

Zagryadtskiy_elektr_mashiny_2
.pdfПри питании двигателя напряжением с частотой 50 Гц возможны следующие синхронные числа оборотов: 3000, 1500, 1000, 750,
500 мин−1, соответствующие статорным обмоткам с 2, 4, 6, 8, 12 полюсами. При питании обмоток напряжением с частотой 60 Гц при тех же полюсах можно получить частоты вращения: 3600, 1800, 1200,
900, 720 мин−1.
Полюсопереключаемые двигатели, позволяющие ступенчато регулировать частоту вращения ротора, называются многоскоростными. Они выпускаются на 2, 3 и 4 ступени частоты вращения.
Двухскоростные двигатели охватывают частоты вращения
1500/3000, 1000/1500, 750/1500 и 500/1000 мин−1 трехскоростные 1000/1500/3000, 750/1000/1500 мин−1 четырехскоростные 500/750/1000/1500 мин−1.
Двигатели с такими числами оборотов применяются в металлорежущих и деревообрабатывающих станках, шаровых мельницах, смесителях, центробежных сепараторах и других исполнительных механизмах. Использование многоскоростных двигателей позволяет упростить кинематическую цепь станка; упростить управление процессами пуска (пуск двигателя на низшей скорости), остановки, реверса и торможения.
Ступенчатое регулирование частоты вращения возможно осуществить следующими способами:
- укладкой в пазы статора двух независимых обмоток на разное число полюсов, такие обмотки ничем не отличаются от обычных статорных обмоток асинхронных двигателей;
-укладкой в пазы статора одной обмотки, части которой (катушки, секции) могут соединяться различными способами так, чтобы получить разное число полюсов;
-комбинированным методом, включающим первый и второй способы.
Второй способ переключения полюсов можно проиллюстрировать рис. 1.37 , на котором приведена простейшая схема одной фазы обмотки, состоящей из двух катушек. Вначале соединим катушки последовательно и согласно рис. 1.37, а. Зададимся направлением тока, например от начала фазы А к концу фазы Х. По правилу буравчика определим направление магнитного поля. Получается 4 полюса. Теперь соединим катушки согласно и встречно (рис. 1.37, б). В этом случае получаем двухполюсную обмотку. Двухполюсная обмотка может быть получена путем параллельного соединения катушек
(рис. 1.37, в).
80
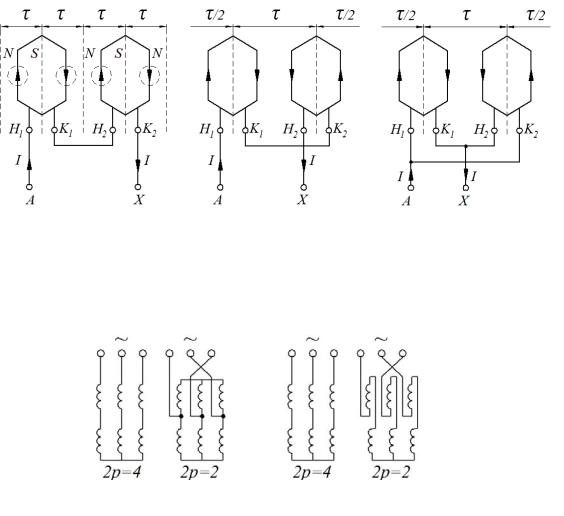
На рис. 1.38 даны схемы трехфазных обмоток. Схема
(рис. 1.38, а) на 2р = 4 |
содержит в каждой фазе по две последова- |
тельно соединенных |
полуобмотки, а схема на рис. 1.38, б |
с 2р = 2 имеет по две параллельно соединенных полуобмотки. При переключениях момент двигателя остается постоянным. При постоянной мощности схема переключений полуобмоток приведена на рис. 1.38, в,г.
а |
б |
в |
Рис. 1.37. Принципиальные схемы соединения катушек обмотки:
а)– последовательное, 2p=4 и б) – последовательная; 2р=2; в) – параллельное, 2p=2
а |
б |
в |
г |
Рис. 1.38. Схемы трехфазных двухскоростных обмоток
При переключении числа полюсов двигателя в зависимости от режима работы в общем случае меняется фазное напряжение, способ соединения фаз, число катушек и витков в них и т.д. Эти сведения можно получить из специальной литературы [7].
