наиболее часто применяемые типы последовательных корректирующих устройств.
Введение производной от ошибки.
Это простейший способ улучшения качества переходного процесса. Структурная схема системы в этом случае может иметь вид, показанный на рисунке 4.
Технически это может быть осуществлено различными способами (устройствами), при чем производная может быть реализована не в чистом виде, а с инерциальностью, например, в виде звена с передаточной функцией вида
 .
.
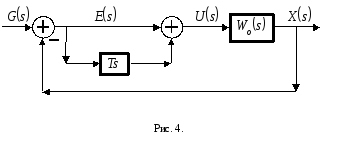
Передаточная функция разомкнутой системы, показанной на рисунке 4, будет
 .
.
Выполнив замену переменной
 в последнем равенстве, получим амплитудную
и фазовую частотную характеристики
разомкнутой системы в виде
в последнем равенстве, получим амплитудную
и фазовую частотную характеристики
разомкнутой системы в виде
 ,
, ,
,
где
 ,
, - амплитудная и фазовая частотные
характеристики объекта управления.
- амплитудная и фазовая частотные
характеристики объекта управления.
Существенным здесь является то, что при введении сигнала по производной от ошибки как бы добавляется положительная фаза. Вследствие этого радиус-векторы амплитудно-фазовой характеристики поворачивается против часовой стрелки, увеличивается запас устойчивости и улучшается качество переходного процесса. Соответствующие типовые амплитудно-фазо-частотные характеристики представлены на рисунке 5.
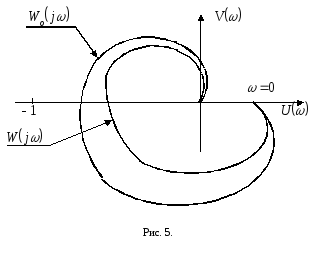
В случае не идеального дифференциирующего звена (дифференциирующее звено с инерцыальностью) этот эффект несколько уменьшается, но качественно он сохраняется. Введение производной от ошибки может служить также и стабилизирующим средством, превращает неустойчивую систему в устойчивую.