В качестве недостатка полюсопереключаемых двигателей следует отметить наличие громоздкого переключающего устройства и разрыв цепи статора при переключении.
81
Регулирование числа оборотов изменением приложенного напряжения. Приложенное напряжение к двигателю можно изменять путем включения активных и индуктивных сопротивлений в цепь статорных обмоток, либо, что предпочтительно, применением полупроводникового регулятора напряжения.
Если обратиться к формуле (1.96), то нетрудно установить, что скольжение двигателя является функцией многих параметров, а именно
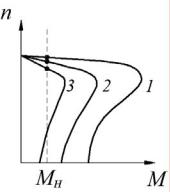
Рис. 1.39. Механические характеристики двигателя
при различных напряжениях:
1– при U1 =U1H ;
2– при U1′ <U1H ;
3 – при U1′′<U1′
s = f (f1, p, R2,U1 , M c ).
При уменьшении подводимого к двигателю напряжения и неизменном статическом моменте исполнительного механизма скольжение возрастает, а величины пускового и максимального моментов, соглас-
но (1.98) и (1.99), уменьшаются (рис. 1.39). Из приближенного выражения момента (1.97) следует, что скольжение изменяется обратно пропорционально квадрату приложенного напря-
|
s |
U |
1н |
2 |
|
жения, т.е. |
|
|
|
||
|
|
|
|||
sн |
≈ |
|
|
. |
|
|
|
U1 |
|||
Изменение подводимого напряжения дает узкий диапазон регулирования частоты вращения двигателя.
Пример 11. Четырехполюсный двигатель имеет следующие данные: синхронная частота вращения магнитного поля
n1 =1500мин−1 , скольжение s = 0,03, номинальное фазное напряже-
ние U1н = 220В.
Определить диапазон изменения частоты вращения при
U1 =180В.
Решение:
Номинальная частота вращения двигателя равна n = n1 (1−s)=1500(1−0,03)=1455мин−1.
Скольжение двигателя при пониженном напряжении согласно
(1.97)
U |
1н |
2 |
220 |
2 |
|||
|
|
|
|
|
|
|
|
|
|
= 0,03 |
|
= 0,045. |
|||
s = sн |
|
|
|
||||
|
U1 |
180 |
|
|
|||
|
|
|
|
82 |
|
|
|
Частота вращения двигателя при пониженном напряжении
n = n1 (1−s)=1500(1−0,045)≈1433мин−1.
Диапазон изменения оборотов
D = n n =1455 1433 ≈1.02.
Более эффективно регулирование частоты вращения изменением напряжения можно осуществить, если исполнительные механизмы обладают вентиляторным моментом – вентиляторы, центрифуги и др. Для них статический момент зависит от квадрата частоты вра-
щения.
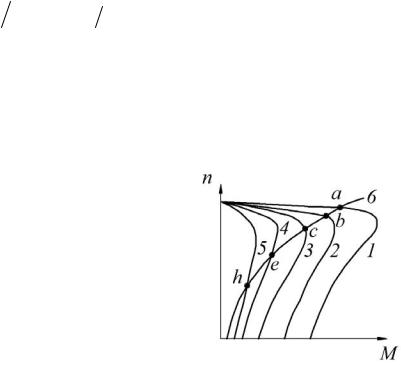
На рис. 1.40 представлены кривые 1…5 механических характеристик двигателя при различных напряжениях, кривая 1 при номинальном напряжении (естественная характеристика), кривая 5 – при минимальном
напряжении. Кривая |
6 – механическая |
||
характеристика |
вентилятора. |
Частота |
|
вращения вентилятора определяется точками пересечения a, b, c, e, h механических характеристик двигателя и вентилятора. Изменяя подаваемое напряжение на двигатель от номинального до минимального (согласно
Рис. 1.40. Механические характеристики:
1 – 5 – двигателя;
6 – вентилятора
диапазона регулирования), получим широкий диапазон изменения частоты вращения. Регулирование напряжения, подаваемого на двигатель, осуществляется переключением отпаек трансформатора, либо тиристорным (транзисторным) регулятором напряжения.
Импульсное регулирование частоты вращения. Импульсным регулированием частоты вращения двигателя называется такое регулирование, при котором при подключении обмотки статора к напряжению двигатель разгоняется, а во время отключения питания (пауза) двигатель тормозится. Двигатель работает в режиме ускорений и замедлений. В установившемся режиме, когда время подачи напряжения (импульс) и время паузы не меняются, устанавливается постоянная средняя частота вращения. Если время импульса увеличивается, а время паузы уменьшается при постоянном времени цикла, средняя частота вращения двигателя увеличивается. Изменяя время пуска
83

и время торможения можно регулировать частоту вращения двигателя. Для осуществления импульсного способа регулирования могут использоваться транзисторы, работающие в режиме ключа, либо тиристоры. Частота их коммутации лежит в диапазоне 5000…10000 Гц.
Регулирование числа оборотов изменением активного сопро-
тивления в цепи ротора. Данный способ применим для двигателей с фазным ротором. Он предполагает введение в обмотку ротора дополнительного резистора как и при пуске двигателя, но рассчитанного на продолжительную работу. Способ регулирования позволяет изменять число оборотов в сторону его уменьшения. На рис. 1.41 приведены кривые n = f (M ) без введения сопротивления 1 и кри-
вые 2 – 4 с введенным в фазы ротора сопротивлением RП . Недостат-
ком этого метода регулирования является небольшой диапазон регулирования и рост потерь энергии при уменьшении частоты вращения.
Рис. 1.41. Механическая характеристика двигателя при различных активных сопротивлениях ротора:
1 – естественная характеристика RП1 = 0 ;
2 – 4 – искусственные характеристики RП4 > RП3 > RП2 > RП1
Пример 12. Шестиполюсный двигатель с фазным ротором име-
ет активное сопротивление |
фазы обмотки ротора r2 = 0,02Ом, |
число оборотов n = 977 мин−1 , |
f1 = 50Гц. |
Определить, какое необходимо ввести в обмотку ротора сопротивление rд, чтобы ротор вращался с числом оборотов
n′ = 715мин−1. Тормозной момент остается неизменным. Решение:
Синхронная частота вращения магнитного поля статора n1 = 60pf1 = 60350 =1000мин−1.
84

Скольжение при частоте вращения n = 997мин−1
s = n1 − n =1000 − 977 = 0,023. n1 1000
Скольжение при частоте вращения n′ = 715мин−1
s′ = n1 − n′ =1000 − 715 = 0,285. n1 1000
Для определения добавочного сопротивления воспользуемся формулой (1.79). Приравнивая выражения для моментов двигателя, содержащих скольжения s и s′, получим
r |
= r |
s′ |
|
0,285 |
|
= 0,2278Ом. |
|||
|
|
−1 |
= 0,02 |
|
|
−1 |
|||
|
0,023 |
||||||||
д |
2 |
s |
|
|
|
|
|||
Вопросы для самоконтроля
1.Какие способы регулирования числа оборотов двигателя с короткозамкнутым ротором Вы знаете?
2.Как можно регулировать частоту вращения двигателя с фазным ротором?
3.Какой способ регулирования частоты вращения наиболее экономичный?
4.Объясните, в чем состоит конструктивное различие в устройстве обмотки в обычном и многоскоростном двигателях?
5.Какие Вы знаете законы регулирования частоты и напряжения при частотном управлении двигателем?
1.16. Электрическое торможение двигателей
Существуют следующие виды электрического торможения асинхронных двигателей:
-противовключением обмотки статора,
-генераторное,
-динамическое.
85
Торможение противовключением. Электрическое торможение асинхронного двигателя можно осуществить путем взаимного переключения двух фаз статорной обмотки работающего двигателя. В этом случае направление вращения магнитного поля становится противоположным направлению вращения ротора, и машина переходит в режим электромагнитного тормоза. В этом случае скольжение становится больше единицы (см. п. 1.4), ЭДС в роторе, по сравнению с пусковым режимом, увеличивается. В этом случае торможение сопровождается значительными токами в роторе и статоре, механическими и тепловыми перенапряжениями. Для предотвращения разгона двигателя в обратном направлении вращения должны быть предусмотрены средства контроля, например, датчик частоты вращения. При снижении частоты вращения двигателя до нуля, датчик дает сигнал на устройство отключения двигателя от напряжения сети.
Режим торможения противовключением используют для быстрой остановки исполнительных механизмов. Его достоинством является то, что он позволяет создавать большие тормозные моменты при низких частотах вращения двигателей.
Генераторное торможение (рекуперативное). Генераторное торможение имеет место при переключении многоскоростного двигателя с большей скорости на меньшую. В первый момент времени частота вращения двигателя оказывается намного больше частоты вращения магнитного поля. Скольжение получается отрицательным,
имашина переходит в генераторный режим (режим асинхронного генератора). Торможение происходит с превращением кинетической энергии вращающихся частей в электрическую энергию, которая за вычетом потерь, отдается в сеть. Генераторное торможение может быть также при спуске груза, разгоняющего двигатель до частоты вращения, превышающую синхронную частоту вращения.
Динамическое торможение. Другим видом электрического торможения является динамическое торможение. Для реализации торможения, асинхронный двигатель отключается от сети трехфазного переменного тока и, используя различные схемы, подключается к источнику постоянного тока (рис. 1.42, а) В двигателе создается постоянный магнитный поток. В результате вращения двигателя в постоянном магнитном поле в обмотке роторе наводится переменная ЭДС,
ив ней протекает ток. Взаимодействие тока ротора с постоянным магнитным потоком создает тормозной момент. В режиме динамического торможения асинхронный двигатель превращается в синхронный генератор.
86
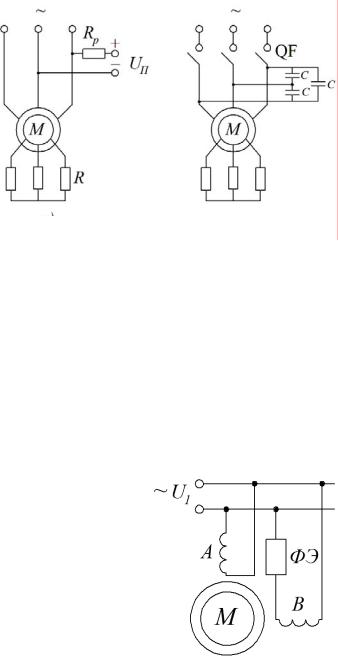
Режим динамического торможения можно получить при отсутствии источника постоянного тока. В этом случае, отключив обмотку
статора от сети, замыкают ее |
|
|
||||
на конденсаторы (рис. 1.42, б). |
|
|
||||
Генераторное торможение осу- |
|
|
||||
ществляется путем емкостного |
|
|
||||
возбуждения |
асинхронной |
|
|
|||
машины. |
Необходимая |
для |
|
|
||
возбуждения |
генераторного |
|
|
|||
режима |
реактивная |
энергия |
|
|
||
обеспечивается |
подключен- |
|
|
|||
ными к |
статорной |
обмотке |
а |
б |
||
конденсаторами. В этом случае |
||||||
машина |
работает в |
режиме |
Рис. 1.42. Принципиальные схемы включения |
|||
асинхронного генератора |
(см. |
двигателя при динамическом торможении: |
||||
п. 1.18) и |
развивает тормозной |
а) при подаче в обмотку постоянного тока; |
||||
|
б) при помощи конденсаторов |
|||||
момент. |
|
|
|
|
|
|
|
|
|
|
|
|
|
1.17. Однофазный двигатель
Однофазный асинхронный двигатель. Двигатель по конструк-
ции представляет собой двухфазную машину – с двумя распределенными обмотками А и В на статоре (рис. 1.43).
Обмотки сдвинуты в пространстве на угол 90º, но получают питание от однофазной сети. Обмотка ротора выполнена многофазной в виде короткозамкнутой клетки.
Обмотка А – рабочая, включается непосредственно в однофазную сеть.
Обмотка В – пусковая (вспомогательная). Она соединена последовательно с фазосдвигающим элементом ФЭ и подключена к той же сети, что и рабочая обмотка. В качестве фазосдвигающего элемента могут служить активное сопротивление, индуктивная катушка, либо чаще всего конденсатор.
При подаче синусоидального напряжения только на обмотку А, двигатель не развивает пускового момента, он не вращается. Происходит это потому, что пульсирующая МДС фазы А с амплитудой
87

Fm может быть представлена двумя вращающимися в противоположные стороны МДС с половинной амплитудой Fm  2
2
F = F sin ωt cos α = |
Fm |
sin(ωt − α)+ |
Fm |
sin(ωt + α). |
(1.105) |
|
|
||||
m |
2 |
2 |
|
|
|
|
|
|
|||
Оба магнитных поля, вращаясь в противоположных направлениях с одинаковыми синхронными числами оборотов, создают одинаковые вращающиеся моменты, направленные навстречу друг другу, вследствие чего ротор остается неподвижным. Отсутствие начального вращающего момента является основным недостатком однофазного двигателя. Однако это наблюдается только при неподвижном роторе. Если ротор привести во вращение с числом оборотов n посторонней силой, то он начинает вращаться, причем в ту сторону, в которую он получил импульс.
Если частота вращения ротора n совпадает с частотой вращения одного из магнитных полей n1 , то это поле называется прямым полем.
Поле противоположного направления – обратное поле. Скольжение ротора относительно прямого поля sпр
sпр = (n1 −n) n1 =1−n n1 . |
(1.106) |
Скольжение ротора относительно обратного поля sобр
sобр = (n1 +n) n1 =1+n n1 . |
(1.107) |
Выражая из (1.106) отношение n n1 и подставляя его в (1.107), получим, что
n1 и подставляя его в (1.107), получим, что
sобр = 2 −sпр. |
(1.108) |
Частота токов, наводимая в роторе от прямого поля равна
f2пр = f1 sпр, |
(1.109) |
а частота токов, наводимая в обмотке ротора, от обратного поля будет
f2обр = f1 sобр, |
(1.110) |
и она равна почти удвоенной частоте сети.
88
При вращении однофазного двигателя скольжение ротора относительно обратного поля составляет sобр = 2 − sпр . Вызванный этим
полем ток ротора определяется не активным сопротивлением, а индуктивным сопротивлением, пропорциональным скольжению sобр.
Ток ротора, вызванный обратным полем, создает магнитное поле ротора, направленное практически противоположно обратному магнитному полю. Поэтому короткозамкнутая обмотка ротора по отношению к обратному полю действует как демпфирующий контур. В результате этого результирующий поток однофазного двигателя приближается к вращающемуся потоку.
Начальный пусковой момент может быть создан при помощи пусковой обмотки В, она включается лишь во время пуска для создания вращающегося магнитного поля.
Для того, чтобы получить вращающееся магнитное поле (см. п. 1.1.2) и, следовательно, пусковой момент, необходимо сдвинуть ток в пусковой обмотке во времени на угол 90º. Теоретический анализ показывает, что в случае применения в качестве фазосдвигающего элемента активного сопротивлении или индуктивности невозможно получить круговое вращающееся магнитное поле. Поле имеет эллиптический характер, т.е. его амплитуда периодически меняется в некоторых пределах. Вращающееся магнитное поле будет круговым, если в качестве пускового элемента будет использован конденсатор.
После достижения номинальных оборотов пусковая обмотка может быть отключена, но двигатель будет продолжать вращаться.
Однофазные двигатели с пусковыми элементами имеют специальные пусковые устройства, включающие вспомогательную обмотку и пусковой элемент, используемые только во время пуска. В качестве пускового устройства наиболее распространены центробежные выключатели; применяют реле времени и токовые реле.
Чтобы избежать установки пусковых элементов, которые должны быть рассчитаны на пусковой ток обмотки, во многих двигателях пусковую обмотку выполняют с повышенным сопротивлением.
Однофазный конденсаторный двигатель. В конденсаторном двигателе во время работы статорные обмотки постоянно соединены с сетью. Вращающееся магнитное поле образуется за счет электрического сдвига по фазе тока в обмотке В путем последовательного включения с ней конденсатора. Такой двигатель называется конденсаторным. Схема конденсаторного двигателя приведена на рис. 1.44.
89